TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025091976
公報種別
公開特許公報(A)
公開日
2025-06-19
出願番号
2023207566
出願日
2023-12-08
発明の名称
ワーク取り出し装置、ワーク取り出し方法
出願人
サンワテクノス株式会社
代理人
個人
,
弁理士法人i.PARTNERS特許事務所
主分類
B65B
69/00 20060101AFI20250612BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】ワークを収容する収容箱から効率良くワークを取り出し可能な技術を提供する。
【解決手段】ワーク取り出し装置であって、箱体を搬送するロボットアーム10と、基準状態において箱体の底面フラップが当接するように箱体が載置される載置部、載置部を基準状態と該基準状態から所定角度傾動した傾動状態とに移行させる傾動部、底面フラップを開放するために該箱体を載置部から離間させる離間部、及び底面フラップが開放された状態において、該底面フラップの閉じる方向への揺動を規制する規制部を有する傾動搬送装置20とを備え、傾動部は、規制部により底面フラップの揺動が規制された状態において、載置部を基準状態となるように逆方向に傾動させることにより、ワークを載置部に当接させ、ロボットアーム10は、底面フラップが開放された状態にある箱体を保持し、載置部及びワークから離間させた。
【選択図】図1
特許請求の範囲
【請求項1】
箱体からワークを取り出すワーク取り出し装置であって、
前記箱体を保持及び保持解除可能に搬送する保持搬送部と、
基準状態において前記保持搬送部により前記箱体の底面フラップが当接するように該箱体が載置される載置部と、
前記載置部を前記基準状態と該基準状態から所定角度傾動した傾動状態とに移行させる傾動部と、
前記載置部が前記傾動状態にある場合、前記底面フラップを開放するために該箱体を前記載置部から離間させる離間部と、
前記底面フラップが開放された状態において、該底面フラップの閉じる方向への揺動を規制する規制部と
を備え、
前記傾動部は、前記規制部により前記底面フラップの揺動が規制された状態において、前記載置部を前記基準状態となるように逆方向に傾動させることにより、前記ワークを前記載置部に当接させ、
前記保持搬送部は、前記底面フラップが開放された状態にある前記箱体を保持し、前記載置部及び前記ワークから離間させる
ことを特徴とするワーク取り出し装置。
続きを表示(約 1,400 文字)
【請求項2】
前記規制部は、前記底面フラップに接触可能な規制プレートと、該規制プレートを一方向に進退動させる進退動装置とを有し、
前記底面フラップが開放された状態において、前記進退動装置により前記規制プレートが前記箱体側に進出して前記底面フラップに接触することにより、該底面フラップの閉じる方向への揺動を規制する
ことを特徴とする請求項1記載のワーク取り出し装置。
【請求項3】
前記保持搬送部は、前記底面フラップに含まれる一対の底面外フラップが閉じられた状態が解除された場合、前記規制プレートの進出に先立って、または、当該進出と同期して、前記底面フラップの閉じる方向への揺動を阻害する
ことを特徴とする請求項2記載のワーク取り出し装置。
【請求項4】
前記離間部は、前記傾動状態において前記載置部から前記箱体を離間させる方向に延在するコンベアである
ことを特徴とする請求項1記載のワーク取り出し装置。
【請求項5】
前記保持搬送部は、前記箱体を吸着及び吸着解除可能な吸着装置と、該吸着装置を前後左右方向及び上下方向に移動可能なロボットアームとを備える
ことを特徴とする請求項1記載のワーク取り出し装置。
【請求項6】
前記載置部はコンベアであり、前記保持搬送部により前記箱体が離間された場合、前記ワークを所定の位置へ搬送する
ことを特徴とする請求項1記載のワーク取り出し装置。
【請求項7】
前記底面フラップに含まれる一対の底面外フラップは、テープにより閉じられており、該閉じられた状態を解除するために、前記テープを切断するカッタ
を更に備えることを特徴とする請求項1記載のワーク取り出し装置。
【請求項8】
前記カッタは、前記保持搬送部に着脱自在に取り付けられる
ことを特徴とする請求項7記載のワーク取り出し装置。
【請求項9】
互いに切離可能な一対の可動ロッドを更に備え、
前記保持搬送部は、前記ワークから離間させ、少なくとも底面が開放された状態にある前記箱体を前記一対の可動ロッドに挿通し、
前記一対の可動ロッドは、互いに離間することにより、前記箱体を折り畳む
ことを特徴とする請求項1記載のワーク取り出し装置。
【請求項10】
箱体からワークを取り出すワーク取り出し方法であって、
コンピュータが、
保持搬送部により前記箱体を保持し、
基準状態にある載置部に対して、前記箱体の底面フラップが当接するように載置し、
傾動部により前記載置部を前記該基準状態から所定角度傾動させて傾動状態にし、
前記箱体の底面フラップを開放するために該箱体を離間部により前記載置部から離間させ、
前記箱体の底面フラップが開放された状態において、該底面フラップの閉じる方向への揺動を規制部により規制し、
前記規制部により前記底面フラップの揺動が規制された状態において、前記傾動部により、前記載置部を前記基準状態となるように逆方向に傾動させ、前記ワークを前記載置部に当接させ、
前記保持搬送部により、前記底面フラップが開放された状態にある前記箱体を保持し、前記載置部及び前記ワークから離間させる
ことを特徴とするワーク取り出し方法。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、ワークが収容された収容箱からワークを取り出すワーク取り出し装置、ワーク取り出し方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、この種のワーク取り出し装置としては、下記特許文献1に示されるような装置が知られている。この装置は、収納部内に積層されて収納されている複数枚のシート状物を、その端から順次取り出すシート状物の取り出し装置であって、一番端のシート状物の周縁部上の複数カ所を押さえる押さえ部と、吸引又は接着により上記シート状物を保持する一対の保持部と、収納部又は保持部を移動させる駆動部とを備えており、一対の保持部のうちの一方のシート状物を引き剥がす力が、他方のシート状物を引き剥がす力より弱くされており、少なくとも引き剥がし力の弱い側の保持部が、弾性体により伸張可能に構成されていることを特徴としている。
【先行技術文献】
【特許文献】
【0003】
特開平10-218399号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述した取り出し装置では、1枚1枚ワークを取り出すことから、非常に時間がかかり、効率が悪いという問題があった。
【0005】
本発明の実施形態が解決しようとする課題は、ワークを収容する収容箱から効率良くワークを取り出し可能な技術を提供することである。
【課題を解決するための手段】
【0006】
上述した課題を解決するため、本発明の実施形態は、箱体からワークを取り出すワーク取り出し装置であって、前記箱体を保持及び保持解除可能に搬送する保持搬送部と、基準状態において前記保持搬送部により前記箱体の底面フラップが当接するように該箱体が載置される載置部と、前記載置部を前記基準状態と該基準状態から所定角度傾動した傾動状態とに移行させる傾動部と、前記載置部が前記傾動状態にある場合、前記底面フラップを開放するために該箱体を前記載置部から離間させる離間部と、前記底面フラップが開放された状態において、該底面フラップの閉じる方向への揺動を規制する規制部とを備え、前記傾動部は、前記規制部により前記底面フラップの揺動が規制された状態において、前記載置部を前記基準状態となるように逆方向に傾動させることにより、前記ワークを前記載置部に当接させ、前記保持搬送部は、前記底面フラップが開放された状態にある前記箱体を保持し、前記載置部及び前記ワークから離間させることを特徴とする。
【発明の効果】
【0007】
本発明の実施形態によれば、ワークを収容する収容箱から効率良くワークを取り出し可能な技術を提供することができる。
【図面の簡単な説明】
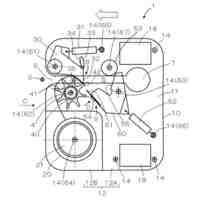
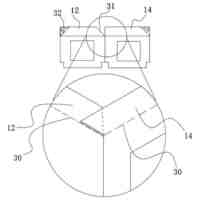
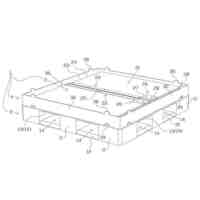
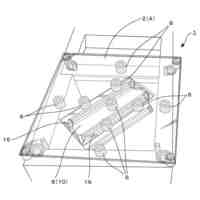
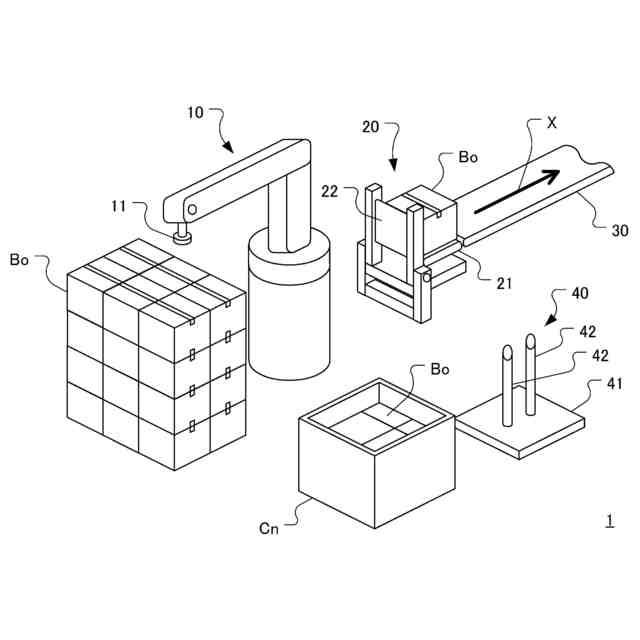
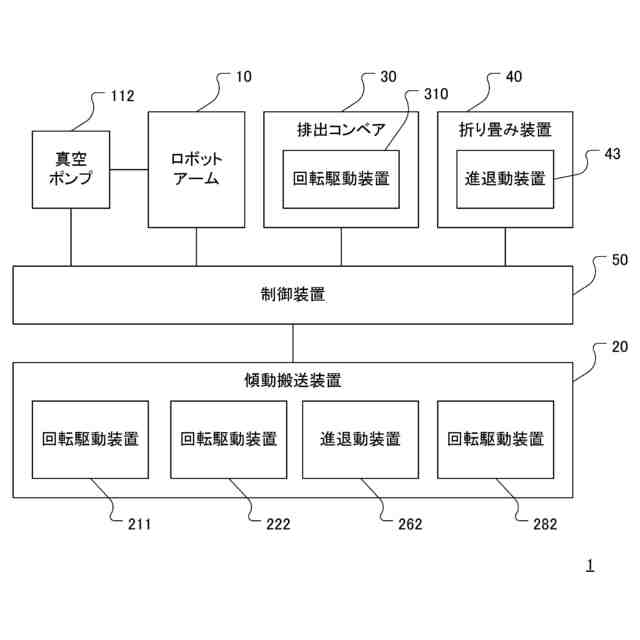
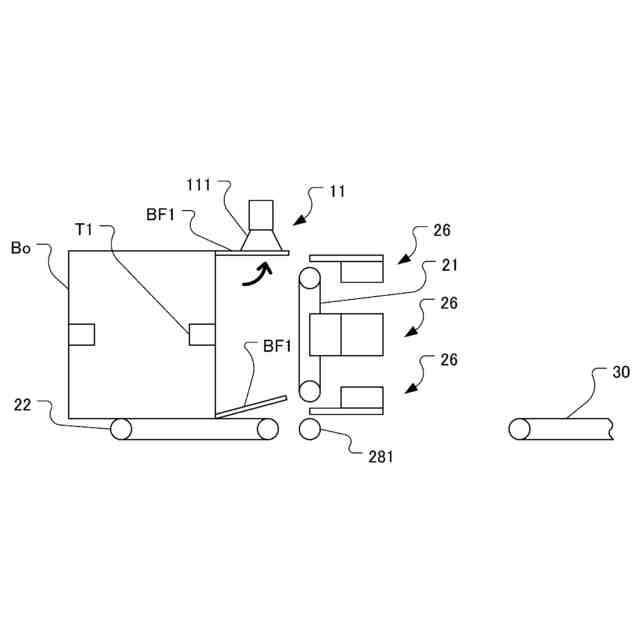
【0008】
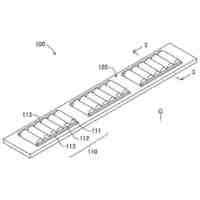
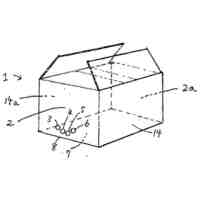
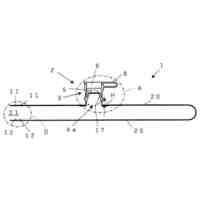
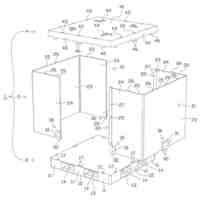
実施形態に係るワーク取り出しシステムを示す概略斜視図である。
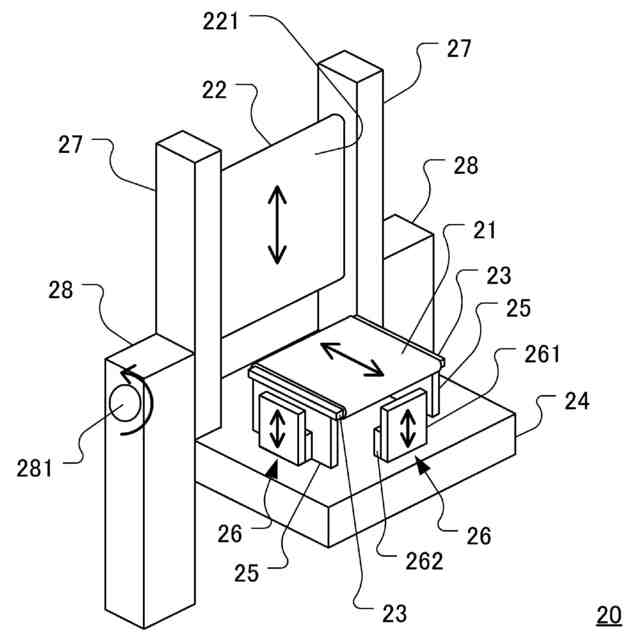
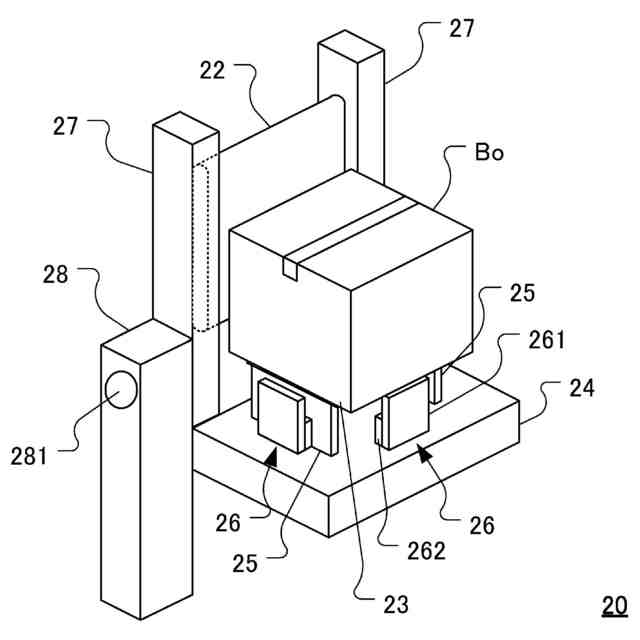
実施形態に係る傾動搬送装置の構成を模式的に示す斜視図である。
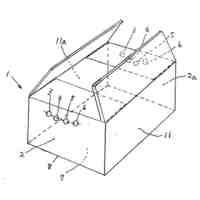
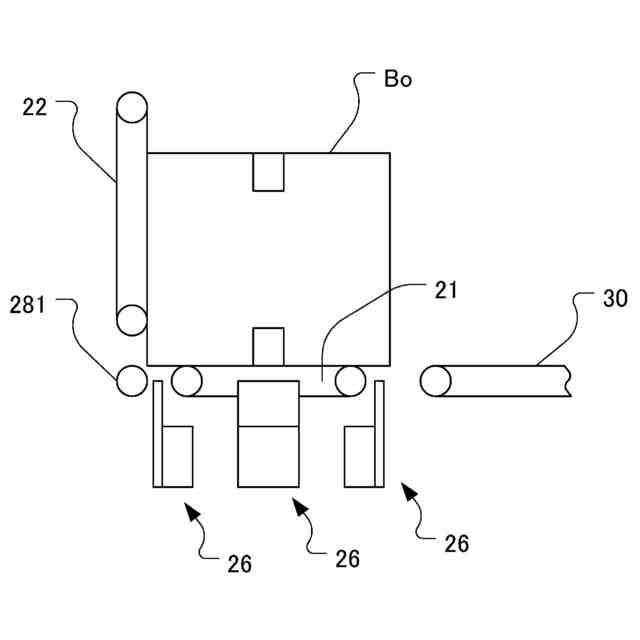
実施形態に係る傾動搬送装置に収容箱が載置された基準状態を模式的に示す斜視図である。
実施形態に係る制御装置の制御系を示すブロック図である。
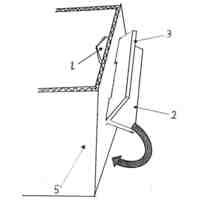
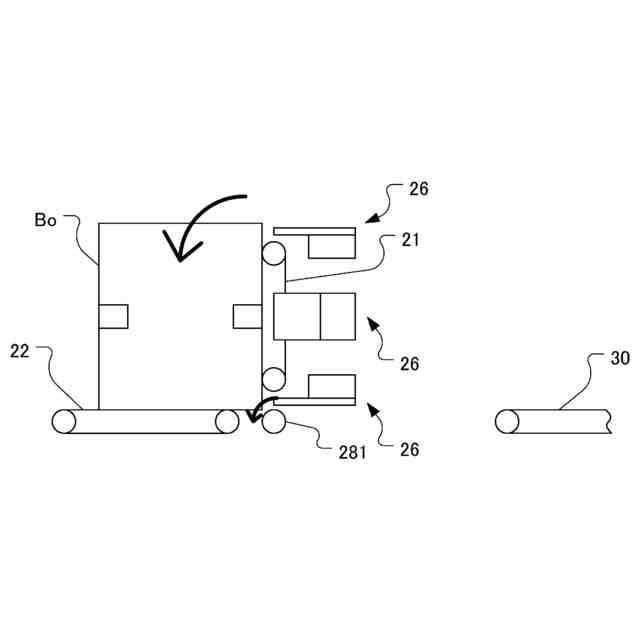
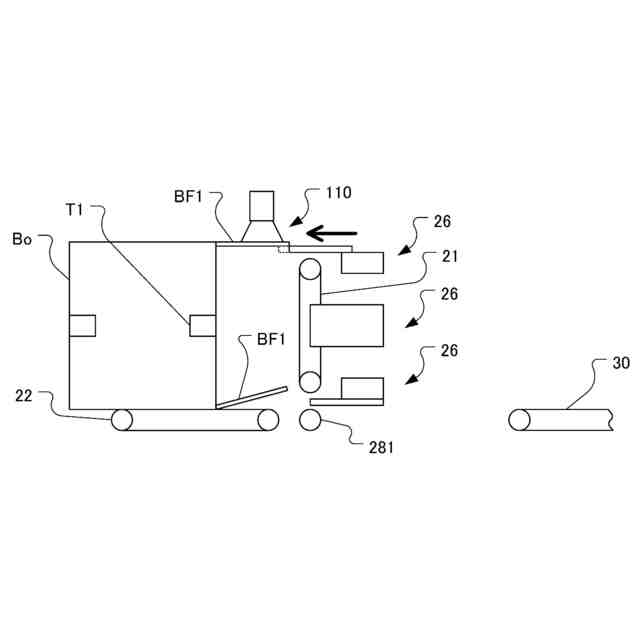
実施形態に係るロボットアームから収容箱が解放された直後の状態を示す側面図である。
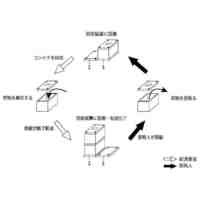
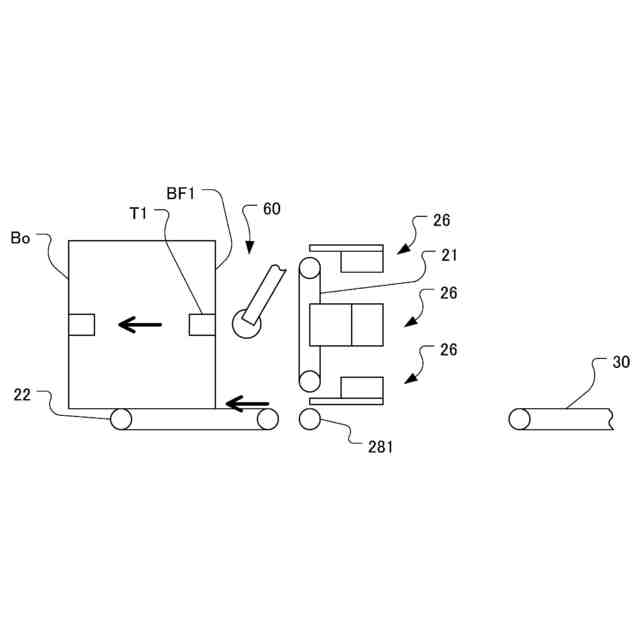
実施形態に係る傾動搬送装置の動作を説明するための図である。
実施形態に係る傾動搬送装置の動作を説明するための図である。
実施形態に係る傾動搬送装置の動作を説明するための図である。
実施形態に係る傾動搬送装置の動作を説明するための図である。
実施形態に係る傾動搬送装置の動作を説明するための図である。
実施形態に係る傾動搬送装置の動作を説明するための図である。
実施形態に係る傾動搬送装置の動作を説明するための図である。
実施形態に係る傾動搬送装置の動作を説明するための図である。
実施形態に係る傾動搬送装置の動作を説明するための図である。
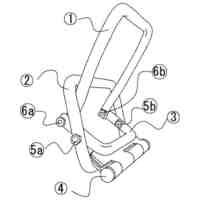
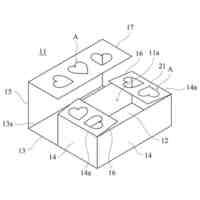
実施形態に係る折り畳み装置の動作を説明するための図である。
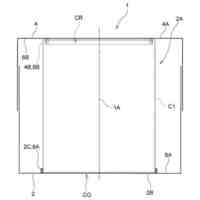
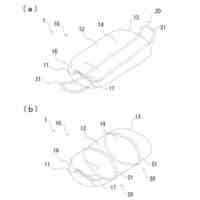
実施形態に係る折り畳み装置により折り畳まれた収容箱を示す平面図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態について図面を参照しつつ説明する。なお、本明細書及び図面において、実質的に同一の機能構成を有する構成要素については、同一の符号を付することにより重複説明を省略する。
【0010】
(装置構成)
図1は、本実施形態に係るワーク取り出しシステムを示す概略斜視図である。図1に示されるように、本実施形態に係るワーク取り出しシステム1は、ロボットアーム10と、傾動搬送装置20と、排出コンベア30と、折り畳み装置40と、ここでは不図示の制御装置50(図4参照)とを備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
箱
8か月前
個人
包装体
9か月前
個人
ゴミ箱
8か月前
個人
コンベア
1か月前
個人
ゴミ収集器
2か月前
個人
段ボール箱
3か月前
個人
容器
5か月前
個人
段ボール箱
2か月前
個人
楽ちんハンド
1か月前
個人
折り畳み水槽
9か月前
個人
宅配システム
2か月前
個人
土嚢運搬器具
4か月前
個人
パウチ補助具
8か月前
個人
角筒状構造体
1か月前
個人
お薬の締結装置
1か月前
個人
ダンボール宝箱
9か月前
個人
閉塞装置
6か月前
個人
コード類収納具
4か月前
個人
貯蔵サイロ
3か月前
株式会社和気
包装用箱
5か月前
個人
把手付米袋
19日前
株式会社コロナ
梱包材
1か月前
個人
圧縮収納袋
9か月前
個人
ゴミ処理機
5か月前
個人
粘着テープ剥がし具
10か月前
株式会社新弘
容器
8か月前
個人
袋入り即席麺
3か月前
株式会社イシダ
包装装置
8か月前
個人
輸送積荷用動吸振器
2か月前
個人
塗料容器用蓋
8か月前
株式会社新弘
容器
8か月前
個人
搬送システム
2か月前
積水樹脂株式会社
接着剤
8か月前
三甲株式会社
蓋体
5か月前
三甲株式会社
蓋体
3か月前
個人
包装箱
6か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ