TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025106522
公報種別
公開特許公報(A)
公開日
2025-07-15
出願番号
2025066004,2023169010
出願日
2025-04-14,2019-06-11
発明の名称
自動収納回収システム向けの容器荷役車両およびドローンの操作を制御する方法およびシステム
出願人
アウトストア・テクノロジー・エーエス
,
AUTOSTORE TECHNOLOGY AS
代理人
個人
,
個人
,
個人
,
個人
主分類
B65G
1/04 20060101AFI20250708BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
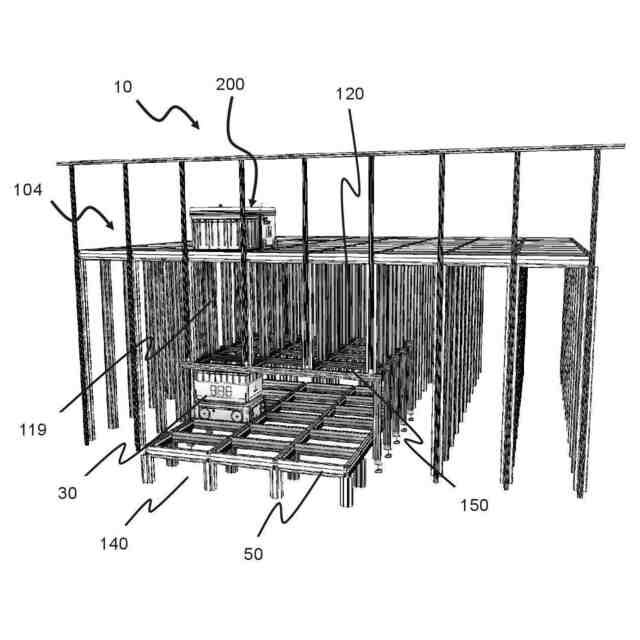
【課題】自動収納回収システムの下方および頂部でそれぞれ動作するドローンと容器荷役車両との間の相互作用を制御し調整する、方法、システム、およびコンピュータプログラムを提供する。
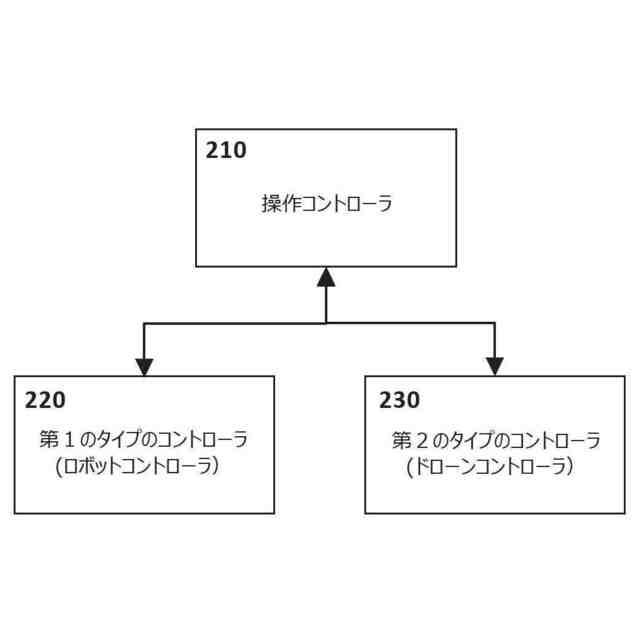
【解決手段】ドローンおよび容器荷役車両200が、それらの間で収納容器106を移送するときに最小限のまたは最もコスト効率が良い待ち時間を有するのを確保することである。種々のステップが、各容器荷役車両200の第1のタイプのコントローラおよび各ドローンの第2のタイプのコントローラと通信する操作コントローラによって実施され、タイミング情報が重要な要因である。
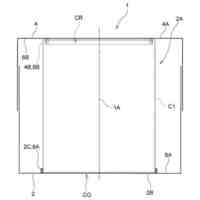
【選択図】図1
特許請求の範囲
【請求項1】
重み関数に基づいて、容器荷役車両(200)と遠隔操作されるドローン(30)との間で収納容器(106)を移送するための合計経過時間または待ち時間コストが最小限または最適になるように、前記容器荷役車両および前記ドローンの動作を制御する方法であって、前記ドローン(30)が、収納容器(106)をグリッドセル(122)に収納する収納グリッド(104)を規定するフレームワーク構造(100)を有する自動収納回収システム(10)の下方のレベルで動作し、前記収納容器(106)が前記収納グリッド(104)の頂部上を走行する容器荷役車両(200)によって収納および回収され、各容器荷役車両(200)内の第1のタイプのコントローラ(220)および各ドローン(30)内の第2のタイプのコントローラ(230)と通信している少なくとも1つの操作コントローラ(210)によって、
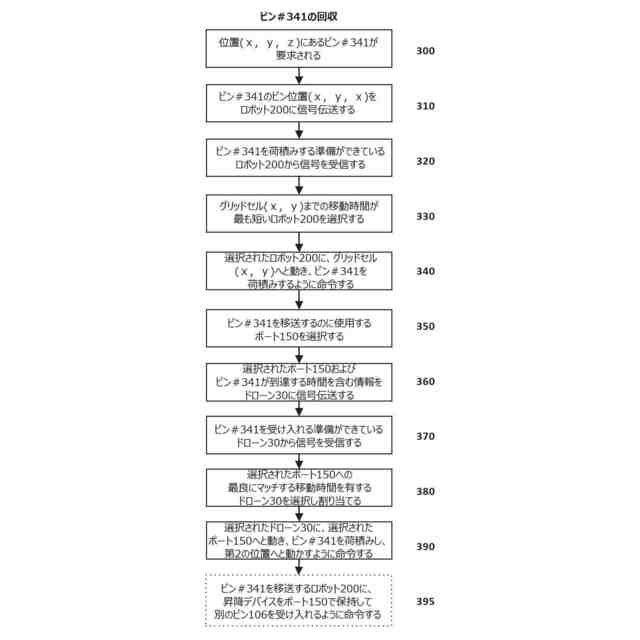
指定された収納容器(106)が収納コラム(105)および対応するグリッドセル(122)からドローン(30)へと移送されるべきであるとき、
割り当てられた容器荷役車両(200)の前記第1のタイプのコントローラ(220)に命令を送信することによって、前記収納容器(106)を前記グリッドセル(122)から荷積みし、特定された空の出庫コラム(119、120)の下端部に位置する選択されたポート(150)に下ろすように、前記容器荷役車両を割り当て、命令するステップと、
前記容器荷役車両(200)を前記グリッドセル(122)へと動かし、前記収納容器(106)を荷積みし、前記ポート(150)がある前記出庫コラム(119、120)のグリッドセル(122)へと搬送するステップと、
第1の位置にある前記選択されたポート(150)、および前記収納容器(106)が前記ポート(150)においていつ利用可能になるかの情報を含む信号を、前記ドローン(30)に送信するステップと、
前記ドローン(30)からの応答に基づいて、前記指定された収納容器(106)を回収するように、ドローン(30)を割り当て、命令するステップと、
前記ドローン(30)を前記第1の位置にある前記ポート(150)へと動かし、前記収納容器(106)を荷積みし、第2の位置へと運ぶステップ、
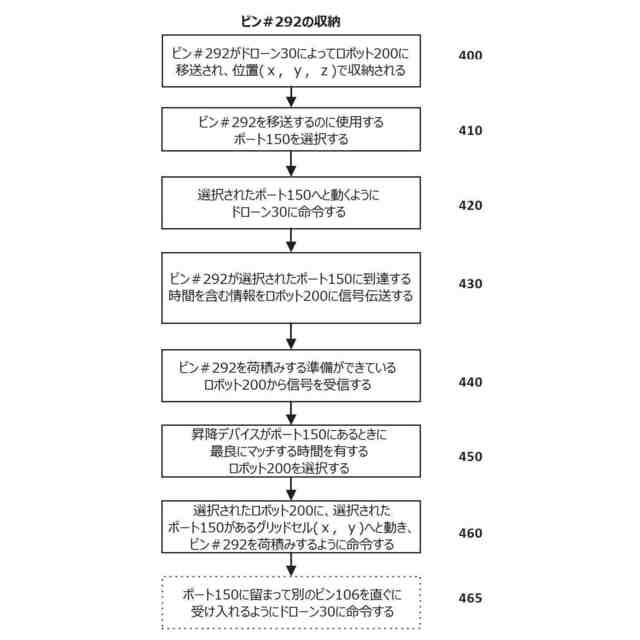
ならびに/あるいは、指定された収納容器(106)が、対応する収納コラム(105)に収納するために、ドローン(30)によってグリッドセル(122)へと移送されるべきであるとき、
前記第1の位置にあるどのポート(150)が使用されるべきかを決定するステップと、
前記収納容器(106)を、前記第2の位置を表す現在位置から前記第1の位置にある前記ポート(150)へと搬送するために、命令を前記ドローン(30)の前記第2のタイプのコントローラ(230)に送信するステップと、
前記ドローン(30)を前記第2の位置から前記第1の位置にある前記ポート(150)へと動かすステップと、
前記収納容器がそこから回収される前記ポート(150)の情報を含む信号を前記容器荷役車両(200)に送信するステップと、
前記容器荷役車両(200)からの応答に基づいて、前記指定された収納容器(106)を前記第1の位置にある前記ポート(150)から持ち上げて回収するために、容器荷役車両(200)を割り当て、命令するステップと、
前記収納容器(106)を前記出庫コラム(119、120)を通して前記ポート(150)から持ち上げ、前記収納容器(106)を搬送する前記容器荷役車両(200)を、前記指定された収納容器(106)が移送されるべき前記収納コラム(105)に対応するグリッドセル(122)へと動かすステップとが実施される、方法。
続きを表示(約 1,300 文字)
【請求項2】
指定された収納容器(106)が前記ドローン(30)および前記容器荷役車両(20
0)によってグリッドセル(122)との間で移送されるべきであるとき、前記収納容器(106)を移送するのに利用可能な一連のポート(150)から選択される前記ポート(150)が、最も近い利用可能なポート(150)と前記収納容器(106)がその間で移送されるべき前記グリッドセル(122)との間の前記容器荷役車両(200)の最良にマッチする移動時間と、空のドローン(30)のポート(150)までの移動時間とのトレードオフに基づく、請求項1に記載の方法。
【請求項3】
指定された収納容器(106)が前記ドローン(30)および前記容器荷役車両(200)によってグリッドセル(122)に移送されるべきであるとき、前記指定された収納容器(106)を前記第1の位置にある前記ポート(150)から回収するのに割り当てられる前記容器荷役車両(200)は、現在利用可能なものであり、かつ前記ポートへの最良にマッチする移動時間であって昇降デバイスを現在位置から前記ポート(150)へと下ろすための最短時間を有するものである、請求項1に記載の方法。
【請求項4】
指定された収納容器(106)が前記容器荷役車両(200)および前記ドローン(30)によってグリッドセル(122)から回収されるべきであるとき、前記指定された収納容器(106)を前記第1の位置にある前記ポート(150)から回収するのに割り当てられる前記ドローン(30)は、現在利用可能なものであり、かつ現在位置から前記ポート(150)への最良にマッチする移動時間を有するものである、請求項1に記載の方法。
【請求項5】
重み関数に基づいて、容器荷役車両(200)と遠隔操作されるドローン(30)との間で収納容器(106)を移送するための合計経過時間または待ち時間コストが最小限または最適になるように、前記容器荷役車両および前記ドローンの動作を制御するシステムであって、前記ドローン(30)が、収納容器(106)をグリッドセル(122)に収納する収納グリッド(104)を規定するフレームワーク構造(100)を有する自動収納回収システム(10)の下方のレベルで動作し、前記収納容器(106)が前記収納グリッド(104)の頂部上を走行する容器荷役車両(200)によって収納および回収され、少なくとも1つの操作コントローラ(210)が、各容器荷役車両(200)内の第1のタイプのコントローラ(220)および各ドローン(30)内の第2のタイプのコントローラ(230)と通信しており、前記コントローラが、請求項1から4に記載の方法を実施するように適合された、システム。
【請求項6】
コンピュータによって実行されると、容器荷役車両(200)と遠隔操作されるドローン(30)との間で収納容器(106)を移送するときの前記容器荷役車両および前記ドローンの動作を制御する、請求項1から4に記載の方法を実施する、コンピュータプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自動収納回収システムの下側部分における第1の位置に位置するポートを備える、グリッド構造および出庫システムを有する自動収納回収システムに関する。収納容器を、ポートと、典型的にはピッキングステーションである第2の位置との間で搬送するのに、ドローンが使用される。より具体的には、本発明は、自動収納回収システムの下方と頂部とでそれぞれ動作する、ドローンと容器荷役車両との間の相互作用を制御し調整する、方法、システム、およびコンピュータプログラムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
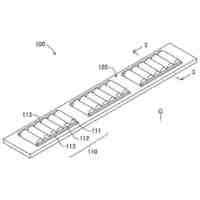
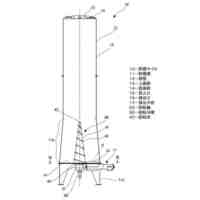
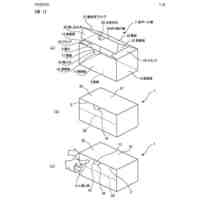
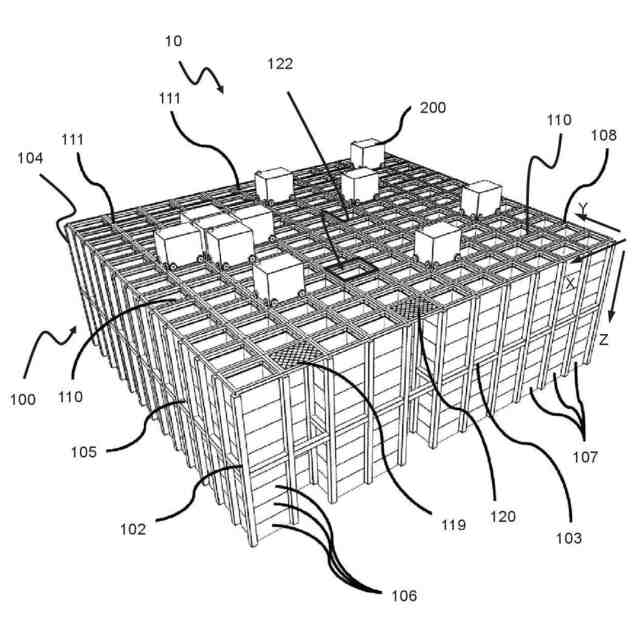
図1は、フレームワーク構造100を有する典型的な従来技術の自動収納回収システム10を開示しており、ロボットとも呼ばれる容器荷役車両200が、フレームワーク構造100の頂部にあるレールシステム108上を走行するときに、自動収納回収システム10を操作する。
【0003】
フレームワーク構造100は、複数の垂直部材102と、複数の垂直部材102を支持する任意の複数の水平部材103とを備える。部材102、103は、典型的には、金属、例えばアルミニウム押出形材で作られてもよい。
【0004】
フレームワーク構造100は、列状に配置された収納コラム105を備える収納グリッド104を規定し、収納コラム内で、ビンとしても知られる収納容器106が上下に積み重ねられてスタック107を形成する。各収納容器106は、典型的には、複数の品目(図示なし)を保持してもよい。
【0005】
自動収納回収システム10は、容器荷役車両200のためのレールシステム108を備える。レールシステム108は、収納グリッド104の頂部にわたってグリッドパターンで配置される。容器荷役車両200は、レールシステム108上を走行しており、収納容器106を上下させて収納コラム105から出し入れするとともに、収納容器106をレールシステム108上で搬送するように操作される。グリッドパターンを構成するグリッドセル122のうち1つの水平方向の範囲が、図1に太線で示されている。
【0006】
レールシステム108は、フレーム構造100の頂部をわたって通る第1の方向Xでの容器荷役車両200の動きをガイドするように配置された第1の平行なレールセット110と、第1の方向Xに垂直な第2の方向Yでの容器荷役車両200の動きをガイドする、第1のレールセット110に垂直に配置された第2の平行なレールセット111とを備える。このようにして、レールシステム108はグリッドコラムを規定し、その上を容器荷役車両200が収納コラム105の上方で横方向に、即ち水平なX-Y面に平行な面内を動くことができる。
【0007】
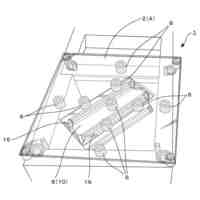
各容器荷役車両200は、車両本体と8つのホイール201のホイール構成とを備え、第1の4つのホイールセットによって、容器荷役車両200がX方向で横方向に動くことができ、残りの第2の4つのホイールセットによって、Y方向で横方向に動くことができる。ホイール構成の1つまたは両方のホイールセットを上下させることができ、それによって、第1のホイールセットおよび/または第2のホイールセットをそれぞれのレールセット110、111と係合させることができ、これは、容器荷役車両200の動きおよび方向を制御するコントローラによって規定される。
【0008】
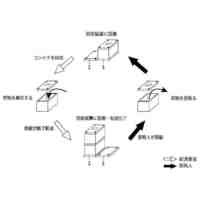
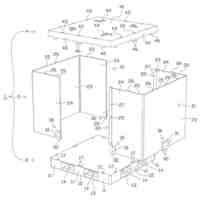
各容器荷役車両200は、収納容器106を垂直方向に搬送する、例えば収納容器106を収納コラム105から持ち上げ、収納容器106を収納コラム105内に下ろす、昇降デバイス(図示なし)を備える。昇降デバイスは、収納容器106を係合するように適合された、1つまたは複数の把持/係合デバイス(図示なし)を備える。把持/係合デバイスは、第1および第2の方向X、Yに直交する第3の方向Zで把持/係合デバイスの位置を調節するために、昇降デバイスによって車両200から下ろすことができる。
【0009】
各容器荷役車両200は、レールシステム108をわたって収納容器106を搬送するとき、収納容器106を受け入れ積み込むための、収納区画またはスペース(図示なし)を備える。収納スペースは、例えば、その内容を参照により本明細書に組み込むWO2014/090684A1に記載されているように、車両本体内の中央に配置された空洞を備えてもよい。
【0010】
あるいは、容器荷役車両200は、やはりその内容を参照により本明細書に組み込むNO317366に記載されているように、カンチレバー構造を有してもよい。
収納グリッド104では、ほとんどのグリッドコラムが収納コラム105であり、即ち、収納容器106がスタック107状に収納されるグリッドコラム105である。しかしながら、収納グリッド104は通常、少なくとも1つのグリッドコラムを有し、そのグリッドコラムは、収納容器106を収納するのには使用されず、代わりに、収納容器106に収納グリッド104の外部からアクセスするか、または収納グリッド104から出し入れすることができる第2の位置(図示なし)へと搬送することができるように、収納容器106を荷降ろしおよび/または荷積みするのに、容器荷役車両200によって使用される。当該分野内では、かかる位置は通常「ポート」と呼ばれ、ポートが位置するグリッドコラムは「出庫コラム」119と呼ばれることがある。容器荷役車両200の荷降ろしおよび荷積みポートは、「出庫コラムの上部ポート」119と呼ばれる。出庫コラムの反対側端部は「出庫コラムの下部ポート」と呼ばれる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
箱
9か月前
個人
包装体
10か月前
個人
収容箱
20日前
個人
ゴミ箱
9か月前
個人
コンベア
2か月前
個人
段ボール箱
4か月前
個人
段ボール箱
4か月前
個人
容器
6か月前
個人
ゴミ収集器
4か月前
個人
パウチ補助具
9か月前
個人
楽ちんハンド
2か月前
個人
角筒状構造体
2か月前
個人
折り畳み水槽
10か月前
個人
土嚢運搬器具
5か月前
個人
宅配システム
4か月前
個人
閉塞装置
7か月前
個人
コード類収納具
5か月前
個人
お薬の締結装置
3か月前
個人
ダンボール宝箱
10か月前
個人
圧縮収納袋
10か月前
株式会社コロナ
梱包材
2か月前
個人
把手付米袋
1か月前
個人
貯蔵サイロ
4か月前
株式会社和気
包装用箱
6か月前
個人
積み重ね用補助具
今日
個人
ゴミ処理機
6か月前
個人
蓋閉止構造
1か月前
個人
蓋閉止構造
1か月前
株式会社新弘
容器
9か月前
株式会社新弘
容器
5日前
株式会社新弘
容器
9か月前
個人
塗料容器用蓋
10か月前
個人
搬送システム
3か月前
三甲株式会社
蓋体
5か月前
個人
粘着テープ剥がし具
11か月前
個人
袋入り即席麺
4か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ