TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025138546
公報種別
公開特許公報(A)
公開日
2025-09-25
出願番号
2024149681
出願日
2024-08-30
発明の名称
ホースドッキングロボット及び自動化ドッキング消火システム
出願人
個人
代理人
弁理士法人磯野国際特許商標事務所
主分類
B25J
13/08 20060101AFI20250917BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】高度知能化及び自動化ロボットを利用した消防救助作業を実現する。
【解決手段】ホースドッキングロボット及び自動化ドッキング消火システムに関し、ホースドッキングロボットはドッキングロボット本体と、6軸ロボットアームと、レーザレーダと、双眼カメラと、通信アンテナを含み、ドッキングロボットは通信アンテナを介して制御指令を受信し及びドッキング先の位置を取得し、レーザレーダによって構築された二次元シーンマップを使ってドッキング先の位置を探し、消防ホースをドラッグしてドッキングエリアに到着させ、ドッキングエリアに到着させた後、6軸ロボットアームのクリップを使ってホースジョイントを掴み、6軸ロボットアームを導いてドッキング位置姿勢に変換し、ホースジョイントとホースドッキング口とのドッキングを行う。
【選択図】図1
特許請求の範囲
【請求項1】
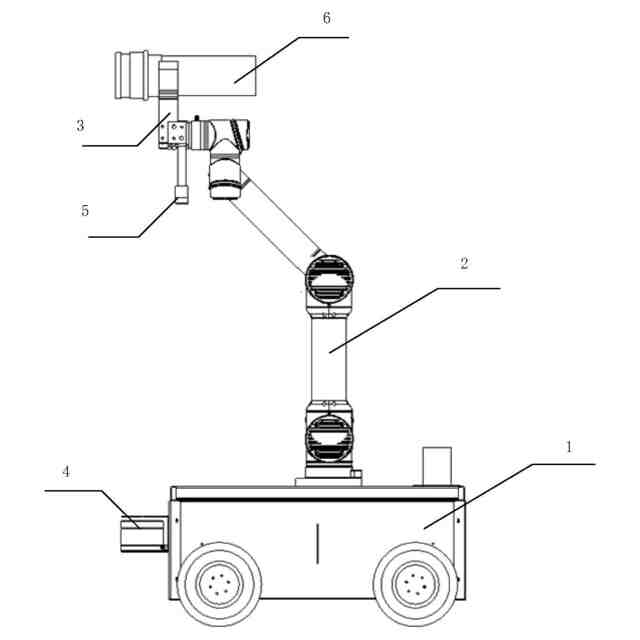
ホースドッキングロボットであって、ドッキングロボット本体と、6軸ロボットアームと、レーザレーダと、双眼カメラと、通信アンテナを含み、
前記通信アンテナは、ドッキングロボット本体のトップカバーに取り付けられ、制御指令を受信し、及びドッキング先の位置を取得するために用いられ、
前記レーザレーダは、ドッキングロボット本体の側壁に取り付けられ、ドッキングロボットの走行中に、ドッキング先の位置を含む二次元シーンマップを構築するために用いられ、
前記6軸ロボットアームの第一エンドは、ドッキングロボット本体のトップカバーに固定され、第二エンドには、ホースジョイントを掴むためのクリップが設けられ、
前記双眼カメラは、ロボットアームの第二エンドに取り付けられ、双眼カメラの視野方向は、クリップで掴まれたホースジョイントの方向と一致し、
ドッキングロボットはレーザレーダによって構築された二次元シーンマップを使ってドッキング先の位置を探し、消防ホースをドラッグしてドッキングエリアに到着させ、ドッキングエリアに到着させた後、ドッキングロボットは、クリップを使ってホースジョイントを掴み、双眼カメラを利用してドッキング先のホースドッキング口の位置を認識し、6軸ロボットアームをドッキング位置姿勢に変換するように導いて、ホースジョイントとホースドッキング口とのドッキングを行うことを特徴とするホースドッキングロボット。
続きを表示(約 2,800 文字)
【請求項2】
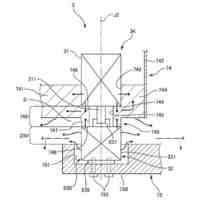
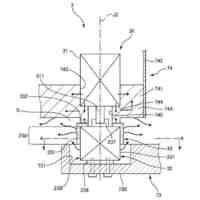
ドッキングロボット本体のトップカバーには、ホースジョイントを置くためのホース設置装置が装備されており、
前記ホース設置装置は、ベース、丸パイプ、テーパ口の三つの部分が溶接されたものであり、ホース設置装置全体の高さ及び内径は、設置されたホースジョイントの深さ及び外径に適合し、テーパ口の錐度は60°であることを特徴とする、請求項1に記載のホースドッキングロボット。
【請求項3】
前記クリップは空気圧式ワイド型平行クリップ爪を含み、クリップ爪の閉じ幅は106mmであり、開き幅は146mmであり、全体ストロークは40mmであることを特徴とする、請求項1に記載のホースドッキングロボット。
【請求項4】
前記ドッキング先は高所作業ロボットであり、
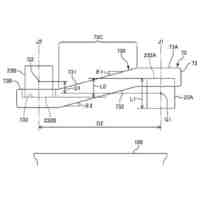
前記高所作業ロボットは、高所作業ロボット本体と、ホースドッキング口と、回転プラットフォームと、高所機械折りアームと、高圧ノズルを含み、
高所作業ロボット本体は四輪走行ロボットであり、回転プラットフォームはロボット本体の頂部に設置され、回転プラットフォームには高所機械折りアームが固定され、高圧ノズルは高所機械折りアームの末端に取り付けられ、ホースドッキング口は高所作業ロボット本体の側壁ハウジングに設置され、管路を介して高ノズルに接続されることを特徴とする、請求項1から請求項3のいずれか1項に記載のホースドッキングロボット。
【請求項5】
ホースドッキング口と同じ側の高所作業ロボットのハウジングにおいて、第一のARUCOコードと第二のARUCOコードとが平行に設置され、これらの第一のARUCOコードと第二のARUCOコードは、ホースがドッキングされるとき、ホースドッキングロボットを導いて、高所作業ロボットとの相対方向角を計算するために用いられ、
ホースドッキング口の直下に第三のARUCOコードが設置され、前記第三のARUCOコードの中心位置とホースドッキング口の中心の距離は、ドッキングロボットのクリップで掴んだホースジョイントの中心と双眼カメラの視野中心の距離と同じであり、前記第三のARUCOコードは、ホースドッキングロボットの6軸ロボットアームの位置姿勢を調整するように導いて、高所作業ロボットのホースドッキング口の正確な位置決めを行うために用いられることを特徴とする、請求項4に記載のホースドッキングロボット。
【請求項6】
双眼カメラを利用してドッキング先ホースドッキング口の位置決め識別を行い、6軸ロボットアームをドッキング位置姿勢に変換するように導いて、ホースジョイントとホースドッキング口とのドッキングを行うプロセスは、
ドッキングエリアを到着した後、ホースドッキングロボットがホースジョイントを掴み、6軸ロボットアームを展開して予備ドッキング位置姿勢に進入するステップS1と、
予備ドッキング位置姿勢において、ホースドッキングロボットの双眼カメラで撮影した位置画像に基づいて、高所作業ロボットとホースドッキングロボットとの相対方向角を算出し、ホースドッキングロボットを導いて正面から高所作業ロボットに接近し、位置決め第一予定位置に到着するステップS2と、
位置決め第一予定位置に到着した後、双眼カメラの視野をホースドッキング口に移動して、ホースドッキング口を視覚的に位置決めすることにより、6軸ロボットアームを導いてカメラ視野中心がホースドッキング口の中心位置に位置する前の位置決め第二予定位置に変換するステップS3と、
第三のARUCOコードとホースドッキング口の中心との相対位置に基づいて、6軸ロボットアームを導き、双眼カメラの視野中心を第三のARUCOコードの中心位置に移動し、ドッキングした位置決め第三予定位置を得るステップS4と、
位置決め第三予定位置に到着した後、ロボットアームが再度前向きに移動し、ホースジョイントをホースドッキング口に挿入し、信頼的なドッキングすることを実現するステップS5とを含むことを特徴とする、請求項5に記載のホースドッキングロボット。
【請求項7】
ホースドッキングロボットが高所作業ロボットに対する相対方向角ψは、以下のとおりであり、
TIFF
2025138546000010.tif
14
149
式中、x1、z1は算出された第一のARUCOコードのX軸、Z軸の座標であり、x2、z2は算出された第二のARUCOコードのX軸、Z軸の座標であることを特徴とする、請求項6に記載のホースドッキングロボット。
【請求項8】
位置決め第一予定位置に到着した後、単眼測距アルゴリズムを用いてドッキング口を視覚的に位置決めを行ってホースドッキング口の中心の三次元座標を取得し、ロボットアームを制御してホースドッキング口前の位置決め第二予定位置に素早く移動させ、ホースドッキング口の中心をカメラ画像の中心に位置させることを特徴とする、請求項7に記載のホースドッキングロボット。
【請求項9】
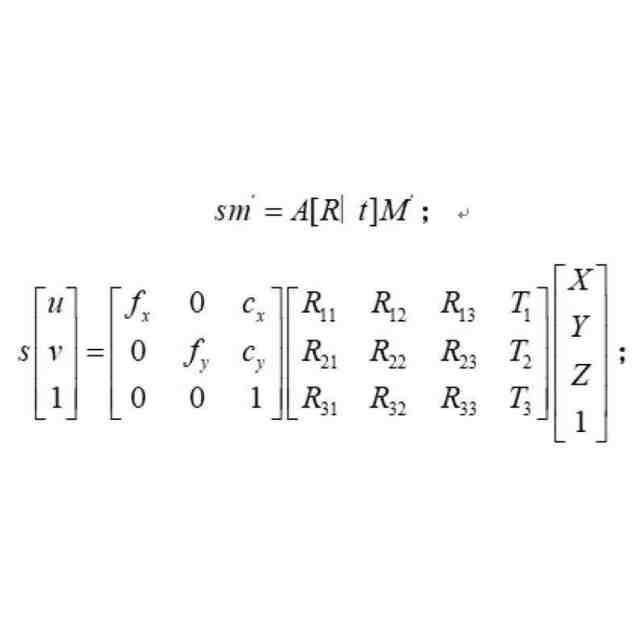
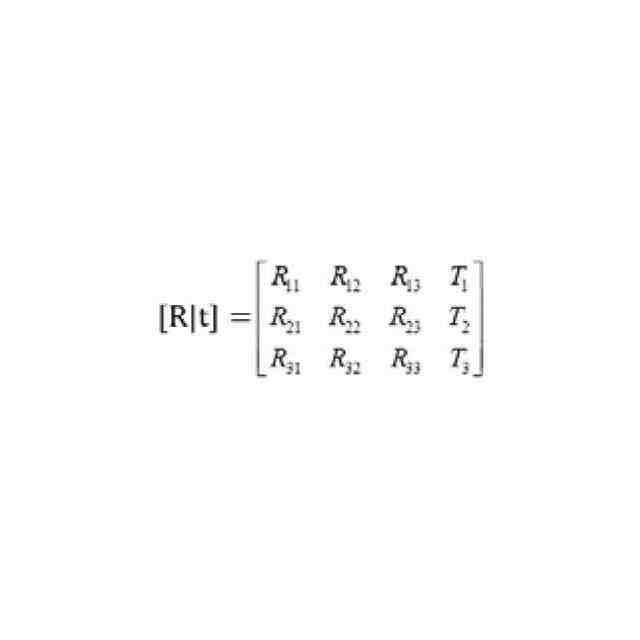
ホースドッキング口の視覚的に位置決めの三次元座標(x,y,z)は、以下のとおりであり、
TIFF
2025138546000011.tif
32
149
式中、i、jは算出されたホースドッキング口の中心のピクセル座標であり、dはホースドッキング口中心座標の深さであり、u
0
、v
0
はそれぞれカメラ内部パラメータにおけるx方向とy方向の視心であることを特徴とする、請求項8に記載のホースドッキングロボット。
【請求項10】
自動化ドッキング消火システムであって、ホースドッキングロボットと、高所作業ロボットと、ホースロールケースと、消火栓を含み、
ホースロールケースにおけるホースは消火栓と接続され、前記高所作業ロボットは消火位置に位置し、位置情報を前記ホースドッキングロボットに転送し、
前記ホースドッキングロボットは、高所作業ロボットの位置情報を受信し、ホースロールケースからホースジョイントを取り出し、ホースをドラッグして高所作業ロボットのドッキングエリアに移動させ、
ドッキングエリアにおいて、前記ホースドッキングロボットはホースジョイントを高所作業ロボットのホースドッキング口とドッキングし、高所作業ロボットの消火活動に水を供給し、
前記ホースドッキングロボットは、請求項1から請求項9のいずれか1項に記載のホースドッキングロボットであることを特徴とする自動化ドッキング消火システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、消防ロボットの技術分野に属し、具体的には、ホースドッキングロボット及び自動化ドッキング消火システムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
無人化電力、通信、石油化学工業等の業界では、その特殊な作業環境と高度自動化の設備により、一旦火災が発生すると、その危険係数及び複雑性が従来業界をはるかに超える。これらの業界では、火災は爆発を伴うことが多く、従来の消防システムは有効に動作することができない。また、無人化変電所、通信局、石油化学工業用パイプラインなどの施設の火災シーンは、より非常に困難であり、なぜなら、これらの施設の火災シーンでは、大量の可燃性、易爆発性物質に関する、処理が不適切であると、予想外の結果を招く可能性がある。
【0003】
火災過程において、消防設備とホースとのドッキングはキーステップの一つである。従来のドッキング方式は、通常、手動操作に依存するため、危険性が高いだけでなく、緊張した火災現場環境では、心理的ストレスや操作ミス等の原因により、エラーが発生しやすい。そこで、ドッキング作業を自動的に完了させることができるロボットシステムの開発が急務となっている。
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記の分析に鑑み、本発明の目的は、ホースドッキングロボット及び自動化ドッキング消火システムを提供することであり、従来技術における人工ホースドッキングの安全性が低いという問題を解決し、高度知能化及び自動化ロボットを利用し消防救助作業を行う目的を実現する
【課題を解決するための手段】
【0005】
本発明は、ホースドッキングロボットを開示し、ドッキングロボット本体と、6軸ロボットアームと、レーザレーダと、双眼カメラと、通信アンテナを含む。
【0006】
前記通信アンテナは、ドッキングロボット本体のトップカバーに取り付けられ、制御指令を受信し、及びドッキング先の位置を取得するために用いられる。
【0007】
前記レーザレーダは、ドッキングロボット本体の側壁に取り付けられ、ドッキングロボットの走行中に、ドッキング先位置を含む二次元シーンマップを構築するために用いられる。
【0008】
前記6軸ロボットアームの第一エンドは、ドッキングロボット本体のトップカバーに固定され、第二エンドには、ホースジョイントを掴むためのクリップが設けられる。
【0009】
前記双眼カメラは、ロボットアームの第二エンドに取り付けられ、双眼カメラの視野方向は、クリップで掴まれたホースジョイントの方向と一致する。
【0010】
ドッキングロボットはレーザレーダによって構築された二次元シーンマップを使ってドッキング先の位置を探し、消防ホースをドラッグしてドッキングエリアに到着させ、ドッキングエリアに到着させた後、ドッキングロボットは、クリップを使ってホースジョイントを掴み、双眼カメラを利用してドッキング先のホースドッキング口の位置を認識し、6軸ロボットアームをドッキング位置姿勢に変換するように導いて、ホースジョイントとホースドッキング口とのドッキングを行う。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
固定補助具
1か月前
個人
折りたたみ工具
22日前
株式会社三協システム
製函機
20日前
株式会社三協システム
移載装置
19日前
CKD株式会社
把持装置
21日前
株式会社不二越
ロボット操作装置
27日前
株式会社不二越
ロボットシステム
1か月前
株式会社ミクロブ
把持装置
21日前
日本精工株式会社
締結用工具
1か月前
太陽パーツ株式会社
アシストスーツ
22日前
SMC株式会社
着脱装置
20日前
トヨタ自動車株式会社
カプラ接続治具
1か月前
株式会社不二越
移動ロボットシステム
1日前
ARMA株式会社
ジョイントフレーム
1か月前
株式会社不二越
エッジ仕上げ装置
11日前
株式会社不二越
ロボットシステム
22日前
本田技研工業株式会社
装置
4日前
株式会社不二越
ロボットシステム
19日前
トヨタ自動車株式会社
歩行ロボット
25日前
積水ハウス株式会社
フィルム除去具
1か月前
株式会社不二越
垂直多関節ロボット
12日前
大和ハウス工業株式会社
ねじ回転工具
20日前
シンフォニアテクノロジー株式会社
搬送装置
1日前
ライオン株式会社
移載システム
13日前
ダイハツ工業株式会社
移載治具
1か月前
株式会社不二越
協働ロボットシステム
2か月前
株式会社不二越
ロボットシステム
1か月前
株式会社清水製作所
電動工具の吊下げ具
2か月前
倉敷紡績株式会社
ハンドおよびコネクタ接続方法
11日前
セイコーエプソン株式会社
ロボット
20日前
シヤチハタ株式会社
マーキング装置
25日前
シヤチハタ株式会社
マーキング装置
25日前
セイコーエプソン株式会社
ロボット
1か月前
コネクテッドロボティクス株式会社
保持システム
1か月前
セイコーエプソン株式会社
ロボット
1か月前
セイコーエプソン株式会社
ロボット
29日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ