TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025089264
公報種別
公開特許公報(A)
公開日
2025-06-12
出願番号
2024192925
出願日
2024-11-01
発明の名称
無人機によるメンテナンス支援のための制御方法、装置、電子デバイス、及びコンピュータ可読記憶媒体
出願人
チョーチアン ヘンイー ペトロケミカル カンパニー,リミテッド
,
ハンチョウ イートン ニュー マテリアル カンパニー リミテッド
代理人
弁理士法人太陽国際特許事務所
主分類
G08G
5/00 20250101AFI20250605BHJP(信号)
要約
【課題】無人機によるメンテナンス支援のための制御方法、装置、電子デバイス、記憶媒体及びプログラムを提供する。
【解決手段】該方法は、工事位置にある第1端末によって取得された協力メッセージに応じて、目標ワークピース及びその保管位置を決定することであって、前記協力メッセージは、メンテナンス作業のために不足している目標ワークピースを示すためのものである、ことと、前記工事位置と前記保管位置とに基づいて、搬送タスクの飛行経路を計画することと、前記飛行経路に基づいて、前記目標ワークピースを前記工事位置に搬送するよう無人機を制御することと、を含む。本開示の解決策によれば、メンテナンス作業を行うために必要なワークピースが不足している場合、速やかに無人機によって搬送することができ、それによってメンテナンス作業を支援し、メンテナンス作業の所要時間を短縮することができる。
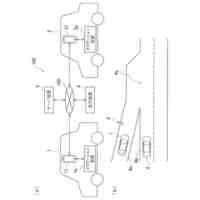
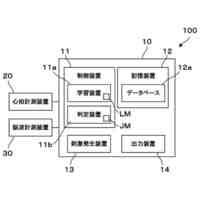
【選択図】図1
特許請求の範囲
【請求項1】
無人機によるメンテナンス支援の制御方法であって、
工事位置にある第1端末によって取得された協力メッセージに応じて、目標ワークピース及びその保管位置を決定することであって、前記協力メッセージは、メンテナンス作業のために不足している目標ワークピースを示すためのものであり、前記工事位置は工場エリアに位置している、ことと、
前記工事位置に基づいて、無人機飛行のための環境情報を決定することと、
前記環境情報に基づいて、タスクタイプを決定することと、
前記タスクタイプが複雑タイプである場合、前記第1端末の履歴経路を取得することであって、前記タスクタイプが複雑タイプである場合には、前記工事位置が設備の密集しているエリアにあると前記環境情報に示される場合を含み、前記第1端末は追従無人機を含み、前記第1端末の履歴経路は前記追従無人機の履歴飛行経路を含む、ことと、
前記工事位置と前記保管位置とに基づいて、第2経路を計画して生成することと、
前記工事位置に基づいて、複雑なエリアを決定することと、
前記第2経路における、前記複雑なエリアに進入する第1軌跡点を決定することと、
前記履歴経路における、前記第1軌跡点に最も近い第2軌跡点を決定することと、
前記第2経路における、前記第1軌跡点の後に位置する部分の経路と、前記履歴経路における、第2軌跡点の後に位置する部分の経路と、を融合して、融合経路を得ることと、
前記第2経路における、前記第1軌跡点の前に位置する部分の経路を、前記融合経路とつなぎ合わせて、搬送タスクの飛行経路を得ることと、
前記飛行経路に基づいて、前記目標ワークピースを前記工事位置に搬送するよう無人機を制御することと、を含む、
無人機によるメンテナンス支援の制御方法。
続きを表示(約 2,700 文字)
【請求項2】
工事位置にある第1端末によって取得された協力メッセージに応じて、目標ワークピース及びその保管位置を決定することは、
工事位置にある第1端末によって取得された協力メッセージに応じて、前記協力メッセージに含まれるセマンティック情報に基づいて、メンテナンス作業のために不足している工具または部品のワークピース情報を決定することと、
前記ワークピース情報に基づいて、在庫から目標ワークピース及びその保管位置を決定することと、を含む、
請求項1に記載の無人機によるメンテナンス支援の制御方法。
【請求項3】
前記タスクタイプと、前記工事位置と、前記保管位置とに基づいて、搬送タスクの飛行経路を計画することは、
前記タスクタイプが非複雑タイプである場合、予め設定された地図における開放エリア及び/または通路エリアを利用して、前記工事位置と前記保管位置とを結ぶ複数の第1経路を計画することと、
前記複数の第1経路の所要時間及び安全性を評価することと、
評価結果及び適時性要件に基づいて、前記複数の第1経路における1つの経路を選択して、搬送タスクの飛行経路を得ることと、を含む、
請求項1に記載の無人機によるメンテナンス支援の制御方法。
【請求項4】
前記制御方法は、
複数の積載無人機の現在の状態に基づいて、前記複数の積載無人機による搬送タスクの完了状況を推定することと、
前記完了状況に基づいて、前記搬送タスクを完了することができ、且つ最短所要時間を要する積載無人機を決定することと、をさらに含む、
請求項1に記載の無人機によるメンテナンス支援の制御方法。
【請求項5】
前記工事位置と前記保管位置とに基づいて、搬送タスクの飛行経路を計画することは、
前記積載無人機の現在位置と前記保管位置とに基づいて、ワークピース取り出しタスクを生成することと、
前記ワークピース取り出しタスクが完了した場合、前記保管位置と前記工事位置とに基づいて、搬送タスクの飛行経路を計画することと、を含む、
請求項4に記載の無人機によるメンテナンス支援の制御方法。
【請求項6】
無人機によるメンテナンス支援の装置であって、
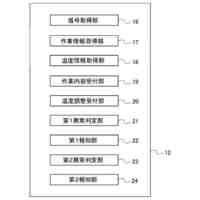
工事位置にある第1端末によって取得された協力メッセージに応じて、目標ワークピース及びその保管位置を決定するためのワークピース照会モジュールであって、前記協力メッセージは、メンテナンス作業のために不足している目標ワークピースを示すためのものであり、前記工事位置は工場エリアに位置している、ワークピース照会モジュールと、
経路計画モジュールであって、
前記工事位置に基づいて、無人機飛行のための環境情報を決定するための情報決定サブモジュールと、
前記環境情報に基づいて、タスクタイプを決定するためのタイプ決定サブモジュールと、
計画サブモジュールであって、
前記タスクタイプが複雑タイプである場合、前記第1端末の履歴経路を取得することであって、前記タスクタイプが複雑タイプである場合には、前記工事位置が設備の密集しているエリアにあると前記環境情報に示される場合を含み、前記第1端末は追従無人機を含み、前記第1端末の履歴経路は前記追従無人機の履歴飛行経路を含む、ことと、
前記工事位置と前記保管位置とに基づいて、第2経路を計画して生成することと、
前記工事位置に基づいて、複雑なエリアを決定することと、
前記第2経路における、前記複雑なエリアに進入する第1軌跡点を決定することと、
前記履歴経路における、前記第1軌跡点に最も近い第2軌跡点を決定することと、
前記第2経路における、前記第1軌跡点の後に位置する部分の経路と、前記履歴経路における、第2軌跡点の後に位置する部分の経路と、を融合して、融合経路を得ることと、
前記第2経路における、前記第1軌跡点の前に位置する部分の経路を、前記融合経路とつなぎ合わせて、搬送タスクの飛行経路を得ることと、
に用いられる、計画サブモジュールと、を含む、経路計画モジュールと、
前記飛行経路に基づいて、前記目標ワークピースを前記工事位置に搬送するよう無人機を制御するための制御モジュールと、を備える、
無人機によるメンテナンス支援の装置。
【請求項7】
ワークピース照会モジュールは、
工事位置にある第1端末によって取得された協力メッセージに応じて、前記協力メッセージに含まれるセマンティック情報に基づいて、メンテナンス作業のために不足している工具または部品のワークピース情報を決定することと、
前記ワークピース情報に基づいて、在庫から目標ワークピース及びその保管位置を決定することと、に用いられる、
請求項6に記載の無人機によるメンテナンス支援の装置。
【請求項8】
計画サブモジュールは、
前記タスクタイプが非複雑タイプである場合、予め設定された地図における開放エリア及び/または通路エリアを利用して、前記工事位置と前記保管位置とを結ぶ複数の第1経路を計画することと、
前記複数の第1経路の所要時間及び安全性を評価することと、
評価結果及び適時性要件に基づいて、前記複数の第1経路における1つの経路を選択して、搬送タスクの飛行経路を得ることと、に用いられる、
請求項6に記載の無人機によるメンテナンス支援の装置。
【請求項9】
前記装置は、
複数の積載無人機の現在の状態に基づいて、前記複数の積載無人機による搬送タスクの完了状況を推定することと、
前記完了状況に基づいて、前記搬送タスクを完了することができ、且つ最短所要時間を要する積載無人機を決定することと、に用いられる選択モジュールをさらに備える、
請求項6に記載の無人機によるメンテナンス支援の装置。
【請求項10】
経路計画モジュールは、
前記積載無人機の現在位置と前記保管位置とに基づいて、ワークピース取り出しタスクを生成することと、
前記ワークピース取り出しタスクが完了した場合、前記保管位置と前記工事位置とに基づいて、搬送タスクの飛行経路を計画することと、にさらに用いられる、
請求項9に記載の無人機によるメンテナンス支援の装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は無人機技術分野に関し、特に無人機の制御、経路計画、デバイスメンテナンスの技術分野に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来のメンテナンス作業では、メンテナンス担当者がメンテナンス作業実施中に突然必要な工具や部品が不足していることに気づいた場合、通常、現在の工事プロセスを中断し、倉庫やその他の保管エリアに戻って必要な物品を入手する必要があり、その結果、メンテナンス効率が大幅に低下する。 特に、狭いスペース、複雑な環境、現場へのアクセスが困難な場合、メンテナンスの進捗状況や関連する生産業務に大きな影響を与える。
【発明の概要】
【発明が解決しようとする課題】
【0003】
本開示は、従来技術における1つまたは複数の技術的問題を解決または緩和するために、無人機によるメンテナンス支援のための制御方法、装置、電子デバイス、記憶媒体及びプログラムを提供する。
【課題を解決するための手段】
【0004】
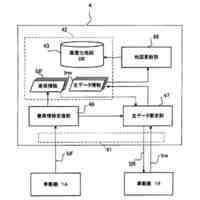
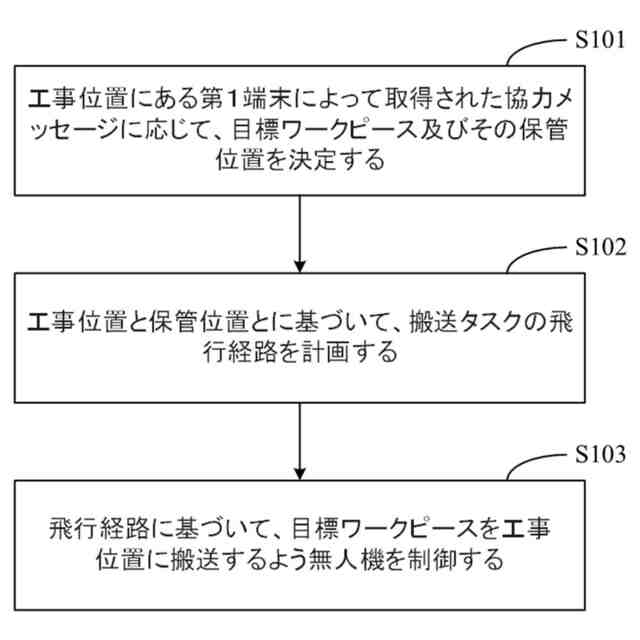
第1態様では、本開示は無人機によるメンテナンス支援のための制御方法を提供し、該方法は、
工事位置にある第1端末によって取得された協力メッセージに応じて、目標ワークピース及びその保管位置を決定することであって、前記協力メッセージは、メンテナンス作業のために不足している目標ワークピースを示すためのものである、ことと、
前記工事位置と前記保管位置とに基づいて、搬送タスクの飛行経路を計画することと、
前記飛行経路に基づいて、前記目標ワークピースを前記工事位置に搬送するよう無人機を制御することと、を含む。
【0005】
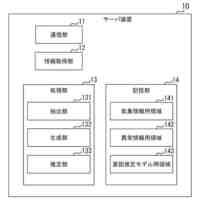
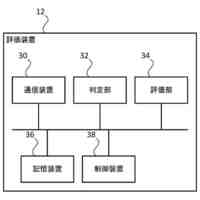
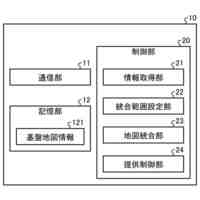
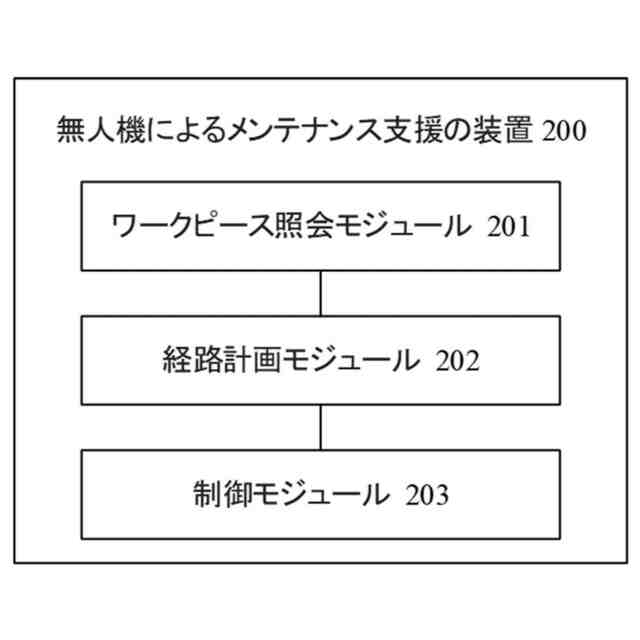
第2態様では、本開示は無人機によるメンテナンス支援の装置を提供し、該装置は、
工事位置にある第1端末によって取得された協力メッセージに応じて、目標ワークピース及びその保管位置を決定するためのワークピース照会モジュールであって、前記協力メッセージは、メンテナンス作業のために不足している目標ワークピースを示すためのものである、ワークピース照会モジュールと、
前記工事位置と前記保管位置とに基づいて、搬送タスクの飛行経路を計画するための経路計画モジュールと、
前記飛行経路に基づいて、前記目標ワークピースを前記工事位置に搬送するよう無人機を制御するための制御モジュールと、を備える。
【0006】
第3態様では、本開示は電子デバイスを提供し、当該デバイスは、
少なくとも1つのプロセッサと、
該少なくとも1つのプロセッサと通信接続されるメモリと、を備え、
該メモリに、該少なくとも1つのプロセッサで実行可能な命令が記憶され、該命令は、該少なくとも1つのプロセッサによって実行されると、本開示の実施例におけるいずれか1つの方法を実行させる。
【0007】
第4態様では、本開示の実施例におけるいずれか1つの方法をコンピュータに実行させるためのコンピュータ命令を記憶した非一時的コンピュータ可読記憶媒体を提供する。
【0008】
第5様態では、プログラムを提供し、該プログラムは、プロセッサにより実行されると、本開示の実施例におけるいずれか1つの方法を実現する。
【0009】
本開示が提供する解決策の有益な効果は、少なくとも以下を含む。
【0010】
メンテナンス作業を行うために必要なワークピースが不足している場合、速やかに無人機によって搬送することができ、それによってメンテナンス作業を支援し、メンテナンス作業の所要時間を短縮することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社JVCケンウッド
情報処理装置
6日前
株式会社京三製作所
交通信号制御機保守システム
7日前
本田技研工業株式会社
要因推定システムおよび車両
1日前
トヨタ自動車株式会社
運転支援システム
7日前
株式会社マイキー
発着時刻表示システム
8日前
日産自動車株式会社
配車管理装置及び配車管理方法
7日前
トヨタ自動車株式会社
配送計画の生成方法
1日前
トヨタ自動車株式会社
装置および方法
6日前
能美防災株式会社
光電式分離型感知器
5日前
本田技研工業株式会社
制御装置、プログラム及び車両
6日前
トヨタ自動車株式会社
配車管理装置
7日前
トヨタ自動車株式会社
運転評価システム
7日前
株式会社デンソー
支援システム、支援方法、支援プログラム
7日前
財団法人車輌研究測試中心
自動運転引継ぎ判定方法及びそのシステム
6日前
コムフィット株式会社
火災予兆通知装置、火災予兆通知システム
1日前
智易科技股ふん有限公司
センサ付き車両の車両軌跡を記録するためのシステム及び方法
6日前
国立大学法人埼玉大学
運転適性確認装置及び運転適性確認システム
6日前
日産自動車株式会社
配車管理装置及び配車管理システムにおける通信制御方法
7日前
財団法人車輌研究測試中心
車線変更決定システムと方法、及び非一時的なコンピュータ
6日前
株式会社FUJI
報知システム及び報知システムの制御方法
6日前
パナソニックIPマネジメント株式会社
異常検知システム及び異常検知方法
5日前
オムロン株式会社
運行管理システム、管理装置、方法、及びプログラム
7日前
株式会社Luup
制御方法、プログラム、制御装置
7日前
株式会社豊田自動織機
接近検知システム
1日前
株式会社JVCケンウッド
地図情報管理制御装置および地図情報管理制御方法
6日前
富士通株式会社
出力制御プログラム、出力制御方法およびナビゲーション装置
5日前
トータルフューチャーヘルスケア株式会社
浴室安全管理システム及び浴室安全管理方法
6日前
株式会社トヨタプロダクションエンジニアリング
監視システム、監視方法、及び監視プログラム
7日前
三菱電機株式会社
見守りシステムおよび見守り方法
8日前
財団法人車輌研究測試中心
車両隊列交差点意思決定システムおよびその方法
6日前
三菱電機株式会社
駐車場満空予測装置、運行および休憩プラン作成装置、および、駐車場満空予測システム
1日前
パイオニア株式会社
情報処理装置、方法、プログラム及び記憶媒体
7日前
株式会社トヨタマップマスター
情報処理装置、情報処理方法及び情報処理プログラム、記録媒体
7日前
トヨタ自動車株式会社
車両運転支援装置、車両運転支援方法及びそのプログラム
1日前
トヨタ自動車株式会社
制御装置、運転支援方法、及びコンピュータプログラム
6日前
楽天グループ株式会社
電子チケット管理システム、電子チケット管理方法、入場者端末、サーバ、ならびに、プログラム
6日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ