TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025088113
公報種別
公開特許公報(A)
公開日
2025-06-11
出願番号
2023202587
出願日
2023-11-30
発明の名称
車線変更決定システムと方法、及び非一時的なコンピュータ
出願人
財団法人車輌研究測試中心
代理人
個人
,
個人
主分類
G08G
1/16 20060101AFI20250604BHJP(信号)
要約
【課題】車線変更用最小リスク決定システムを提供する。
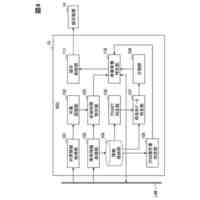
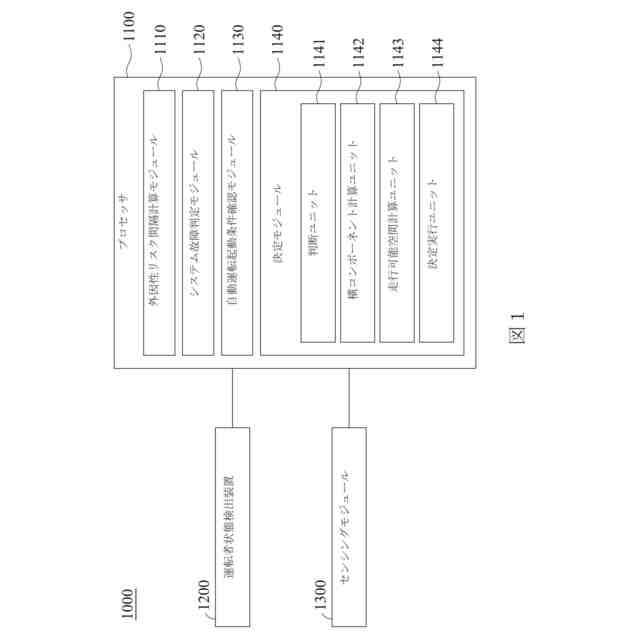
【解決手段】本発明は、車両に設けられ、少なくとも1つのプロセッサを備える車線変更用最小リスク決定システムを提供し、プロセッサは、外因性リスク間隔計算モジュール、システム故障判定モジュール、自動運転起動条件確認モジュール及び決定モジュールを備え、外因性リスク間隔計算モジュールは外因性リスク間隔を計算し、システム故障判定モジュールは車両のシステムがいずれかの時点で故障しかどうか、及び車両のバックアップシステムの横モジュールが有効であるかどうかを判断し、自動運転起動条件確認モジュールは自動運転起動条件が満たされるかどうかを確認する。決定実行ユニットは外因性リスク、システム故障リスク及び自動運転起動条件不満足リスクの中のいずれかが発生したと、最小リスク決定を行う。これによって、自動運転を法規に一致させて走行安全性を向上させる。
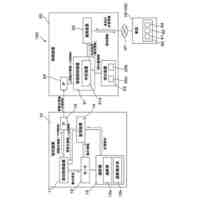
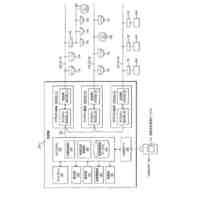
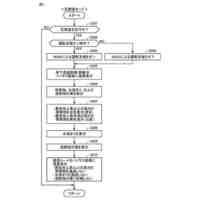
【選択図】図1
特許請求の範囲
【請求項1】
車両に設けられ、少なくとも1つのプロセッサを備える車線変更用最小リスク決定システムであって、
前記少なくとも1つのプロセッサは、
前記車両が車線変更決定に入った後、複数の時点のいずれかの前記時点での現在位置における前方物体との衝突時間を計算し、前記衝突時間で前記車両が前記現在位置から目標車線に車線変更する横加速度を計算し、前記横加速度と最大通常横加速度の大きい方及び前記車両が前記目標車線に車線変更する横距離で外因性リスク間隔を計算する外因性リスク間隔計算モジュールと、
前記車両のシステムがいずれかの前記時点で故障したかどうか、及び前記車両のバックアップシステムの横モジュールが有効であるかどうかを判断するシステム故障判定モジュールと、
前記車両の運転者のいずれかの前記時点での状態が利用可能であるかどうかに基づいて、自動運転起動条件が満たされるかどうかを確認する自動運転起動条件確認モジュールと、
前記車両に外因性リスク、システム故障リスク及び自動運転起動条件不満足リスクが発生したかどうかを判断し、前記システムが正常な状態で、ある前記時点での前記車両と前記前方物体との間の相対縦距離が前記外因性リスク間隔以下であると、前記外因性リスクが発生したと判定し、ある前記時点で前記システムが故障したが、前記バックアップシステムの前記横モジュールが有効であると、前記システム故障リスクが発生したと判定し、前記システムが正常で且つある前記時点での前記相対縦距離が前記外因性リスク間隔より大きいが、前記自動運転起動条件が満たされないと、前記自動運転起動条件不満足リスクが発生したと判定する判断ユニットと、
前記外因性リスク、前記システム故障リスク及び前記自動運転起動条件不満足リスクの中のいずれかが発生したと、前記車両が前記ある時点での前記目標車線に車線変更する車線変更時間を計算することによって、前記車両の緊急横加速度を計算し、前記緊急横加速度または通常横加速度で前記車両の横コンポーネントを計算する横コンポーネント計算ユニットと、
前記外因性リスク、前記システム故障リスク及び前記自動運転起動条件不満足リスクの中のいずれかが発生したと、前記横距離、前記横コンポーネント及び前記目標車線
の後方物体の後方物体速度で、前記ある時点で前記目標車線における走行可能空間を計算する走行可能空間計算ユニットと、
前記外因性リスク、前記システム故障リスク及び前記自動運転起動条件不満足リスクの中のいずれかが発生したと、最小リスク決定を行い、
前記外因性リスクまたは前記システム故障リスクが発生したと、前記車両を前記横コンポーネントで車線変更して前記走行可能空間に進入させるか、静止まで減速させ、そして
前記自動運転起動条件不満足リスクが発生したと、前記車両を前記横コンポーネントで車線変更して前記走行可能空間に進入させるか、または前記車線変更決定の元の軌跡に従って別の前記時点まで少なくとも一定の時間移動させ、前記自動運転起動条件が持続的に満たされない場合、前記別の時点での前記目標車線、車線変更の前記横コンポーネント及び前記走行可能空間を再確認する決定実行ユニットと、
を含む決定モジュールと、
を備える車線変更用最小リスク決定システム。
続きを表示(約 3,400 文字)
【請求項2】
前記外因性リスク間隔計算モジュールは、
JPEG
2025088113000021.jpg
12
153
、、
及び
JPEG
2025088113000022.jpg
12
154
を演算し、T
c
は前記衝突時間であり、D
r
は前記車両と前記前方物体との間の前記相対縦距離であり、v
h
は前記車両の自車速度であり、v
t
は前記前方物体の前方物体速度であり、a
y
は前記衝突時間で計算した前記車両の前記横加速度であり、a
yrgmax
は前記最大通常横加速度であり、a
ymax
は前記横加速度と前記最大通常横加速度のうちの前記大きい方であり、D
y
は前記横距離であり、v
x
は前記自車速度の縦コンポーネントであり、D
F
は前記外因性リスク間隔である請求項1に記載の車線変更用最小リスク決定システム。
【請求項3】
前記判断ユニットはある前記時点で前記外因性リスクまたは前記システム故障リスクが発生したと判定する場合、前記横コンポーネント計算ユニットは、
JPEG
2025088113000023.jpg
11
153
及び
JPEG
2025088113000024.jpg
11
153
を演算し、T
Lc
は前記車線変更時間であり、Lは前記車両の長さであり、t
ISO limit
は法規による車線横断不可時間であり、a
y
E
は前記緊急横加速度である請求項2に記載の車線変更用最小リスク決定システム。
【請求項4】
前記ある時点での前記走行可能空間に障害物がなく、且つ前記緊急横加速度が前記法規による緊急横加速度の上限以下であると、車線変更して前記走行可能空間に入り、逆であると、停止するまで減速する請求項3に記載の車線変更用最小リスク決定システム。
【請求項5】
前記判断ユニットはある前記時点で前記自動運転起動条件不満足リスクが発生したと判定すると、前記横コンポーネント計算ユニットは前記通常横加速度で前記横コンポーネントを計算する請求項2に記載の車線変更用最小リスク決定システム。
【請求項6】
前記走行可能空間に障害物があると、障害物が離れるのを待ってから前記通常横加速度で前記走行可能空間に入る請求項5に記載の車線変更用最小リスク決定システム。
【請求項7】
前記車両は右に向かって次々と路肩にある前記走行可能空間に車線変更し、停止するまで減速する請求項4または6に記載の車線変更用最小リスク決定システム。
【請求項8】
前記判断ユニットはある前記時点で前記自動運転起動条件不満足リスクが発生したと判定すると、前記決定実行ユニットは前記少なくとも一定の時間内に警告を出す請求項1に記載の車線変更用最小リスク決定システム。
【請求項9】
車線変更最小リスク決定方法であって、
少なくとも1つのプロセッサの外因性リスク間隔計算モジュールに、車両が車線変更決定に入った後、複数の時点のいずれかの前記時点での現在位置における前方物体との衝突時間を計算し、前記衝突時間で前記車両が前記現在位置から目標車線に車線変更する横加速度を計算し、前記横加速度と最大通常横加速度の大きい方及び前記車両が前記目標車線に車線変更する横距離で外因性リスク間隔を計算させる外因性リスク間隔計算ステップと、
前記少なくとも1つのプロセッサのシステム故障判定モジュールに、前記車両のシステムがいずれかの前記時点で故障したかどうか、及び前記車両のバックアップシステムの横モジュールが有効であるかどうかを判断させるシステム故障判定ステップと、
前記少なくとも1つのプロセッサの自動運転起動条件確認モジュールに、前記車両の運転者のいずれかの前記時点での状態が利用可能であるかどうかに基づいて、自動運転起動条件が満たされるかどうかを確認させる自動運転起動条件判定ステップと、
前記少なくとも1つのプロセッサの判断ユニットに、前記車両に外因性リスク、システム故障リスク及び自動運転起動条件不満足リスクが発生したかどうかを判断し、前記システムが正常な状態で、ある前記時点での前記車両と前記前方物体との間の相対縦距離が前記外因性リスク間隔以下であると、前記外因性リスクが発生したと判定し、ある前記時点で前記システムが故障したが、前記バックアップシステムの前記横モジュールが有効であると、前記システム故障リスクが発生したと判定し、前記システムが正常で且つある前記時点での前記相対縦距離が前記外因性リスク間隔より大きいが、前記自動運転起動条件が満たされないと、前記自動運転起動条件不満足リスクが発生したと判定させるリスク判断ステップと、
前記少なくとも1つのプロセッサの横コンポーネント計算ユニットに、前記外因性リスク、前記システム故障リスク及び前記自動運転起動条件不満足リスクの中のいずれかが発生したと、前記車両が前記ある時点での前記目標車線に車線変更する車線変更時間を計算することによって、前記車両の緊急横加速度を計算し、前記緊急横加速度または通常横加速度で前記車両の横コンポーネントを計算させる横コンポーネント計算ステップと、
前記少なくとも1つのプロセッサの走行可能空間計算モジュールに、前記外因性リスク、前記システム故障リスク及び前記自動運転起動条件不満足リスクの中のいずれかが発生したと、前記横距離、前記横コンポーネント及び前記目標車線の後方物体の後方物
体速度で、前記ある時点での走行可能空間を計算させる走行可能空間計算ステップと、
前記少なくとも1つのプロセッサの決定実行ユニットに、前記外因性リスク、前記システム故障リスク及び前記自動運転起動条件不満足リスクの中のいずれかが発生したと、最小リスク決定を行い、
前記外因性リスクまたは前記システム故障リスクが発生したと、前記車両を前記横コンポーネントで車線変更して前記走行可能空間に進入させるか、静止まで減速させ、そして
前記自動運転起動条件不満足リスクが発生したと、前記車両を前記横コンポーネントで車線変更して前記走行可能空間に進入させるか、または前記車線変更決定の元の軌跡に従って別の前記時点まで少なくとも一定の時間移動させ、前記自動運転起動条件が持続的に満たされない場合、前記別の時点での前記目標車線、車線変更の前記横コンポーネント及び前記走行可能空間を再確認させる最小リスク決定実行ステップと、
を含む車線変更最小リスク決定方法。
【請求項10】
前記外因性リスク間隔計算モジュールは、
JPEG
2025088113000025.jpg
12
153
及び
JPEG
2025088113000026.jpg
12
153
を演算し、T
c
は前記衝突時間であり、D
r
は前記車両と前記前方物体との間の前記相対縦距離であり、v
h
は前記車両の自車速度であり、v
t
は前記前方物体の前方物体速度であり、a
y
は前記衝突時間で計算した前記車両の前記横加速度であり、a
yrgmax
は前記最大通常横加速度であり、a
ymax
は前記横加速度と前記最大通常横加速度のうちの前記大きい方であり、D
y
は前記横距離であり、v
x
は前記自車速度の縦コンポーネントであり、D
F
は前記外因性リスク間隔である請求項9に記載の車線変更最小リスク決定方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は最小リスク決定システムと方法、及び非一時的なコンピュータ可読媒体に関し、且つ車線変更用最小リスク決定システムと方法、及び非一時的なコンピュータ可読媒体に関する。
続きを表示(約 3,100 文字)
【背景技術】
【0002】
近年、車両の自動運転は急速に発展しているが、米国自動車技術者協会(SAE International)と米国運輸省道路交通安全局(NHTSA)は運転支援と自動化の程度の設計によって、自走車を5つのレベルに分けている。ここで、レベル3(level 3)自走車は自動運転システムが環境認識能力を持つことができるが、運転者は適切に干渉できることを示す。
【発明の概要】
【発明が解決しようとする課題】
【0003】
自動運転の安全性を高めるために、国連の自動車基準調和世界フォーラムはUN R157をレベル3(level 3)自走車のコンプライアンス基準として発行し、これは、自走車に(例えばシステム故障)緊急事態が発生した場合や自動運転が起動標準を満たしていない場合に、運転権の移転と最小リスクの保護メカニズムを備える必要があることを目的とする。従来の技術では、車線変更の過程で最小リスク決定を実行することが不足しているため、如何に自走車の車線変更をUN R157の規定を満たすかは、関係業者の努力の目標となっている。
【課題を解決するための手段】
【0004】
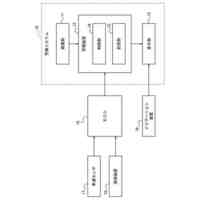
上記問題を解決するために、本発明は、車線変更用最小リスク決定システムと方法、及び非一時的なコンピュータ可読媒体を提供し、システムアーキテクチャと方法、ステップによって、自走車は車線変更の過程で最小リスク決定を実行することができる。
【0005】
本発明の一実施形態によれば、車両に設けられ、少なくとも1つのプロセッサを備える車線変更用最小リスク決定システムを提供し、前述少なくとも1つのプロセッサは、車両が車線変更決定に入った後、複数の時点のいずれかの時点での現在位置における前方物体との衝突時間を計算し、衝突時間で車両が現在位置から目標車線に車線変更する横加速度を計算し、横加速度と最大通常横加速度の大きい方及び車両が目標車線に車線変更する横距離で外因性リスク間隔を計算する外因性リスク間隔計算モジュールと、車両のシステムがいずれかの時点で故障したかどうか、及び車両のバックアップシステムの横モジュールが有効であるかどうかを判断するシステム故障判定モジュールと、車両の運転者のいずれかの時点での状態が利用可能であるかどうかに基づいて、自動運転起動条件が満たされるかどうかを確認する自動運転起動条件確認モジュールと、車両に外因性リスク、システム故障リスク及び自動運転起動条件不満足リスクが発生したかどうかを判断し、システムが正常な状態で、ある時点での車両と前方物体との間の相対縦距離が外因性リスク間隔以下であると、外因性リスクが発生したと判定し、ある時点でシステムが故障したが、バックアップシステムの横モジュールが有効であると、システム故障リスクが発生したと判定し、システムが正常で且つある時点での相対縦距離が外因性リスク間隔より大きいが、自動運転起動条件が満たされないと、自動運転起動条件不満足リスクが発生したと判定する判断ユニットと、外因性リスク、システム故障リスク及び自動運転起動条件不満足リスクの中のいずれかが発生したと、車両が前述ある時点での目標車線に車線変更する車線変更時間を計算することによって、車両の緊急横加速度を計算し、緊急横加速度または通常横加速度で車両の横コンポーネントを計算する横コンポーネント計算ユニットと、外因性リスク、システム故障リスク及び自動運転起動条件不満足リスクの中のいずれかが発生したと、横距離、横コンポーネント及び目標車線の後方物体の後方物体速度で、前述ある時点で目標車線における走行可能空間を計算する走行可能空間計算ユニットと、外因性リスク、システム故障リスク及び自動運転起動条件不満足リスクの中のいずれかが発生したと、最小リスク決定を行い、外因性リスクまたはシステム故障リスクが発生したと、車両を横コンポーネントで車線変更して走行可能空間に進入させるか、静止まで減速させ、そして自動運転起動条件不満足リスクが発生したと、車両を横コンポーネントで車線変更して走行可能空間に進入させるか、または車線変更決定の元の軌跡に従って別の時点まで少なくとも一定の時間移動させ、自動運転起動条件が持続的に満たされない場合、前述別の時点での目標車線、車線変更の横コンポーネント及び走行可能空間を再確認する決定実行ユニットと、を含む決定モジュールと、を備える。
【0006】
これによって、外因性リスク間隔を計算し、システムが故障しているかどうか、自動運転起動条件が満たされているかどうかを検出することによって、外因性リスク、システム故障リスク及び自動運転起動条件不満足リスクが発生したかどうかを判断することができ、走行可能空間を計算して最小リスク決定を実行することで、車線変更をUN R157の規定を満たし、安全性を向上させることができる。
【0007】
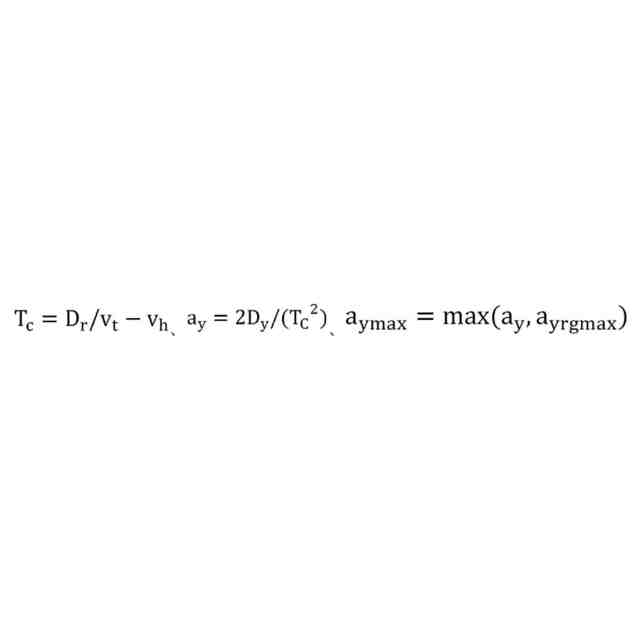
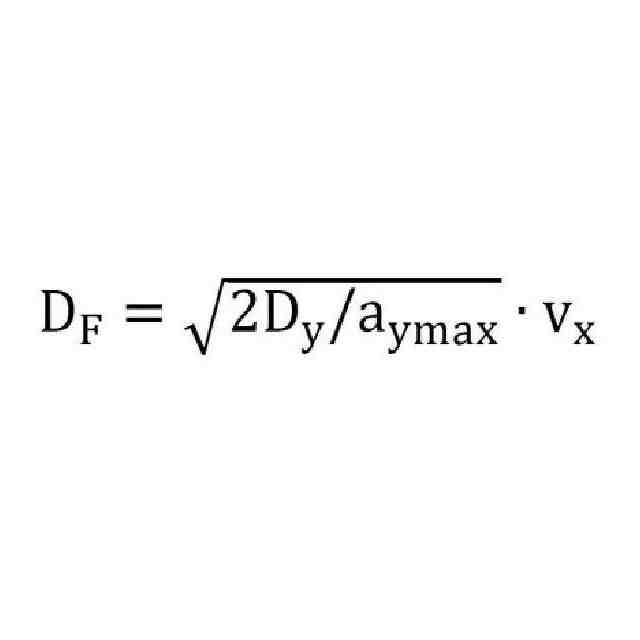
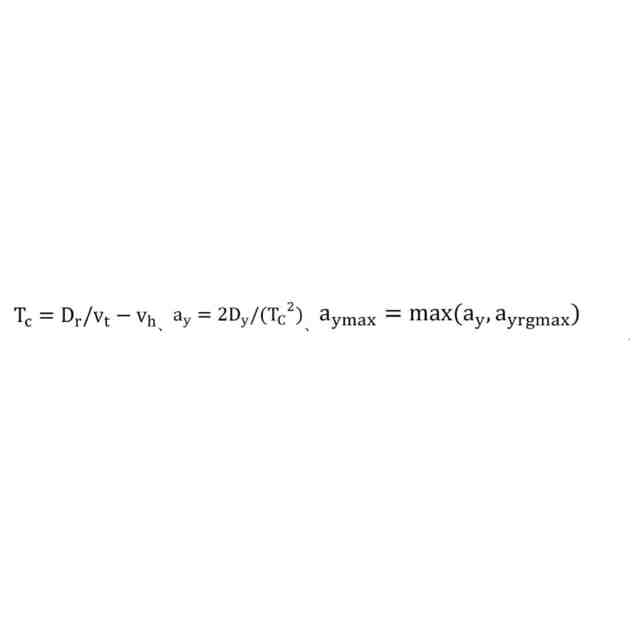
前述実施形態の車線変更用最小リスク決定システムによれば、外因性リスク間隔計算モジュールは、
JPEG
2025088113000002.jpg
13
153
、、
及び
JPEG
2025088113000003.jpg
13
153
を演算することができ、T
c
は衝突時間であり、D
r
は車両と前方物体との間の相対縦距離であり、v
h
は車両の自車速度であり、v
t
は前方物体の前方物体速度であり、a
y
は衝突時間で計算した車両の横加速度であり、a
yrgmax
は最大通常横加速度であり、a
ymax
は横加速度と最大通常横加速度のうちの大きい方であり、D
y
は横距離であり、v
x
は自車速度の縦コンポーネントであり、D
F
は外因性リスク間隔である。
【0008】
前述実施形態の車線変更用最小リスク決定システムによれば、判断ユニットはある時点で外因性リスクまたはシステム故障リスクが発生したと判定する場合、横コンポーネント計算ユニットは、
JPEG
2025088113000004.jpg
13
153
及び
JPEG
2025088113000005.jpg
11
153
を演算することができ、T
Lc
は車線変更時間であり、Lは車両の長さであり、t
ISO limit
は法規による車線横断不可時間であり、a
y
E
は緊急横加速度である。
【0009】
前述実施形態の車線変更用最小リスク決定システムによれば、ある時点での走行可能空間に障害物がなく、且つ緊急横加速度が法規による緊急横加速度の上限以下であると、車線変更して走行可能空間に入ることができ、逆であると、停止するまで減速する。
【0010】
前述実施形態の車線変更用最小リスク決定システムによれば、判断ユニットはある時点で自動運転起動条件不満足リスクが発生したと判定すると、横コンポーネント計算ユニットは通常横加速度で横コンポーネントを計算することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
自動車ケアフル灯
2か月前
ニッタン株式会社
発信機
1か月前
ニッタン株式会社
発信機
1か月前
個人
逆走・正走車両検出システム
1か月前
アズビル株式会社
建物管理システム
14日前
日本信号株式会社
情報提供システム
1か月前
ホーチキ株式会社
異常報知設備
1か月前
ホーチキ株式会社
異常報知設備
26日前
個人
磁気・光学誘導路線による車両の運行制御
1か月前
株式会社JVCケンウッド
情報処理装置
6日前
トヨタ自動車株式会社
配車システム
1か月前
ホーチキ株式会社
非常通報システム
29日前
株式会社フィットネスワン
見守りシステム
1か月前
トヨタ自動車株式会社
障害物検知装置
今日
ユニティガードシステム株式会社
警備監視システム
11日前
Adora株式会社
アプリ使用制御システム
25日前
能美防災株式会社
非常報知システム
1か月前
東亜電子工業株式会社
警報コントローラ
2か月前
シャープ株式会社
駐車場管理装置
22日前
株式会社アドヴィックス
走行支援システム
27日前
トヨタ自動車株式会社
運転支援装置
1か月前
トヨタ自動車株式会社
車両
21日前
株式会社エイビット
工事観測システム
12日前
株式会社アイシン
重畳画像表示装置
1か月前
株式会社アイシン
重畳画像表示装置
1か月前
能美防災株式会社
煙感知器
12日前
日本信号株式会社
情報提供システム及び情報提供方法
19日前
トヨタ自動車株式会社
車間距離制御装置
11日前
トヨタ自動車株式会社
情報機器
14日前
トヨタ自動車株式会社
配車装置
1か月前
株式会社京三製作所
交通信号制御機保守システム
7日前
日本電気株式会社
監視装置、監視方法、及びプログラム
2か月前
株式会社デンソー
車両用注意喚起制御装置
27日前
トヨタ自動車株式会社
警報システム
1か月前
能美防災株式会社
加煙試験器
29日前
株式会社アイシン
地図情報生成システム
19日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ