TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025136027
公報種別
公開特許公報(A)
公開日
2025-09-19
出願番号
2024034184
出願日
2024-03-06
発明の名称
自律走行ロボット操作システム、自律走行ロボット操作方法、及びプログラム
出願人
学校法人 名古屋電気学園
,
トヨタ自動車株式会社
代理人
個人
主分類
B25J
13/00 20060101AFI20250911BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】音声入力と手書き入力を用いて、より簡便に自律走行ロボットを操作する自律走行ロボット操作システムを提供する。
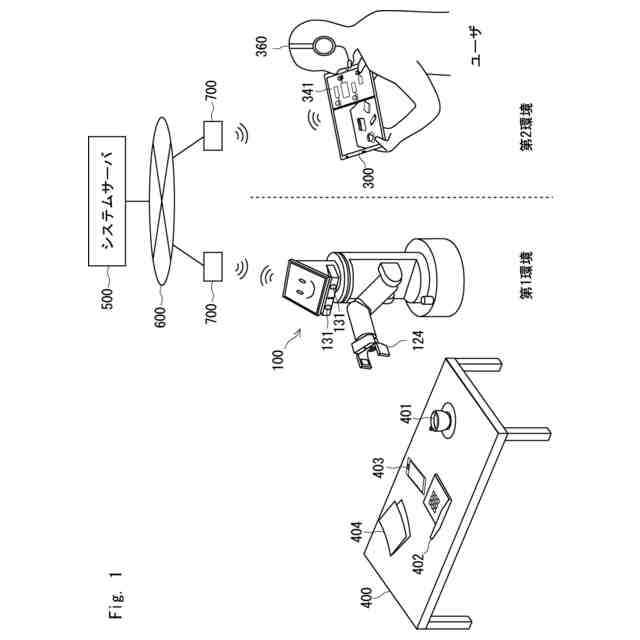
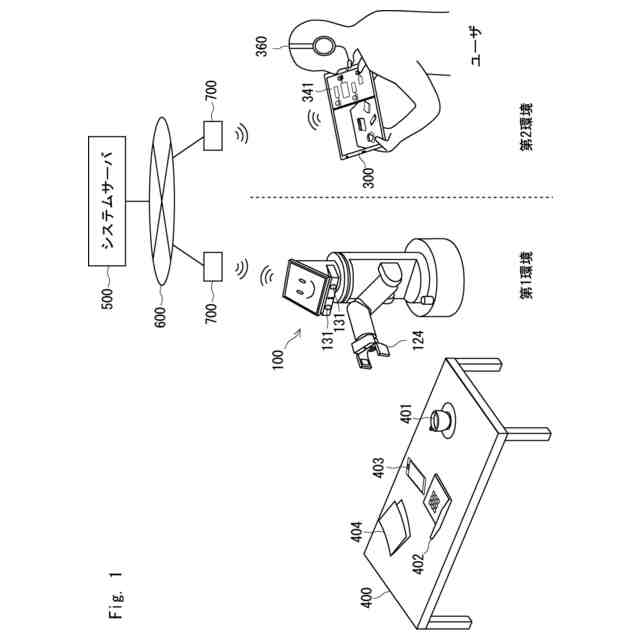
【解決手段】周囲を撮像し、被操作対象を操作する自律走行ロボットと、自律走行ロボットが撮像した画像を表示し、表示した画像に対する手書き入力を受け付ける手書き入力インターフェースと、被操作対象に対する音声入力を受け付ける音声入力インターフェースと、を備え、手書き入力と音声入力の指示に従って被操作対象を操作するように、自律走行ロボットを操作する、自律走行ロボット操作システムを提供する。
【選択図】図1
特許請求の範囲
【請求項1】
周囲を撮像し、被操作対象を操作する自律走行ロボットと、
前記自律走行ロボットが撮像した画像を表示し、表示した前記画像に対する手書き入力を受け付ける手書き入力インターフェースと、
前記被操作対象に対する音声入力を受け付ける音声入力インターフェースと、を備え、
前記手書き入力と前記音声入力の指示に従って前記被操作対象を操作するように、前記自律走行ロボットを操作する、自律走行ロボット操作システム。
続きを表示(約 700 文字)
【請求項2】
前記音声入力インターフェースは、音声を入力し、前記音声を認識して動作を出力する機械学習された音声認識部を用い、対話して前記自律走行ロボットの動作を入力する、請求項1に記載の自律走行ロボット操作システム。
【請求項3】
前記音声入力インターフェースを用いて、前記画像に表示されていない前記被操作対象に対する指示を行う、請求項1に記載の自律走行ロボット操作システム。
【請求項4】
前記手書き入力インターフェースは、前記画像を入力し、前記画像の中の物体を推定して出力するように機械学習された物体推定部を用いて前記被操作対象を入力する、請求項1に記載の自律走行ロボット操作システム。
【請求項5】
前記手書き入力インターフェースを用いて、前記自律走行ロボットの軌道を入力する、請求項1に記載の自律走行ロボット操作システム。
【請求項6】
前記手書き入力インターフェースを用いて、動作の副詞的な操作を入力する、請求項1に記載の自律走行ロボット操作システム。
【請求項7】
前記自律走行ロボットの操作は、把持、切断、移動、ねじ固定、または溶接である、請求項1に記載の自律走行ロボット操作システム。
【請求項8】
手書き入力と音声入力の指示に従って被操作対象を操作するように、自律走行ロボットを操作する、自律走行ロボット操作方法。
【請求項9】
手書き入力と音声入力の指示に従って被操作対象を操作するように、自律走行ロボットを操作することを情報処理装置に実行させる、プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は自律走行ロボット操作システム、自律走行ロボット操作方法、及びプログラムに関する。
続きを表示(約 1,000 文字)
【背景技術】
【0002】
特許文献1に、手書き入力とテキストチャットによりエンドエフェクタを操作する遠隔操作システムが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2021-94604号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1の方法では、テキストチャットを手書きで行わなければならず手書き入力と操作が重なるため入力が複雑だった。そこで、本開示の目的は、音声入力と手書き入力を用いて、より簡便に自律走行ロボットを操作する自律走行ロボット操作システムを提供することである。
【課題を解決するための手段】
【0005】
本開示のロボット操作システムは、
周囲を撮像し、被操作対象を操作する自律走行ロボットと、
前記自律走行ロボットが撮像した画像を表示し、表示した前記画像に対する手書き入力を受け付ける手書き入力インターフェースと、
前記被操作対象に対する音声入力を受け付ける音声入力インターフェースと、を備え、
前記手書き入力と前記音声入力の指示に従って前記被操作対象を操作するように、前記自律走行ロボットを操作する、自律走行ロボット操作システムである。
【0006】
上記構成により、音声入力と手書き入力を用いて、より簡便に自律走行ロボットを操作する自律走行ロボット操作システムが提供される。
【0007】
本開示のロボット操作システムは、
前記音声入力インターフェースは、音声を入力し、前記音声を認識して動作を出力する機械学習された音声認識部を用い、対話して前記自律走行ロボットの動作を入力する、ことを特徴とする。
【0008】
上記構成は、人工知能(AI(Artificial Intelligence)を用いた音声認識の一例である。
【0009】
本開示のロボット操作システムは、
前記音声入力インターフェースを用いて、前記画像に表示されていない前記被操作対象に対する指示を行う、ことを特徴とする。
【0010】
上記構成により、直接画像に表示されていない被操作対象に対する指示ができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
固定補助具
1か月前
個人
折りたたみ工具
22日前
株式会社三協システム
製函機
20日前
株式会社三協システム
移載装置
19日前
CKD株式会社
把持装置
21日前
株式会社不二越
ロボット操作装置
27日前
株式会社不二越
ロボットシステム
1か月前
太陽パーツ株式会社
アシストスーツ
22日前
日本精工株式会社
締結用工具
1か月前
株式会社ミクロブ
把持装置
21日前
SMC株式会社
着脱装置
20日前
トヨタ自動車株式会社
カプラ接続治具
1か月前
株式会社不二越
移動ロボットシステム
1日前
ARMA株式会社
ジョイントフレーム
1か月前
株式会社不二越
ロボットシステム
22日前
本田技研工業株式会社
装置
4日前
株式会社不二越
エッジ仕上げ装置
11日前
株式会社不二越
ロボットシステム
19日前
株式会社不二越
垂直多関節ロボット
12日前
トヨタ自動車株式会社
歩行ロボット
25日前
積水ハウス株式会社
フィルム除去具
1か月前
シンフォニアテクノロジー株式会社
搬送装置
1日前
株式会社不二越
協働ロボットシステム
2か月前
ライオン株式会社
移載システム
13日前
ダイハツ工業株式会社
移載治具
1か月前
大和ハウス工業株式会社
ねじ回転工具
20日前
株式会社清水製作所
電動工具の吊下げ具
2か月前
株式会社不二越
ロボットシステム
1か月前
シヤチハタ株式会社
マーキング装置
25日前
セイコーエプソン株式会社
ロボット
1か月前
セイコーエプソン株式会社
ロボット
1か月前
倉敷紡績株式会社
ハンドおよびコネクタ接続方法
11日前
コネクテッドロボティクス株式会社
保持システム
1か月前
セイコーエプソン株式会社
ロボット
29日前
セイコーエプソン株式会社
ロボット
20日前
シヤチハタ株式会社
マーキング装置
25日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ