TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025140643
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024040172
出願日
2024-03-14
発明の名称
画像処理装置、画像処理方法、およびプログラム
出願人
株式会社オプトル
代理人
弁理士法人酒井国際特許事務所
主分類
G06T
7/70 20170101AFI20250919BHJP(計算;計数)
要約
【課題】浚渫作業の自動化を実現することができる、画像処理装置、画像処理方法、およびプログラムを提供する。
【解決手段】本発明は、撮影装置により作業機械の施工エリアを撮影して得られる撮影画像と、前記撮影装置によって撮影された被写体との距離を計測する距離測定装置により前記施工エリアを測定して得られる距離情報と、を用いて、前記施工エリア内の対象物の三次元位置情報を検出する特徴検出部と、前記特徴検出部により検出された前記対象物の前記三次元位置情報を用いて前記対象物の位置および姿勢を算出する施工状況演算部と、前記施工状況演算部により算出される前記対象物の位置および姿勢を報知する報知部と、を備える。
【選択図】図2B
特許請求の範囲
【請求項1】
撮影装置により作業機械の施工エリアを撮影して得られる撮影画像と、前記撮影装置によって撮影された被写体との距離を計測する距離測定装置により前記施工エリアを測定して得られる距離情報と、を用いて、前記施工エリア内の対象物の三次元位置情報を検出する特徴検出部と、
前記特徴検出部により検出された前記対象物の前記三次元位置情報を用いて前記対象物の位置および姿勢を算出する施工状況演算部と、
前記施工状況演算部により算出される前記対象物の位置および姿勢を報知する報知部と、
を備える画像処理装置。
続きを表示(約 1,100 文字)
【請求項2】
前記撮影画像および前記距離情報を受信するデータ受信部を備える請求項1に記載の画像処理装置。
【請求項3】
前記特徴検出部は、少なくとも前記対象物の3点の特徴を検出し、当該3点の特徴の検出結果に基づいて、前記三次元位置情報を検出する、請求項1または2に記載の画像処理装置。
【請求項4】
前記特徴検出部は、前記対象物の2辺以上に存在する特徴を検出する、請求項1に記載の画像処理装置。
【請求項5】
前記撮影装置および前記距離測定装置から前記施工エリアまでの距離と略同等以上に前記対象物間の距離が離れている、請求項1に記載の画像処理装置。
【請求項6】
前記施工状況演算部は、前記対象物の前記三次元位置情報を用いて前記施工エリアの土砂分布を算出する、請求項1に記載の画像処理装置。
【請求項7】
前記特徴検出部は、予め作成されたモデルに基づいて前記対象物の前記三次元位置情報を検出する学習アルゴリズムを用いる、請求項1に記載の画像処理装置。
【請求項8】
前記施工状況演算部は、前記対象物の前記三次元位置情報の一部の信頼度が低い場合、信頼度が高い対象物の前記三次元位置情報と、前記対象物間の位置関係と、歪補正済みの前記撮影画像とに基づいて、前記対象物の位置および姿勢を算出する、請求項1に記載の画像処理装置。
【請求項9】
画像処理装置で実行される画像処理方法であって、
撮影装置により作業機械の施工エリアを撮影して得られる撮影画像と、前記撮影装置によって撮影された被写体との距離を計測する距離測定装置により前記施工エリアを測定して得られる距離情報と、を用いて、前記施工エリア内の対象物の三次元位置情報を検出するステップと、
検出された前記対象物の前記三次元位置情報を用いて前記対象物の位置および姿勢を算出するステップと、
算出される前記対象物の位置および姿勢を報知するステップと、
を含む画像処理方法。
【請求項10】
コンピュータを、
撮影装置により作業機械の施工エリアを撮影して得られる撮影画像と、前記撮影装置によって撮影された被写体との距離を計測する距離測定装置により前記施工エリアを測定して得られる距離情報と、を用いて、前記施工エリア内の対象物の三次元位置情報を検出する特徴検出部と、
前記特徴検出部により検出された前記対象物の前記三次元位置情報を用いて前記対象物の位置および姿勢を算出する施工状況演算部と、
前記施工状況演算部により算出される前記対象物の位置および姿勢を報知する報知部と、
して機能させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、画像処理装置、画像処理方法、およびプログラムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
グラブバケット等の作業機械に加速度センサおよび角速度センサを装備し、加速度センサからの水底のグラブバケットの位置信号と、角速度センサからの水底のグラブバケットの傾き信号および方位信号と、をデータ処理演算装置(画像処理装置の一例)に基準データとともに入力して演算処理し、水底におけるグラブバケットの実際の位置信号と傾き信号と方位信号とを含む演算データを得て、当該演算データに基づいてグラブバケットを操作する技術が開示されている(特許文献1参照)。
【発明の概要】
【発明が解決しようとする課題】
【0003】
しかしながら、上記の技術では、グラブバケットによって所定水域の水底を掘削する浚渫作業において、波や風等の周辺環境の影響によって掘削作業場所、掘削した土砂を放土する場所が逐次変化するため自動化が難しく、熟練オペレーターによる操作が必要であり、改善の余地がある。
【0004】
本発明は、上記に鑑みてなされたものであって、浚渫作業の自動化を実現することができる、画像処理装置、画像処理方法、およびプログラムを提供することを目的とする。
【課題を解決するための手段】
【0005】
上述した課題を解決し、目的を達成するために、本発明は、撮影装置により作業機械の施工エリアを撮影して得られる撮影画像と、前記撮影装置によって撮影された被写体との距離を計測する距離測定装置により前記施工エリアを測定して得られる距離情報と、を用いて、前記施工エリア内の対象物の三次元位置情報を検出する特徴検出部と、前記特徴検出部により検出された前記対象物の前記三次元位置情報を用いて前記対象物の位置および姿勢を算出する施工状況演算部と、前記施工状況演算部により算出される前記対象物の位置および姿勢を報知する報知部と、を備える。
【発明の効果】
【0006】
本発明によれば、浚渫作業の自動化を実現することができる、という効果を奏する。
【図面の簡単な説明】
【0007】
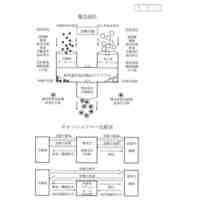
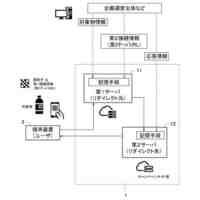
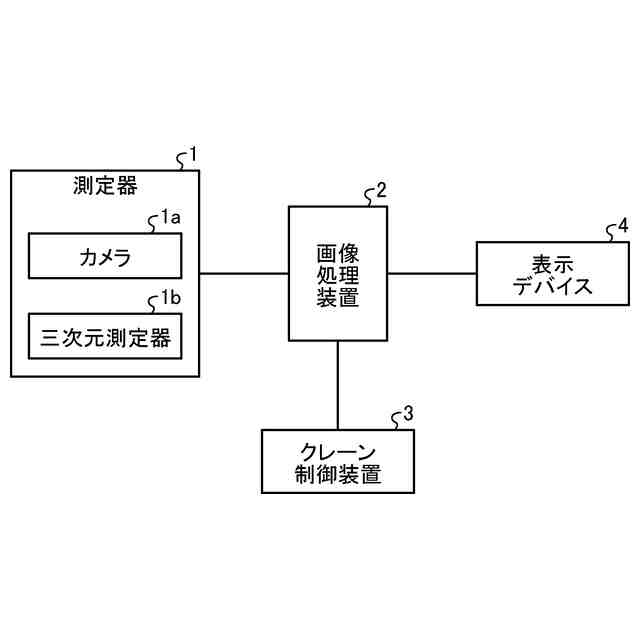
図1は、本実施の形態にかかるクレーンシステムのハードウェア構成の一例を示す図である。
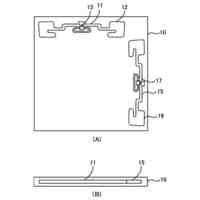
図2Aは、本実施の形態にかかる画像処理装置のハードウェア構成の一例を示すブロック図である。
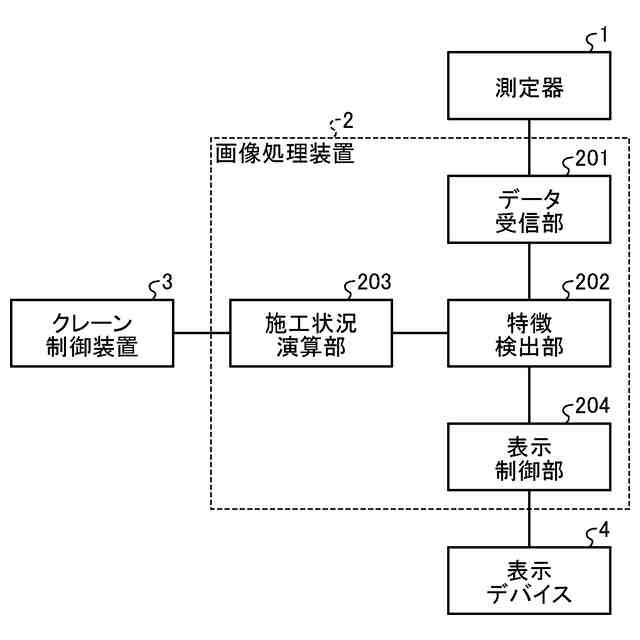
図2Bは、本実施の形態にかかるクレーンシステムが有する画像処理装置内の機能ブロックの一例を説明するための図である。
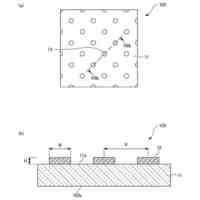
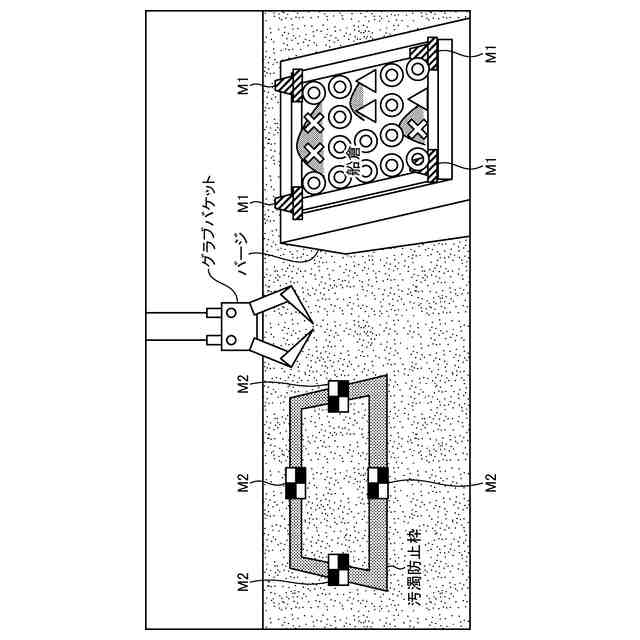
図3は、本実施の形態にかかるクレーンシステムの測定器により撮影する撮影画像の一例を説明するための図である。
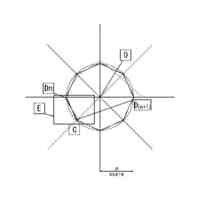
図4は、本実施の形態にかかる画像処理装置による特徴の検出結果の一例を説明するための図である。
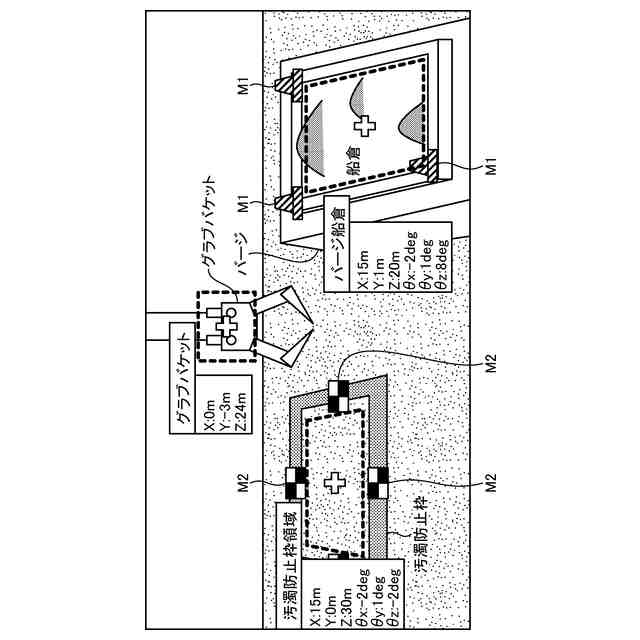
図5は、本実施の形態にかかる画像処理装置における検出対象物の位置および姿勢の検出結果の一例を説明するための図である。
図6は、本実施の形態にかかる画像処理装置によるバージの土砂積載状態の検知結果の一例を説明するための図である。
【発明を実施するための形態】
【0008】
以下に添付図面を参照して、画像処理装置、画像処理方法、およびプログラムを適用したクレーンシステムの実施の形態を詳細に説明する。
【0009】
図1は、本実施の形態にかかるクレーンシステムのハードウェア構成の一例を示す図である。本実施の形態にかかるクレーンシステムは、図1に示すように、測定器1、画像処理装置2、クレーン制御装置3、および表示デバイス4を有する。本実施の形態では、測定器1、画像処理装置2、クレーン制御装置3、および表示デバイス4は、画像処理装置2を介して、互いに通信可能に接続されているが、通信ネットワークを介して互いに通信可能に接続されていても良い。ここで、通信ネットワークは、インターネット、移動体通信網、LAN(Local Area Network)等によって構築されている。通信ネットワークには、有線通信だけでなく、3G(3rd Generation)、WiMAX(Worldwide Interoperability for Microwave Access)、LTE(Long Term Evolution)等の無線通信によるネットワークが含まれても良い。
【0010】
測定器1およびクレーン制御装置3は、クレーンの作業現場に設けられている。測定器1とクレーン制御装置3は、それぞれクレーンと一体で構成されていても良い。現場のオペレーターは、クレーン制御装置3により、現場の作業内容を確認することができる。また、遠隔地の管理者は、通信端末により、現場の作業内容を確認することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
職業自動販売機
24日前
個人
5掛けポイント
1か月前
個人
RFタグシート
1か月前
個人
ペルソナ認証方式
1か月前
個人
情報処理装置
1か月前
個人
自動調理装置
1か月前
個人
立体グラフの利用方法
3日前
個人
農作物用途分配システム
1か月前
個人
インターネットの利用構造
1か月前
個人
タッチパネル操作指代替具
1か月前
個人
サービス情報提供システム
26日前
NISSHA株式会社
入力装置
4日前
個人
学習用データ生成装置
5日前
個人
携帯端末障害問合せシステム
1か月前
個人
スケジュール調整プログラム
1か月前
個人
エリアガイドナビAIシステム
1か月前
キヤノン株式会社
情報処理装置
1か月前
キラル株式会社
顧客体験提供システム
6日前
株式会社ワコム
電子ペン
1か月前
キヤノン株式会社
画像認識装置
18日前
キヤノン株式会社
情報処理装置
18日前
キヤノン株式会社
情報処理装置
18日前
株式会社ワコム
電子ペン
1か月前
株式会社ケアコム
項目選択装置
1か月前
株式会社ケアコム
項目選択装置
1か月前
トヨタ自動車株式会社
通知装置
1か月前
キヤノン株式会社
印刷システム
1か月前
エッグス株式会社
情報処理装置
1か月前
株式会社アジラ
行動推定システム
18日前
大同大學
スーパーアプリ構築方法
18日前
個人
請求金額算出システム
10日前
トヨタ自動車株式会社
車両
1か月前
太陽誘電株式会社
表示装置
1か月前
キヤノン電子株式会社
情報処理システム
3日前
株式会社ITP
仮想展示システム
12日前
株式会社フジシール
識別情報利用システム
24日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ