TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025128362
公報種別
公開特許公報(A)
公開日
2025-09-02
出願番号
2025101882,2023549198
出願日
2025-06-18,2021-09-21
発明の名称
作業装置
出願人
株式会社FUJI
代理人
弁理士法人アイテック国際特許事務所
主分類
H05K
13/02 20060101AFI20250826BHJP(他に分類されない電気技術)
要約
【課題】移動経路に設置される部材近傍での作業を可能とする。
【解決手段】検知部は、第1検知範囲と、第1検知範囲よりも作業装置本体の進行方向外側を検知範囲として含む第2検知範囲と、を有する。受光器は、作業装置本体の移動経路上に設けられる部材に設置される投光器からの光を受光可能で、投光器と受光器との間に第3検知範囲を有する。作業装置は、第2検知領域内において干渉物が検知されない場合には、作業装置本体の周囲を第1検知範囲に設定する。そして、第1検知範囲内において干渉物が検知されると、作業装置本体の移動を制限する。一方、作業装置は、第2検知範囲内において干渉物が検知された場合には、作業装置本体の周囲のうち第3検知範囲を含まない範囲を第1検知範囲に設定する。そして、第1検知範囲内において干渉物が検知されるか受光器により第3検知範囲において干渉物が検知されると、作業装置本体の移動を制限する。
【選択図】図11
特許請求の範囲
【請求項1】
複数の実装装置が並ぶ実装ラインにおいて前記実装装置に対して作業を行なう作業装置であって、
作業装置本体と、
前記作業装置本体を移動させる移動装置と、
前記作業装置本体に設けられ、第1検知範囲と、少なくとも前記第1検知範囲よりも前記作業装置本体の進行方向外側を検知範囲として含む第2検知範囲と、を有し、前記第1および第2検知範囲内においてそれぞれ干渉物の有無を検知する検知部と、
前記作業装置本体に設けられ、前記作業装置本体の移動経路上に設けられる部材に設置される投光器からの光を受光可能な受光器であって、前記投光器と前記受光器との間を第3検知範囲として受光状態に基づいて干渉物の有無を検知する受光器と、
前記作業装置本体が移動するよう前記移動装置を制御し、前記検知部により前記第2検知領域内において干渉物が検知されない場合には前記作業装置本体の周囲を前記第1検知範囲に設定し前記検知部により前記第1検知範囲内において干渉物が検知されたときに前記作業装置本体の移動を制限し、前記検知部により前記第2検知範囲内において干渉物が検知された場合には前記作業装置本体の周囲のうち前記第3検知範囲を含まない範囲を前記第1検知範囲に設定し前記検知部により前記第1検知範囲内において干渉物が検知されるか前記受光器により前記第3検知範囲内において干渉物が検知されたときに前記作業装置本体の移動を制限する制御部と、
を備える作業装置。
続きを表示(約 810 文字)
【請求項2】
請求項1に記載の作業装置であって、
前記制御部は、前記検知部により前記第2検知範囲内において干渉物が検知された場合には、前記第2検知範囲における当該干渉物の検知位置に応じて前記第1検知範囲と前記第3検知範囲とを設定する、
作業装置。
【請求項3】
複数の実装装置が並ぶ実装ラインと、
作業装置本体と、前記作業装置本体を移動させる移動装置と、を有し、前記実装装置に対して作業を行なう作業装置と、
前記作業装置本体の移動経路上に設けられる部材に設置される投光器と、
を備え、
前記作業装置は、
前記作業装置本体に設けられ、第1検知範囲と、少なくとも前記第1検知範囲よりも前記作業装置本体の進行方向外側を検知範囲として含む第2検知範囲と、を有し、前記第1および第2検知範囲内においてそれぞれ干渉物の有無を検知する検知部と、
前記作業装置本体に設けられ、前記投光器からの光を受光可能な受光器であって、前記投光器と前記受光器との間を第3検知範囲として受光状態に基づいて干渉物の有無を検知する受光器と、
前記作業装置本体が移動するよう前記移動装置を制御し、前記検知部により前記第2検知領域内において干渉物が検知されない場合には前記作業装置本体の周囲を前記第1検知範囲に設定し前記検知部により前記第1検知範囲内において干渉物が検知されたときに前記作業装置本体の移動を制限し、前記検知部により前記第2検知範囲内において干渉物が検知された場合には前記作業装置本体の周囲のうち前記第3検知範囲を含まない範囲を前記第1検知範囲に設定し前記検知部により前記第1検知範囲内において干渉物が検知されるか前記受光器により前記第3検知範囲内において干渉物が検知されたときに前記作業装置本体の移動を制限する制御部と、
を含む実装システム。
発明の詳細な説明
【技術分野】
【0001】
本明細書は、作業装置および実装システムについて開示する。
続きを表示(約 3,100 文字)
【背景技術】
【0002】
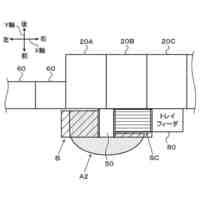
従来、複数の部品実装装置が並ぶ生産ラインにおいて、ラインに沿って移動して各部品実装装置に必要なテープフィーダを補給したり使用済みのテープフィーダを回収したりするローダ(作業装置)を備えるものが提案されている(例えば、特許文献1参照)。部品実装装置には、ローダによりテープフィーダが着脱可能に装着されると共に、当該部品実装装置から前方にはみ出してローダの走行路を塞ぐようにトレイフィーダが着脱可能に装着される。ローダは、ローダ周囲の干渉物を検知する監視センサ(レーザスキャナ)の他に、受光器を備える。受光器は、トレイフィーダに設置される投光器との組み合わせによりセーフティカーテンを構成し、投光器と受光器との間の干渉物の有無を監視する。ローダは、受光器により投光器からの光(セーフティカーテン)が検知されたか否かを判定し、セーフティカーテンが検知されないときには、監視センサのセンサ監視エリアをローダ周囲のエリア1に設定する。そして、ローダは、走行中にエリア1内で干渉物が検知されると、干渉物が検知されなくなるまで走行を停止する。一方、ローダは、セーフティカーテンが検知されたと判定すると、ローダとトレイフィーダとの間の距離を計算し、計算した距離が所定距離未満である場合に、ローダがトレイフィーダに近接した際に監視センサがトレイフィーダを検知しないようにセンサ監視エリアをエリア1よりも狭いエリア2に設定する。そして、ローダは、走行中にエリア2内とセーフティカーテン内のいずれかで干渉物が検知されると、干渉物が検知されなくなるまで走行を停止する。これにより、ローダは、走行路上の干渉物の検知を適切に行なうことができると共に、トレイフィーダ近傍まで近づいて必要な作業を行なうことができる。
【先行技術文献】
【特許文献】
【0003】
国際公開第2019/016924号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述したシステムでは、センサ監視エリアを切り替えるために、受光器によりセーフティカーテンが検知されたか否かの判定に加えて、トレイフィーダの位置を通信によって取得してローダとトレイフィーダとの距離を計算する必要があり、処理が複雑化する。
【0005】
本開示は、簡易な処理により周囲における干渉物の有無を監視しつつ移動経路に設置される部材近傍での作業を可能とすることを主目的とする。
【課題を解決するための手段】
【0006】
本開示は、上述の主目的を達成するために以下の手段を採った。
【0007】
本開示の作業装置は、
複数の実装装置が並ぶ実装ラインにおいて前記実装装置に対して作業を行なう作業装置であって、
作業装置本体と、
前記作業装置本体を移動させる移動装置と、
前記作業装置本体に設けられ、第1検知範囲と、少なくとも前記第1検知範囲よりも前記作業装置本体の進行方向外側を検知範囲として含む第2検知範囲と、を有し、前記第1および第2検知範囲内においてそれぞれ干渉物の有無を検知する検知部と、
前記作業装置本体に設けられ、前記作業装置本体の移動経路上に設けられる部材に設置される投光器からの光を受光可能な受光器であって、前記投光器と前記受光器との間を第3検知範囲として受光状態に基づいて干渉物の有無を検知する受光器と、
前記作業装置本体が移動するよう前記移動装置を制御し、前記検知部により前記第2検知領域内において干渉物が検知されない場合には前記作業装置本体の周囲を前記第1検知範囲に設定し前記検知部により前記第1検知範囲内において干渉物が検知されたときに前記作業装置本体の移動を制限し、前記検知部により前記第2検知範囲内において干渉物が検知された場合には前記作業装置本体の周囲のうち前記第3検知範囲を含まない範囲を前記第1検知範囲に設定し前記検知部により前記第1検知範囲内において干渉物が検知されるか前記受光器により前記第3検知範囲内において干渉物が検知されたときに前記作業装置本体の移動を制限する制御部と、
を備えることを要旨とする。
【0008】
この本開示の作業装置では、作業装置本体に検知部と受光器とを備える。検知部は、第1検知範囲と、少なくとも第1検知範囲よりも作業装置本体の進行方向外側を検知範囲として含む第2検知範囲と、を有する。受光器は、作業装置本体の移動経路上に設けられる部材に設置される投光器からの光を受光可能で、投光器と受光器との間に第3検知範囲を有する。作業装置は、検知部により第2検知領域内において干渉物が検知されない場合には、作業装置本体の周囲を第1検知範囲に設定する。そして、検知部により当該第1検知範囲内において干渉物が検知されると、作業装置本体の移動を制限する。一方、作業装置は、検知部により第2検知範囲内において干渉物が検知された場合には、作業装置本体の周囲のうち第3検知範囲を含まない範囲を第1検知範囲に設定する。そして、検知部により当該第1検知範囲内において干渉物が検知されるか受光器により第3検知範囲において干渉物が検知されると、作業装置本体の移動を制限する。これにより、簡易な処理により周囲における干渉物の有無を監視しつつ作業装置本体の移動経路に設置される部材近傍での作業を可能とすることができる。
【0009】
本開示の実装システムは、
複数の実装装置が並ぶ実装ラインと、
作業装置本体と、前記作業装置本体を移動させる移動装置と、を有し、前記実装装置に対して作業を行なう作業装置と、
前記作業装置本体の移動経路上に設けられる部材に設置される投光器と、
を備え、
前記作業装置は、
前記作業装置本体に設けられ、第1検知範囲と、少なくとも前記第1検知範囲よりも前記作業装置本体の進行方向外側を検知範囲として含む第2検知範囲と、を有し、前記第1および第2検知範囲内においてそれぞれ干渉物の有無を検知する検知部と、
前記作業装置本体に設けられ、前記投光器からの光を受光可能な受光器であって、前記投光器と前記受光器との間を第3検知範囲として受光状態に基づいて干渉物の有無を検知する受光器と、
前記作業装置本体が移動するよう前記移動装置を制御し、前記検知部により前記第2検知領域内において干渉物が検知されない場合には前記作業装置本体の周囲を前記第1検知範囲に設定し前記検知部により前記第1検知範囲内において干渉物が検知されたときに前記作業装置本体の移動を制限し、前記検知部により前記第2検知範囲内において干渉物が検知された場合には前記作業装置本体の周囲のうち前記第3検知範囲を含まない範囲を前記第1検知範囲に設定し前記検知部により前記第1検知範囲内において干渉物が検知されるか前記受光器により前記第3検知範囲内において干渉物が検知されたときに前記作業装置本体の移動を制限する制御部と、
を備えることを要旨とする。
【0010】
この本開示の実装システムでは、上述した本開示の作業装置を備えるため、簡易な処理により周囲における干渉物の有無を監視しつつ作業装置本体の移動経路に設置される部材近傍での作業を可能とすることができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社FUJI
制御盤
2か月前
株式会社FUJI
工作機械
1か月前
株式会社FUJI
工作機械
1か月前
株式会社FUJI
部品実装機
1か月前
株式会社FUJI
テープガイド
15日前
株式会社FUJI
対基板作業機
2か月前
株式会社FUJI
測定値処理装置
2か月前
株式会社FUJI
テープフィーダ
2か月前
株式会社FUJI
フィーダ制御装置
2か月前
株式会社FUJI
ストッカシステム
2か月前
株式会社FUJI
生産計画作成装置
24日前
株式会社FUJI
印刷装置及び印刷方法
1日前
株式会社FUJI
造形装置および造形方法
1か月前
株式会社FUJI
制御装置、印刷装置及び制御方法
9日前
株式会社FUJI
製造方法及び3次元造形システム
1か月前
株式会社FUJI
部品実装機及びテープ回収方法。
2か月前
株式会社FUJI
印刷装置及び印刷装置の制御方法
2か月前
株式会社FUJI
制御装置、印刷装置及び制御方法
1日前
株式会社FUJI
テープ剥離装置およびテープフィーダ
2か月前
株式会社FUJI
部品データの生成方法および生成装置
17日前
株式会社FUJI
電子部品装着方法、及び電子部品装着装置
11日前
株式会社FUJI
部品実装機および異物の有無を判定する方法
10日前
株式会社FUJI
造形装置およびディスペンサヘッドの制御方法
1か月前
株式会社FUJI
印刷品質管理システムおよび印刷品質管理方法
23日前
株式会社FUJI
アラーム情報表示装置、及びアラーム情報表示システム
1か月前
株式会社FUJI
作業装置
22日前
株式会社FUJI
交換装置
2か月前
株式会社FUJI
印刷装置
1日前
株式会社FUJI
作業装置
2か月前
株式会社FUJI
サイクルタイム表示装置、及びサイクルタイム表示システム
1か月前
株式会社FUJI
実装システム
2か月前
株式会社FUJI
異物除去方法
2か月前
株式会社FUJI
テープフィーダ
1日前
株式会社FUJI
部品実装ライン
24日前
株式会社FUJI
部品供給フィーダ、部品供給フィーダの管理システム及び管理方法
22日前
株式会社FUJI
対基板作業機、および雄型コネクタと雌型コネクタとの接続維持方法
1か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ