TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025100454
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2024221427
出願日
2024-12-18
発明の名称
ドアロック装置、電気機器及び制御方法
出願人
イリノイ トゥール ワークス インコーポレイティド
代理人
個人
,
個人
,
個人
,
個人
主分類
A47L
15/42 20060101AFI20250626BHJP(家具;家庭用品または家庭用設備;コーヒーひき;香辛料ひき;真空掃除機一般)
要約
【課題】本開示は、ドアロック装置のための制御方法に関する。
【解決手段】本制御方法は、電気機器のドアが閉位置に向かって動く過程において、ドアが開けられてできた間隙に障害物があるか否かを決定することと、間隙に障害物がある場合、所定の期間の間、第2の回転方向に回転するようにモーターを制御し、障害物が間隙から除去されるまでこのステップを繰り返すことと、間隙に障害物がない場合、第1の回転方向に回転するようにモーターを制御して、ドアが閉位置に動くことを可能にすることとを含む。本開示の制御方法は、食器洗浄機の自動ドア閉鎖過程の間に障害物(例えば、誤って間隙の中に手を伸ばしたユーザーの手)が挟み込まれることを防止することができる。
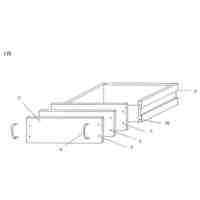
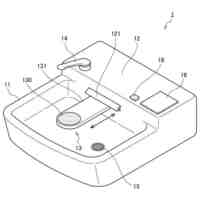
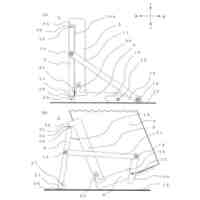
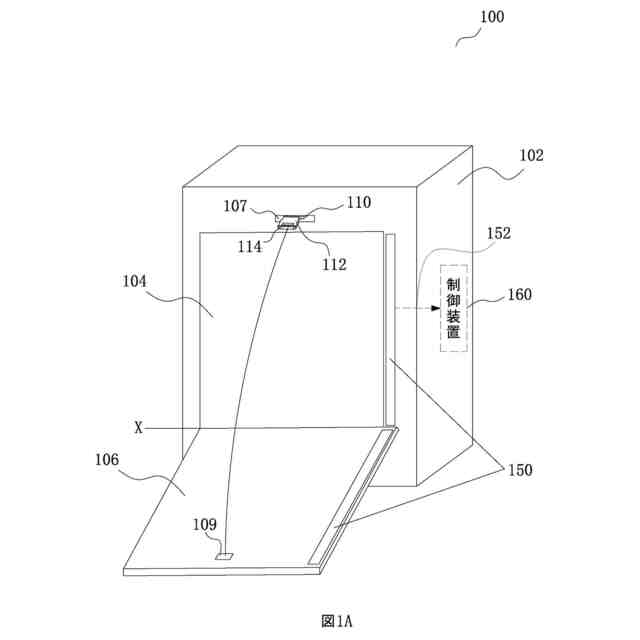
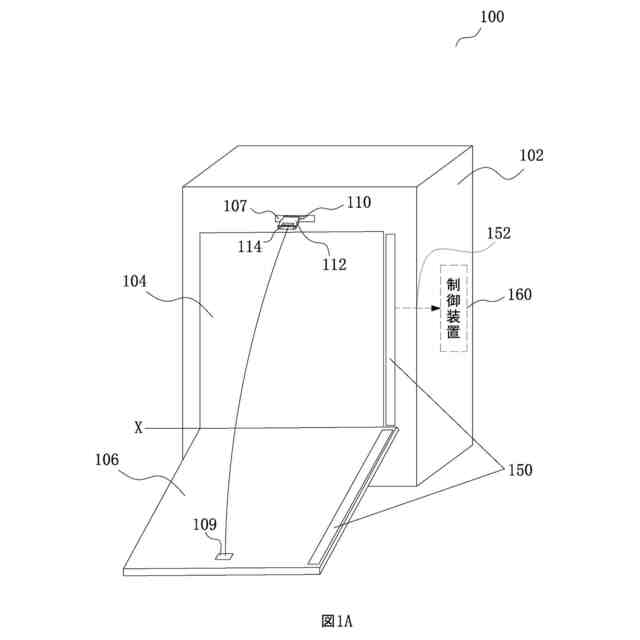
【選択図】図1A
特許請求の範囲
【請求項1】
ドアロック装置(110)のモーター(226)を制御する制御方法であって、前記モーター(226)は、ドアロックスライダー(112)を駆動して動かすように構成され、前記ドアロックスライダー(112)は、電気機器のドア(106)を作動させるように構成され、該制御方法は、
前記ドア(106)が非閉位置にある場合、前記ドアロックスライダー(112)が後退することを可能にするように、第1の回転方向に回転するように前記モーター(226)を制御して、前記ドア(106)を閉位置に向けて動かすこと(S01)と、
前記ドア(106)が前記閉位置に向かって動く過程において、前記ドア(106)が開けられてできた間隙(111)に障害物があるか否かを決定(S02)し、前記間隙(111)に障害物がある場合、第1の所定の期間の間、前記第1の回転方向とは反対の第2の回転方向に回転するように前記モーター(226)を制御し、前記第1の所定の期間が終了した後、前記第1の回転方向に回転するように前記モーター(226)を制御し、前記間隙(111)から前記障害物が除去されるまで、ステップS02における上述した動作を繰り返すことと、
前記ドア(106)を前記閉位置に動かすこと(S03)と、
を含む、制御方法。
続きを表示(約 2,600 文字)
【請求項2】
ステップS01において、手動介入がある場合、
前記手動介入が手動ドア開放であり、前記ドアロックスライダー(112)が前記ドア(106)から切り離されている場合、前記ドアロックスライダー(112)が後退することを可能にするように前記第1の回転方向に回転するように前記モーター(226)を制御し、前記ドア(106)が或る期間の間開位置に保たれた後に手動ドア閉鎖動作を実行し、前記手動ドア閉鎖動作が完了した後にステップS03に進むステップ(S01-1)、又は、
前記手動介入が手動ドア閉鎖である場合、前記第1の回転方向に回転するように前記モーター(226)を制御し、前記手動ドア閉鎖動作が完了した後にステップS03に進むステップ(S01-2)
を実行する、請求項1に記載の制御方法。
【請求項3】
ステップS02において、前記間隙(111)に障害物があるか否かが、前記モーター(226)の電流変化を測定することによって決定される、
請求項1に記載の制御方法。
【請求項4】
ステップS02において、前記間隙(111)に障害物があるか否かが、前記間隙(111)における赤外線信号、光電信号又は静電容量信号の変化を測定することによって決定される、
請求項1に記載の制御方法。
【請求項5】
前記制御方法は、ステップS01に先立ち、
前記ドア(106)を閉じ、前記ドア(106)が前記閉位置にある状態で食器洗浄動作を実行するステップであって、このとき、前記ドアロックスライダー(112)が後退位置にあり、前記ドア(106)に接続される、ステップ(S011)と、
前記ドアロックスライダー(112)が延出することを可能にするよう、前記第2の回転方向に回転するように前記モーター(226)を制御して、前記ドア(106)を所定の位置に向けて動かすステップ(S012)と、
前記ドア(106)を前記間隙(111)を有するよう開け、前記ドア(106)が前記所定の位置にあり、前記ドアロックスライダー(112)が延出位置にあり前記ドア(106)との接続を保たれているときに、前記ドア(106)を前記間隙(111)を有して開けられている状態で第2の所定の期間の間保ち、前記第2の所定の期間が終了した後にステップS01に進むステップ(S013)と、
を更に含む、請求項1に記載の制御方法。
【請求項6】
前記電気機器は、前記第2の所定の期間内に放熱動作を実行する、請求項5に記載の制御方法。
【請求項7】
ステップS02において、前記間隙(111)に障害物がない場合、又は前記間隙(111)から前記障害物が除去された場合、前記第1の回転方向に回転し続けるように前記モーター(226)を制御し、ステップS03に進む、
請求項1に記載の制御方法。
【請求項8】
ステップS012において、手動介入がある場合、
前記手動介入が手動ドア開放であり、前記ドアロックスライダー(112)が前記ドア(106)から切り離されている場合、前記ドアロックスライダー(112)が後退することを可能にするよう、前記第1の回転方向に回転するように前記モーター(226)を制御し、前記ドア(106)が或る期間の間開位置に保たれた後に手動ドア閉鎖動作を実行し、前記手動ドア閉鎖動作が完了した後にステップS03に進むステップ(S012-1)、又は
前記手動介入が手動ドア閉鎖である場合、前記第1の回転方向に回転するように前記モーター(226)を制御し、前記手動ドア閉鎖動作が完了した後にステップS03に進むステップ(S012-2)、
を実行する、請求項5に記載の制御方法。
【請求項9】
モーター(226)と、ドアロックスライダー(112)と、障害物検出コンポーネントと、制御装置(160)とを備えたドアロック装置(110)であって、前記制御装置(160)は、前記モーター(226)の回転を制御するように構成され、前記モーター(226)は、前記ドアロックスライダー(112)を駆動して動かすように構成され、前記ドアロックスライダー(112)は、電気機器のドア(106)を作動させるように構成され、
該ドアロック装置(110)は、請求項1~8のいずれか一項に記載の制御方法によって前記ドア(106)を開ける又は閉じるように構成されている、ドアロック装置(110)。
【請求項10】
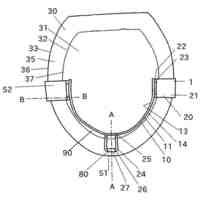
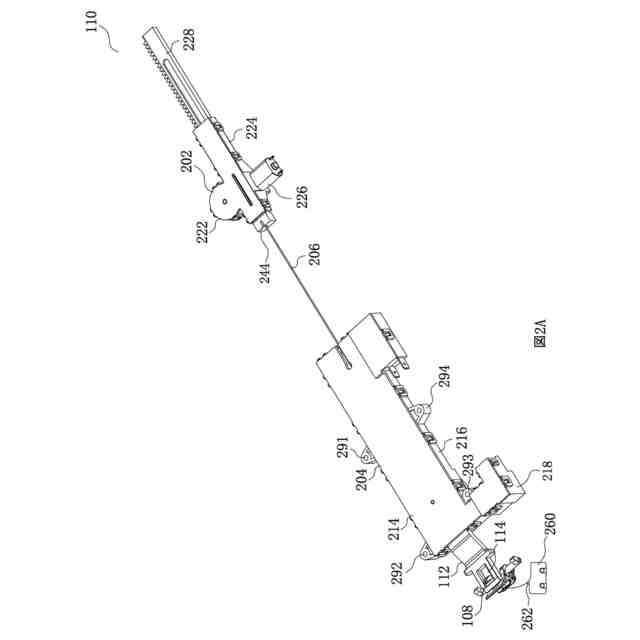
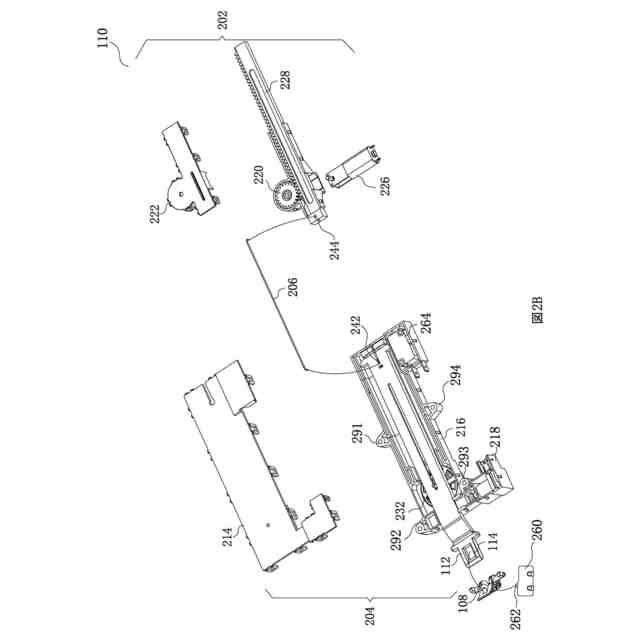
電気機器のドア(106)を開ける及び閉じるためのドアロック装置(110)であって、前記ドアロック装置(110)は、
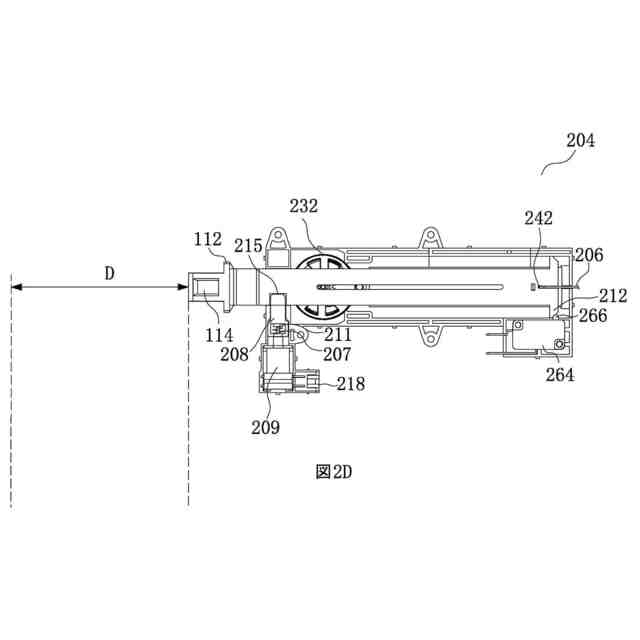
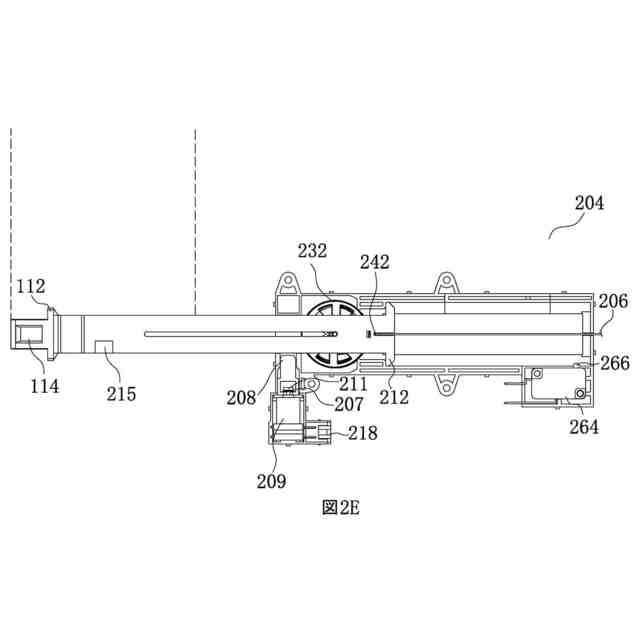
前記ドア(106)を作動させるように構成されたドアロックアセンブリ(204)であって、前記ドアロックアセンブリ(204)は、延出位置及び後退位置を有するドアロックスライダー(112)を含む、ドアロックアセンブリ(204)と、
前記ドアロックスライダー(112)が前記延出位置と前記後退位置との間で往復動することを可能にするために、前記ドアロックスライダー(112)と接続された、駆動アセンブリ(202)と、
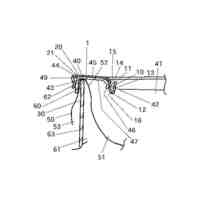
前記ドア(106)が開けられてできた間隙(111)に障害物があるか否かを検出するように構成された、障害物検出コンポーネント(445、446、150)と、
前記障害物検出コンポーネント(445、446、150)からの検出結果に基づいて、前記駆動アセンブリ(202)を制御するように構成された、制御装置(160)と、
を備え、
前記ドアロックスライダー(112)が、閉位置に動くよう前記ドア(106)を駆動し、前記障害物検出コンポーネント(445、446、150)が、前記ドア(106)が開けられてできた前記間隙(111)に障害物があることを検出したときに、前記制御装置(160)が、前記ドアロックスライダー(112)が前記延出位置に動くことを可能にするよう前記駆動アセンブリ(202)を制御して、前記ドア(106)が前記閉位置とは反対の方向に動くことを可能にするように構成されている、ドアロック装置(110)。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、電気機器のドアロック装置、電気機器及び制御方法に関し、特に、電気機器のドアを自動的に開ける及び閉じることが可能なドアロック装置、ドアロック装置を備える電気機器、及びドアの自動的な開放及び閉鎖を制御する制御方法に関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
食器洗浄機等の電気機器のドアは一般的に、ドアロックを備えている。従来のドアロックは、物理的に引くことによってロック解除することができるか、又は物理的に押すことによってロックすることができるものであり、すなわち、手動でドアにおけるラッチを引くことによってロック解除することができるか、又は手動でドアのドアフックをドアフック穴にぶつけることによりロックすることができるものである。
【発明の概要】
【発明が解決しようとする課題】
【0003】
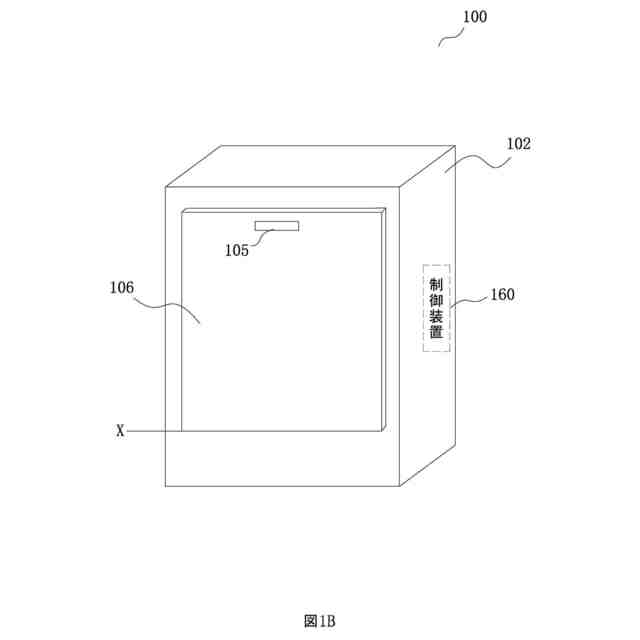
食器洗浄機が洗浄動作を完了した後、典型的には、更に乾燥動作を実行することが要求され、ユーザーはこの場合、食器洗浄機のドアを部分的に開いた状態に維持することができ、例えば、十分な換気を可能にするための間隙を残して、高温の蒸気が食器洗浄機の内部キャビティから排出され、かくしてより速い乾燥を促進することを期待する。乾燥動作の間、ユーザーは典型的には、乾燥動作が完了するまで食器洗浄機のそばで待つことはない。
【0004】
それゆえ、ドアのドアフックに面する食器洗浄機の一方の側に、ドアロック装置が設置されてもよく、ドアロック装置は、ドアロックアセンブリと、駆動装置と、制御装置とを含む。ドアロック装置は、ドアロックスライダーを有し、ドアロックスライダーは、ドアフックに合致するドアフック穴が備えられ、制御装置は、ドアロックスライダーを或る距離だけ延出させるか又は後退させるように制御することによって、ドアの開放又は閉鎖を開放範囲内で制御し、かくしてドアの放熱位置への自動的な開放又は放熱位置からのドアの自動的な閉鎖を実現する。
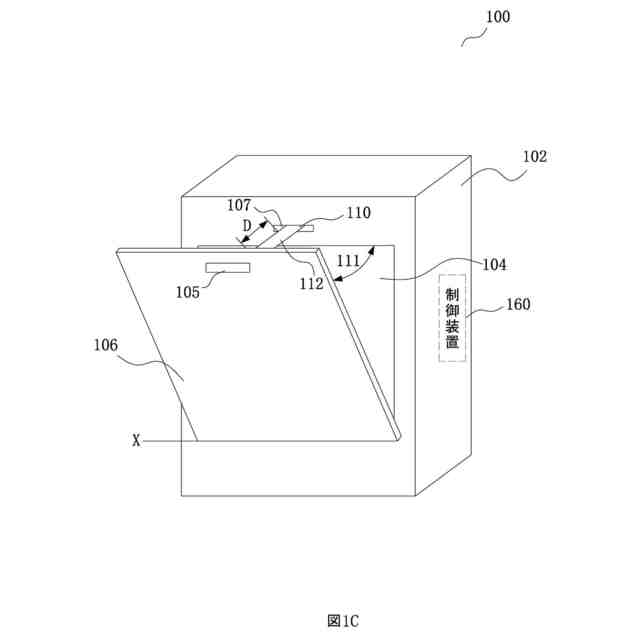
【0005】
具体的には、例えば、ドアが放熱位置にある必要がある場合のように、ドアが或る間隙だけ開けられる必要がある場合、ドアロック装置中の付勢装置及びドアロックスライダーの協働構成により、ドアロックスライダーが延出位置にとどまることができる。ドア間隙が閉じられるべきであるときには、駆動装置中のモーターが駆動されて付勢装置の付勢力に打ち勝ち、ドアロックスライダーを延出位置から後退位置に動くように駆動し、この場合、付勢位置エネルギーが付勢装置に蓄積され、ドアの間隙が再び開けられる必要があるとき、モーターが逆回転して付勢装置の引き力を徐々に解放し、それにより、付勢装置が、蓄積された付勢位置エネルギーの作用の下で、ドアロックスライダーを後退位置から延出位置に動かすことができ、かくして或る距離だけドアを押して開ける。
【0006】
放熱を完了し、食器洗浄機のドアを閉じる過程において、制御装置は自動ドア閉鎖プログラムを作動させ、駆動モーターがドアロックスライダーを延出位置から後退位置に引き戻す。このとき、例えば、ユーザーが誤ってドアの間隙の中に手を伸ばした場合のような、ドアの間隙に異物又は障害物がある場合、ドアが閉まる過程の間に障害物が挟み込まれ、かくしてドアが正常に閉まることができなくなり得る。
【0007】
これに加えて、食器洗浄機が放熱プログラムを実行する過程において、ユーザーが手動で介入してドアを引いて開ける場合、ドアロックスライダーがドアのドアフックから外れ、かくしてドアロックスライダーが外に延在して別途食器洗浄機の外部に露出させられ、また、ユーザーが手動で介入してドアを閉位置に押す場合、ドアロックスライダーがドアに対する押力の作用の下で後退位置に動くものの、ドアロックスライダーは可撓性のロープによって駆動コンポーネントに接続されているため、ロープが駆動コンポーネントからのドアロックスライダーに対する押力を遮断し、駆動コンポーネントのモーター及び駆動ラックがリセットされることなくドアロックスライダーの延出位置に対応する位置にとどまり、かくして後続する自動ドア開放動作が影響を受ける。
【課題を解決するための手段】
【0008】
それゆえ、食器洗浄機のドアの位置にかかわらず、ドア閉鎖過程において障害物が検出されている限り、ドア閉鎖を停止させるか又はドアを開放方向に動かす、食器洗浄機のドアロック装置及びその制御方法に対するニーズがある。さらに、食器洗浄機の放熱プログラムの実行の過程において、ユーザーが手動でドア開放動作又はドア閉鎖動作に介入した場合であっても、食器洗浄機の(放熱)プログラムの正常動作に影響を与えないような、ユーザーからの手動介入に応答するための制御プログラムのセットがあり、ドアロックスライダーが食器洗浄機の外部に別途露出させられない、又は駆動モーターが駆動ラックをリセットして次の自動ドア開放動作に影響を与えないような、食器洗浄機のドアロック装置及びその制御方法に対するニーズがある。
【0009】
したがって、本開示の第1の態様によれば、ドアロック装置のモーターを制御する制御方法が提供され、モーターは、ドアロックスライダーを駆動して動かすように構成され、ドアロックスライダーは、電気機器のドアを作動させるように構成され、本制御方法は、ドアが非閉位置にある場合、ドアロックスライダーが後退することを可能にするように、第1の回転方向に回転するようにモーターを制御して、ドアを閉位置に向けて動かすステップS01と、ドアが閉位置に向かって動く過程において、ドアが開けられてできた間隙に障害物があるか否かを決定するステップS02であって、間隙に障害物がある場合、第1の所定の期間の間、第1の回転方向とは反対の第2の回転方向に回転するようにモーターを制御し、第1の所定の期間が終了した後、第1の回転方向に回転するようにモーターを制御し、間隙から障害物が除去されるまで、ステップS02における上述した動作を繰り返す、ステップS02と、ドアを閉位置に動かすステップS03と、を含む。
【0010】
本開示の第1の態様によれば、ステップS01において、手動介入がある場合、手動介入が手動ドア開放であり、ドアロックスライダーがドアから外れている場合、ドアロックスライダーが後退することを可能にするように第1の回転方向に回転するようにモーターを制御し、ドアが或る期間の間開位置に保たれた後に手動ドア閉鎖動作を実行し、手動ドア閉鎖動作が完了した後にステップS03に進むステップS01-1、又は、手動介入が手動ドア閉鎖である場合、第1の回転方向に回転するようにモーターを制御し、手動ドア閉鎖動作が完了した後にステップS03に進むステップS01-2、が実行される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
家具
3日前
個人
鍋蓋
10か月前
個人
掃除機
4か月前
個人
自助箸
2か月前
個人
耳拭き棒
6か月前
個人
掃除道具
4か月前
個人
枕
4か月前
個人
乾燥器具
9か月前
個人
屋外用箒
3か月前
個人
ハンガー
2か月前
個人
体洗い具
6か月前
個人
枕
1か月前
個人
開閉トング
2か月前
個人
片手代替具
7か月前
個人
組立式棚板
3か月前
個人
エコ掃除機
11か月前
個人
掃除シート
5か月前
個人
エコ掃除機
7か月前
個人
収納型額縁
9か月前
個人
省煙消臭器
4か月前
個人
シャワー装置
1か月前
個人
洗面台
6か月前
個人
食品用トング
9か月前
個人
学童机
9か月前
個人
受け皿
1か月前
個人
中身のない枕
3か月前
個人
転倒防止装置
25日前
個人
折り畳み椅子
9か月前
個人
ゴミ袋保持枠
2か月前
個人
経典表示装置
12日前
個人
汚水汚れ防止具
5か月前
個人
汚水漏れ防止具
5か月前
個人
コーナーシール
5か月前
個人
組立家具
5か月前
個人
ホバー掃除機。
1か月前
個人
食事用具
8か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ