TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025086021
公報種別
公開特許公報(A)
公開日
2025-06-06
出願番号
2023199788
出願日
2023-11-27
発明の名称
車間距離制御装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
主分類
G08G
1/16 20060101AFI20250530BHJP(信号)
要約
【課題】車間距離制御において、より適切に目標車間距離を設定できる技術を提供する。
【解決手段】車間距離制御装置10において、取得部42は、先行車両のナンバープレートの情報を取得する。設定部44は、取得部42で取得されたナンバープレートの情報に基づいて、先行車両と自車両との目標車間距離を設定する。制御部48は、先行車両と自車両との車間距離が設定部44で設定された目標車間距離になるよう自車両を制御する。
【選択図】図1
特許請求の範囲
【請求項1】
先行車両のナンバープレートの情報を取得する取得部と、
前記取得部で取得されたナンバープレートの情報に基づいて、先行車両と自車両との目標車間距離を設定する設定部と、
先行車両と自車両との車間距離が前記設定部で設定された目標車間距離になるよう自車両を制御する制御部と、
を備えることを特徴とする車間距離制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両に搭載される車間距離制御装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
設定された目標車間距離を保つように自車を先行車に追従走行制御する追従走行制御装置が知られている(たとえば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特許第5729912号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
車間距離制御においては、通常、事前にドライバーが設定した車間距離設定値にもとづいて自車と先行車との間の車間距離を確保するように制御を行う。ここで、先行車のドライバーが、走行している地域に土地勘がなく、付近の道路事情に不慣れな場合、目的地に向かうための右左折時に急減速することを繰り返す可能性がある。このような状況で車間距離が相対的に短い場合、車間距離制御によって自車も急減速したり、ドライバーが自車のブレーキペダルを踏んだりすることが想定される。そのため、自車のドライバーは安心して走行できない可能性がある。
【0005】
本発明の目的は、車間距離制御において、より適切に目標車間距離を設定できる技術を提供することにある。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明のある態様の車間距離制御装置は、先行車両のナンバープレートの情報を取得する取得部と、前記取得部で取得されたナンバープレートの情報に基づいて、先行車両と自車両との目標車間距離を設定する設定部と、先行車両と自車両との車間距離が前記設定部で設定された目標車間距離になるよう自車両を制御する制御部と、を備える。
【発明の効果】
【0007】
本発明によれば、車間距離制御において、より適切に目標車間距離を設定できる技術を提供できる。
【図面の簡単な説明】
【0008】
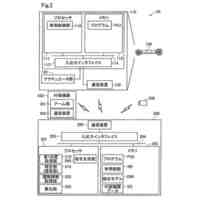
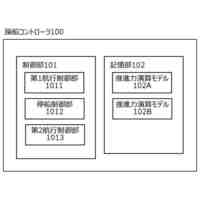
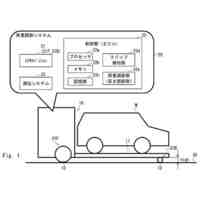
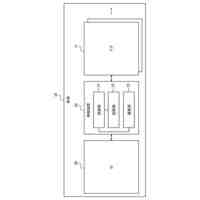
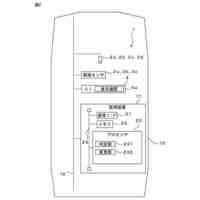
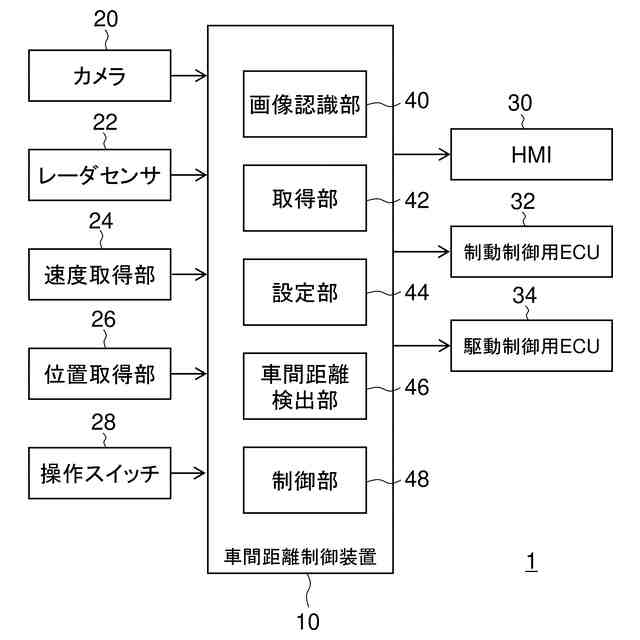
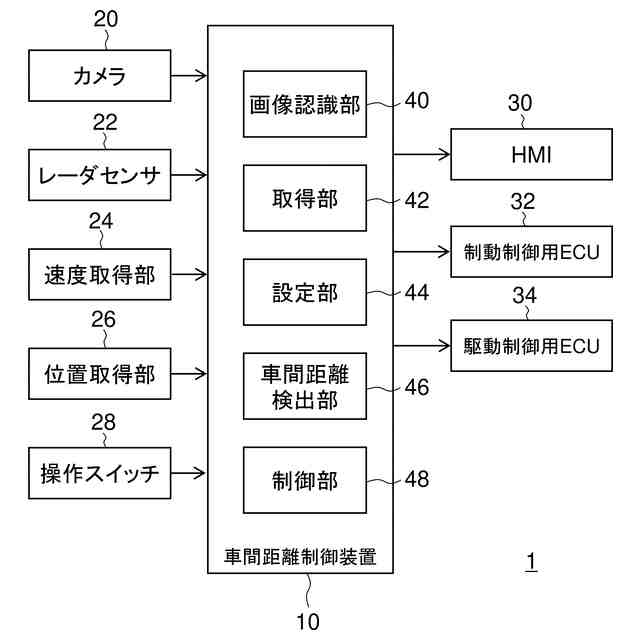
実施の形態の運転支援システムの機能構成を示す図である。
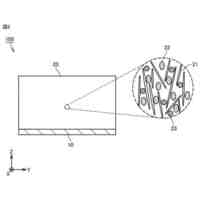
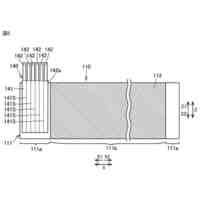
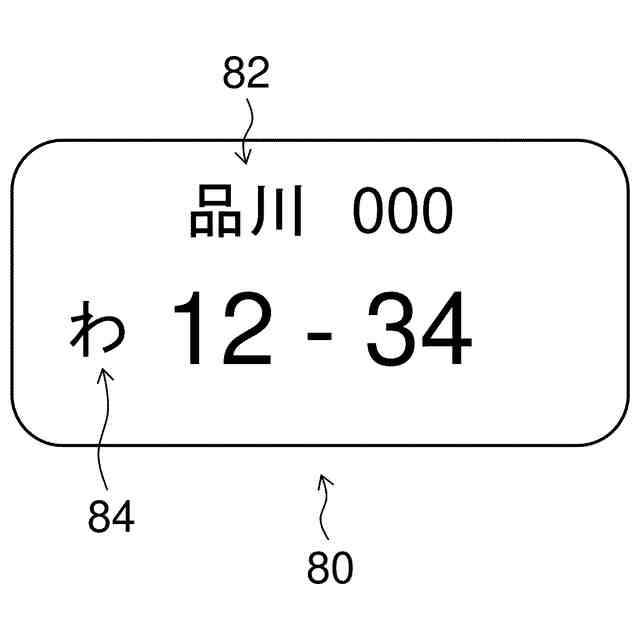
先行車両のナンバープレートの一例を概略的に示す図である。
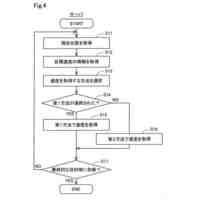
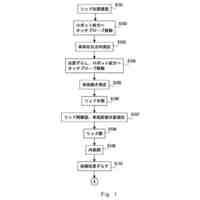
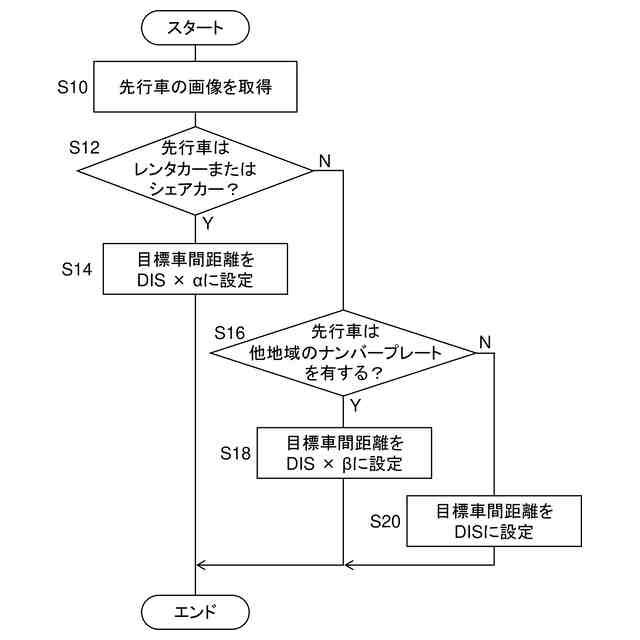
図1の車間距離制御装置の目標車間距離の設定処理を示すフローチャートである。
【発明を実施するための形態】
【0009】
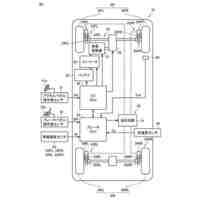
図1は、実施の形態の運転支援システム1の機能構成を示す。運転支援システム1は、車両に搭載され、自車両と先行車両との車間距離が目標車間距離に近づくよう制御する。このような車間距離制御は、ACC(Adaptive Cruise Control)とも呼ばれる。実施の形態では、先行車両のナンバープレートの情報をカメラで検出することで、先行車両がレンタカー等であるか、または、先行車両が走行中の地域とは別の地域から来た可能性があるか特定する。そして、先行車両がレンタカー等であるか、または、先行車両が別の地域から来た可能性のある場合、そうでない場合と比較して、目標車間距離を長く設定する。これにより、先行車両のドライバーが、土地勘がなく、道路事情に不慣れであり、目的地に向かうための右左折時に急減速することを繰り返すような状況であっても、車間距離を相対的に長く保てるため、自車両の安全を確保しやすくできる。そのため、自車両のドライバーは安心して走行しやすくなる。
【0010】
運転支援システム1は、車間距離制御装置10、カメラ20、レーダセンサ22、速度取得部24、位置取得部26、操作スイッチ28、HMI(Human Machine Interface)30、制動制御用ECU(Electronic Control Unit)32、および駆動制御用ECU34を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
電極
3日前
トヨタ自動車株式会社
方法
3日前
トヨタ自動車株式会社
車両
10日前
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
車両
10日前
トヨタ自動車株式会社
車両
10日前
トヨタ自動車株式会社
装置
3日前
トヨタ自動車株式会社
電池
11日前
トヨタ自動車株式会社
電池
3日前
トヨタ自動車株式会社
軸部材
11日前
トヨタ自動車株式会社
自動車
10日前
トヨタ自動車株式会社
ホッパー
6日前
トヨタ自動車株式会社
電源装置
3日前
トヨタ自動車株式会社
監視装置
10日前
トヨタ自動車株式会社
蓄電装置
3日前
トヨタ自動車株式会社
蓄電装置
3日前
トヨタ自動車株式会社
蓄電装置
10日前
トヨタ自動車株式会社
蓄電装置
3日前
トヨタ自動車株式会社
蓄電装置
3日前
トヨタ自動車株式会社
固体電池
3日前
トヨタ自動車株式会社
操船装置
10日前
トヨタ自動車株式会社
電池セル
3日前
トヨタ自動車株式会社
ステータ
3日前
トヨタ自動車株式会社
蓄電装置
3日前
トヨタ自動車株式会社
制御装置
3日前
トヨタ自動車株式会社
運搬車両
11日前
トヨタ自動車株式会社
制御装置
3日前
トヨタ自動車株式会社
判定装置
5日前
トヨタ自動車株式会社
充電装置
5日前
トヨタ自動車株式会社
蓄電セル
6日前
トヨタ自動車株式会社
電池セル
3日前
トヨタ自動車株式会社
電動車両
6日前
トヨタ自動車株式会社
制御装置
3日前
トヨタ自動車株式会社
電池パック
3日前
トヨタ自動車株式会社
粘着シート
4日前
トヨタ自動車株式会社
電池パック
11日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ