TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025131246
公報種別
公開特許公報(A)
公開日
2025-09-09
出願番号
2024028861
出願日
2024-02-28
発明の名称
MEMSセンサ
出願人
ローム株式会社
代理人
個人
,
個人
,
個人
主分類
G01P
15/08 20060101AFI20250902BHJP(測定;試験)
要約
【課題】MEMSセンサにおいて品質の向上を図る。
【解決手段】MEMSセンサは、基板と、基板に配置されたMEMS電極とを備える。MEMS電極は、基板に固定された固定電極、および固定電極に対して所定の検出方向に移動可能なように基板に接続された可動電極をそれぞれ有する2つのセンサ素子と、2つのセンサ素子の可動電極同士を機械的に連結する弾性を有する連結部とを備える。
【選択図】図1
特許請求の範囲
【請求項1】
基板と、
前記基板に配置されたMEMS電極と
を備え、
前記MEMS電極は、
前記基板に固定された固定電極、および前記固定電極に対して所定の検出方向に移動可能なように前記基板に接続された可動電極をそれぞれ有する2つのセンサ素子と、
前記2つのセンサ素子の前記可動電極同士を機械的に連結する弾性を有する連結部と
を備える、MEMSセンサ。
続きを表示(約 680 文字)
【請求項2】
前記連結部は、一方のセンサ素子の前記可動電極と他方のセンサ素子の前記可動電極との間の前記検出方向における相対的な位置の差を吸収するように、弾性変形可能である、請求項1に記載のMEMSセンサ。
【請求項3】
前記可動電極は、前記検出方向に弾性的に曲げ変形可能な弾性変形可能な可動スプリングを有し、
前記連結部は、前記検出方向に弾性的に曲げ変形可能な連結スプリングを有し、
前記連結スプリングの曲げ剛性は、前記可動スプリングの曲げ剛性よりも小さい、請求項1に記載のMEMSセンサ。
【請求項4】
前記連結部と前記2つのセンサ素子の前記可動電極とは、互いに同電位である、請求項1に記載のMEMSセンサ。
【請求項5】
前記連結部を、一方センサ素子の前記可動電極に接続された第1部分と、他方のセンサ素子の前記可動電極に接続された第2部分とに分断するとともに、前記第1部分と前記第2部分とを機械的に連結しつつ電気的に絶縁するアイソレーションジョイントを備える、請求項1に記載のMEMSセンサ。
【請求項6】
前記検出方向は、前記基板の厚み方向であり、
一方のセンサ素子において、加速度が印加されていない状態で、前記可動電極は、前記固定電極に対して前記厚み方向の一方側に撓んでおり、
他方のセンサ素子において、加速度が印加されていない状態で、前記固定電極は、前記可動電極に対して前記厚み方向の一方側に撓んでいる、請求項1に記載のMEMSセンサ。
発明の詳細な説明
【技術分野】
【0001】
本開示は、MEMSセンサに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1には、静電容量型加速度センサが開示されている。特許文献1の加速度センサは、半導体基板と、半導体基板に形成された2つのZ軸センサとを備える。各Z軸センサは、固定電極と、固定電極に対して振動可能な可動電極とを有しており、固定電極と可動電極との間の静電容量の変化が検出されることにより、Z軸方向の加速度が検出される。
【先行技術文献】
【特許文献】
【0003】
特開2012-088083号公報
【0004】
[概要]
特許文献1の加速度センサでは、2つの可動電極の共振周波数が互いに異なる場合、2つの可動電極の共振周波数のずれに起因して、加速度センサに加速度が印加されたときに2つの可動電極が互いに異なる挙動で振動することがある。加速度センサに加速度が印加されたときの2つの可動電極の挙動の違いに起因して、加速度センサの検出精度が低下し、加速度センサの品質が低下することがある。
【0005】
本開示は、MEMSセンサにおいて品質の向上を図ることを目的とする。
【0006】
本開示の一態様は、
基板と、
前記基板に配置されたMEMS電極と
を備え、
前記MEMS電極は、
前記基板に固定された固定電極、および前記固定電極に対して所定の検出方向に移動可能なように前記基板に接続された可動電極をそれぞれ有する2つのセンサ素子と、
前記2つのセンサ素子の前記可動電極同士を機械的に連結する弾性を有する連結部と
を備える、MEMSセンサを提供する。
【図面の簡単な説明】
【0007】
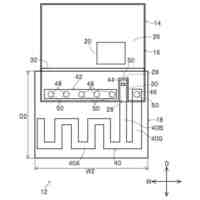
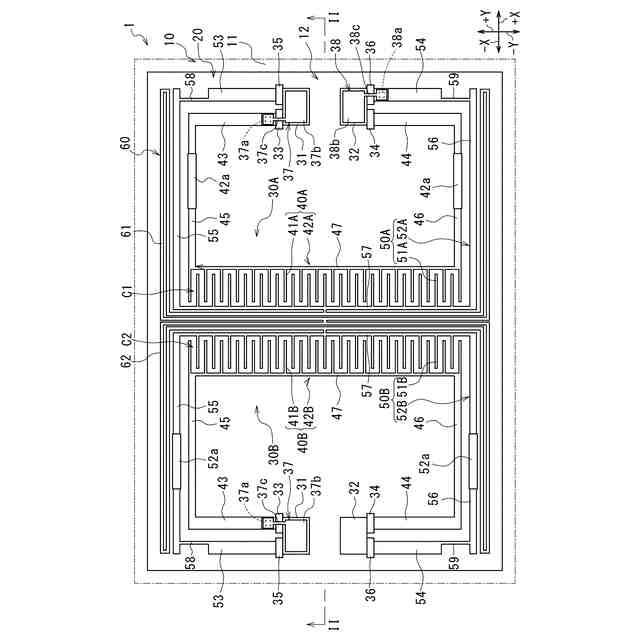
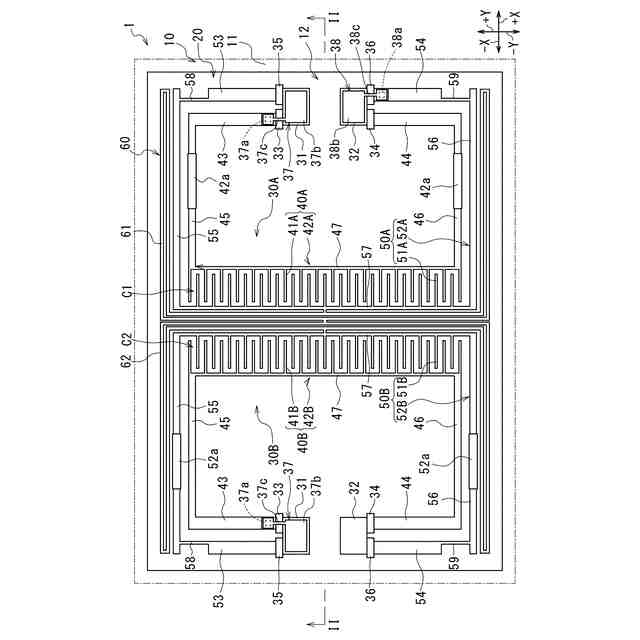
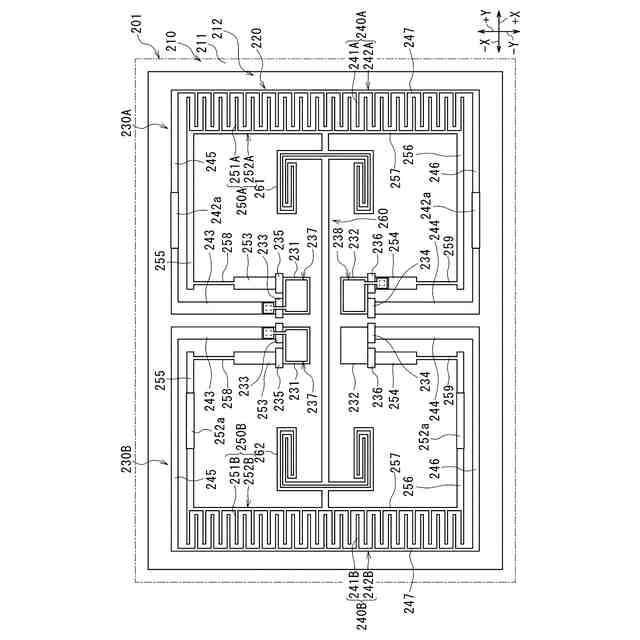
図1は、本開示の一実施形態に係る加速度センサの平面図である。
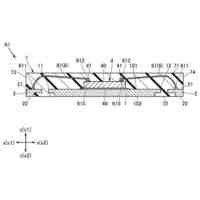
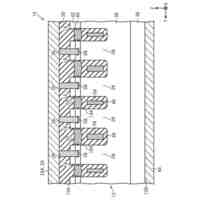
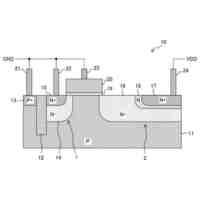
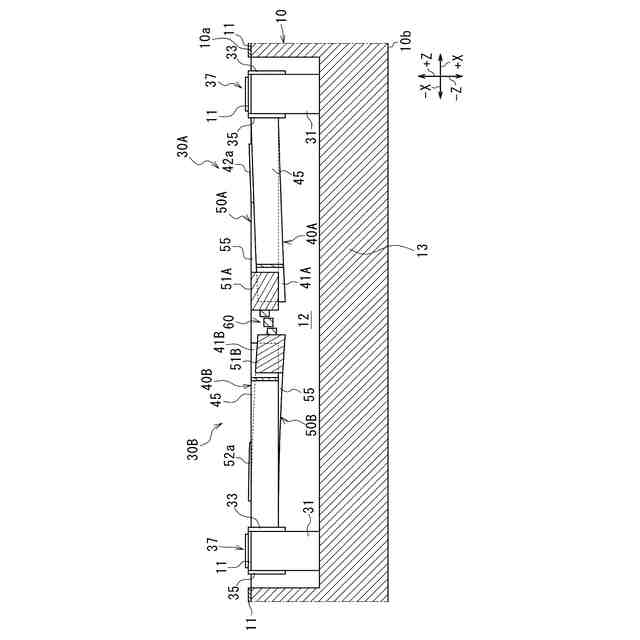
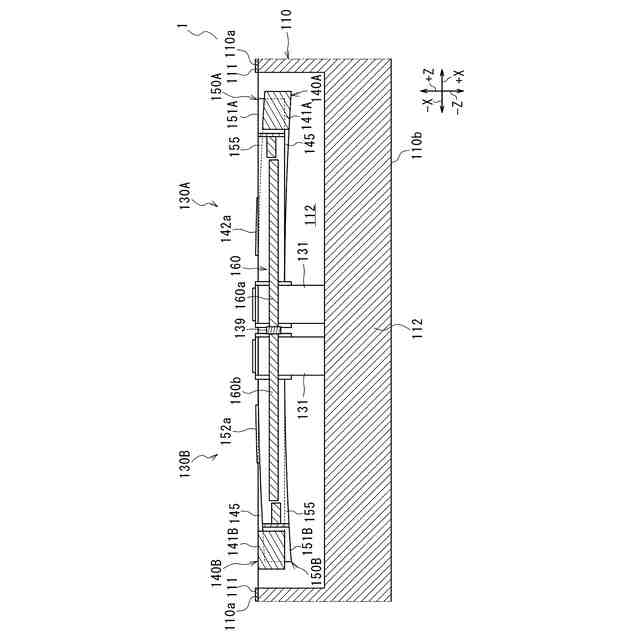
図2は、図1のII-II線に沿った断面図である。
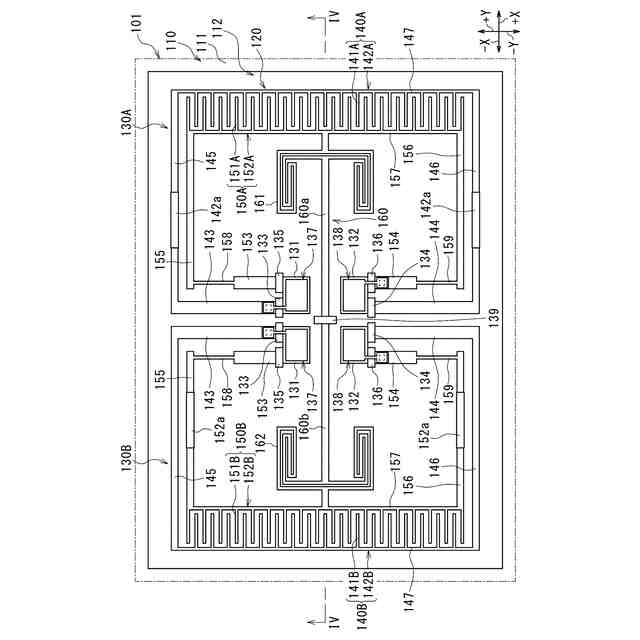
図3は、本開示の一実施形態の変形例に係る加速度センサの平面図である。
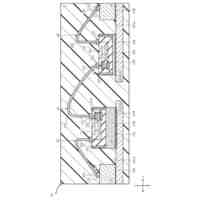
図4は、図3のIV-IV線に沿った断面図である。
図5は、本開示の一実施形態のさらなる変形例に係る加速度センサの平面図である。
【0008】
[詳細な説明]
以下、本開示の一実施形態に係るMEMS(Micro Electro Mechanical System)センサを添付図面に従って説明する。なお、以下の説明は、本質的に例示に過ぎず、本開示、その適用物、あるいは、その用途を制限することを意図するものではない。また、図面は模式的なものであり、各寸法の比率等は現実のものとは相違している。
【0009】
[第1実施形態]
図1は、本開示の第1実施形態に係るMEMSセンサ1を概略的に示す平面図である。図2は、図1のII-II線に沿った断面図である。本実施形態に係るMEMSセンサ1は、半導体微細加工技術を用いて製造される静電容量型加速度センサである
【0010】
以下の説明では、便宜上、図1に示す平面視においてMEMSセンサ1の各辺に沿った方向のうち図1の左右方向をX方向、図1の上下方向をY方向と称し、図2に示す断面視においてMEMSセンサ1の厚み方向(図2における上下方向)をZ方向と称する。特に、図1における、右側を+X方向、左側を-X方向、上側を+Y方向、下側を-Y方向とそれぞれ称する場合がある。図2における、上側を+Z方向、下側を-Z方向と称する場合がある。本実施形態では、X方向と、Y方向と、Z方向は互いに直交している。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
ローム株式会社
RAM
2日前
ローム株式会社
RAM
2日前
ローム株式会社
駆動回路
4日前
ローム株式会社
電源装置
2日前
ローム株式会社
発振回路
2日前
ローム株式会社
半導体装置
4日前
ローム株式会社
半導体装置
3日前
ローム株式会社
半導体装置
2日前
ローム株式会社
テスト回路
3日前
ローム株式会社
半導体装置
2日前
ローム株式会社
半導体装置
3日前
ローム株式会社
半導体装置
2日前
ローム株式会社
半導体装置
3日前
ローム株式会社
暗号化装置
3日前
ローム株式会社
半導体装置
3日前
ローム株式会社
半導体装置
5日前
ローム株式会社
半導体装置
4日前
ローム株式会社
半導体装置
2日前
ローム株式会社
半導体装置
4日前
ローム株式会社
半導体装置
2日前
ローム株式会社
無線通信装置
3日前
ローム株式会社
無線通信回路
4日前
ローム株式会社
時間測定回路
4日前
ローム株式会社
静電気保護素子
2日前
ローム株式会社
異常検知システム
2日前
ローム株式会社
フォトダイオード
4日前
ローム株式会社
検証装置及び検証方法
2日前
ローム株式会社
半導体装置及び補正方法
2日前
ローム株式会社
アンテナ付高周波モジュール
4日前
ローム株式会社
半導体装置及び半導体チップ
3日前
ローム株式会社
信号伝達装置、電子機器、車両
2日前
ローム株式会社
半導体装置、および通信システム
3日前
ローム株式会社
半導体装置、および通信システム
3日前
ローム株式会社
半導体装置及びレギュレータ装置
2日前
ローム株式会社
レギュレータ回路を備えた集積回路
2日前
ローム株式会社
音波処理装置、ソナー装置及び車両
3日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ