TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025094967
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2023210675
出願日
2023-12-14
発明の名称
装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人明成国際特許事務所
主分類
G06T
7/70 20170101AFI20250619BHJP(計算;計数)
要約
【課題】外部センサによる車両の適切な検出が妨げられ得る状況であっても、適切に車両の位置や向きを取得できる技術を提供する。
【解決手段】装置は、無人運転によって移動可能な移動体に連動する機器の運動状態に関する運動情報を取得する運動情報取得部と、取得された前記運動情報を用いて、前記移動体の位置と向きとの少なくとも一方を算出する算出部と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
無人運転によって移動可能な移動体に連動する機器の運動状態に関する運動情報を取得する運動情報取得部と、
取得された前記運動情報を用いて、前記移動体の位置と向きとの少なくとも一方を算出する算出部と、を備える、装置。
続きを表示(約 540 文字)
【請求項2】
請求項1に記載の装置であって、
前記機器を特定する特定部をさらに備え、
前記運動情報取得部は、前記特定部によって特定された前記機器について前記運動情報を取得する、装置。
【請求項3】
請求項1又は2に記載のシステムであって、
前記算出部は、前記機器と前記移動体とが連動する連動状態が、前記機器と前記移動体とが連動しない非連動状態に遷移した場合に、前記移動体の外部に位置する外部センサによる前記移動体の検出結果を用いて、前記移動体の位置と向きの少なくとも一方を算出する、装置。
【請求項4】
請求項1又は2に記載のシステムであって、
前記機器と前記移動体とが連動する連動状態が、前記機器と前記移動体とが連動しない非連動状態に遷移した場合に、前記移動体に連動して動く機器の探索を実行する探索部を備える、装置。
【請求項5】
請求項4に記載の装置であって、
前記算出部は、前記移動体に連動して動く機器が前記探索によって特定されなかった場合に、前記移動体の外部に位置する外部センサによる前記移動体の検出結果を用いて、前記移動体の位置と向きとの少なくとも一方を算出する、装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、装置に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
特許文献1には、車両外部のカメラを用いて車両を撮像し、カメラによる撮像画像を車両の自動走行に利用する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2015-074321号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
車両のような移動体を無人運転によって移動させる場合、移動体の外部に位置する外部センサにより移動体を検出した結果に基づいて移動体の位置や向きを取得する技術を利用できる。しかしながら、例えば、外部センサと移動体との間に障害物がある場合、外部センサによって移動体を適切に検出できず、移動体の位置や向きを適切に取得できない虞がある。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
(1)本開示の一形態によれば、装置が提供される。この装置は、無人運転によって移動可能な移動体に連動する機器の運動状態に関する運動情報を取得する運動情報取得部と、取得された前記運動情報を用いて、前記移動体の位置と向きとの少なくとも一方を算出する算出部と、を備える。
この形態によれば、外部センサによる車両の適切な検出が妨げられ得る状況であっても、車両の位置や向きを適切に取得できる。
(2)上記形態では、前記機器を特定する特定部をさらに備え、前記運動情報取得部は、前記特定部によって特定された前記機器について前記運動情報を取得してもよい。この形態によれば、連動機器の運動情報をより適切に取得できる。
(3)上記形態では、前記算出部は、前記機器と前記移動体とが連動する連動状態が、前記機器と前記移動体とが連動しない非連動状態に遷移した場合に、前記移動体の外部に位置する外部センサによる前記移動体の検出結果を用いて、前記移動体の位置と向きの少なくとも一方を算出してもよい。この形態によれば、連動状態において車両位置情報を適切に取得できるだけでなく、連動状態が非連動状態に遷移した場合にも車両位置情報を適切に取得できる。
(4)上記形態では、前記機器と前記移動体とが連動する連動状態が、前記機器と前記移動体とが連動しない非連動状態に遷移した場合に、前記移動体に連動して動く機器の探索を実行する探索部を備えていてもよい。この形態によれば、連動状態が非連動状態に遷移した場合であっても、車両と連動する連動機器を新たに探索し、探索された連動機器の運動情報を用いて車両位置情報を算出することができる。
(5)上記形態では、前記算出部は、前記移動体に連動して動く機器が前記探索によって特定されなかった場合に、前記移動体の外部に位置する外部センサによる前記移動体の検出結果を用いて、前記移動体の位置と向きとの少なくとも一方を算出してもよい。この形態によれば、連動状態が非連動状態に遷移した場合の探索において、移動体に連動して動く機器が特定されなかった場合であっても、車両位置情報を適切に取得できる。
本開示は、上述した装置としての形態以外にも、例えば、システムや、制御方法や、プログラムや、プログラムが記録された一時的でない記録媒体や、プログラム製品などの形態で実現することができる。なお、当該プログラム製品は、例えば、プログラムが記録された記録媒体として提供されてもよいし、ネットワークを介して配信可能なプログラム製品として提供されてもよい。
【図面の簡単な説明】
【0007】
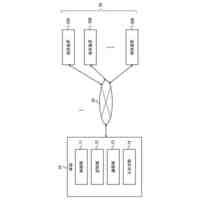
第1実施形態におけるシステムの構成を示す概念図。
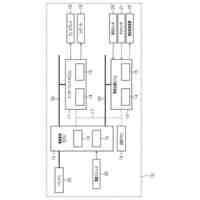
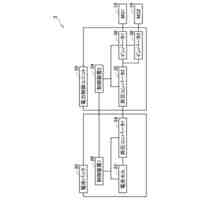
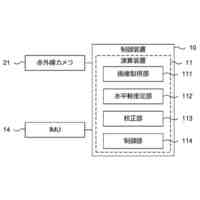
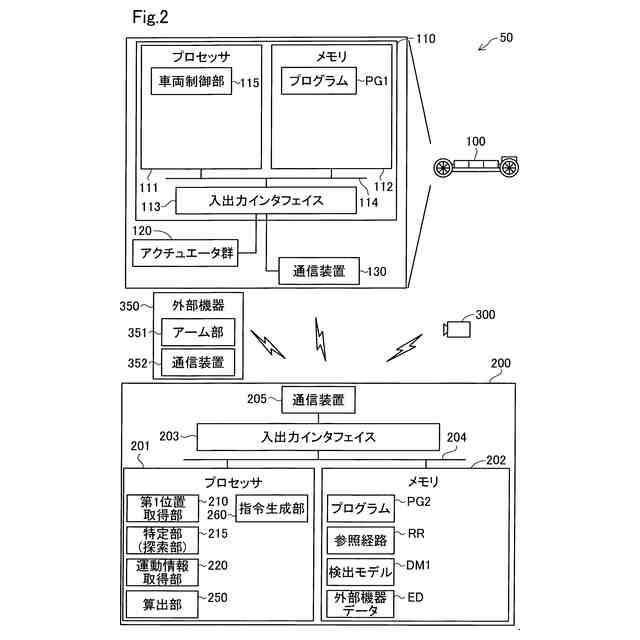
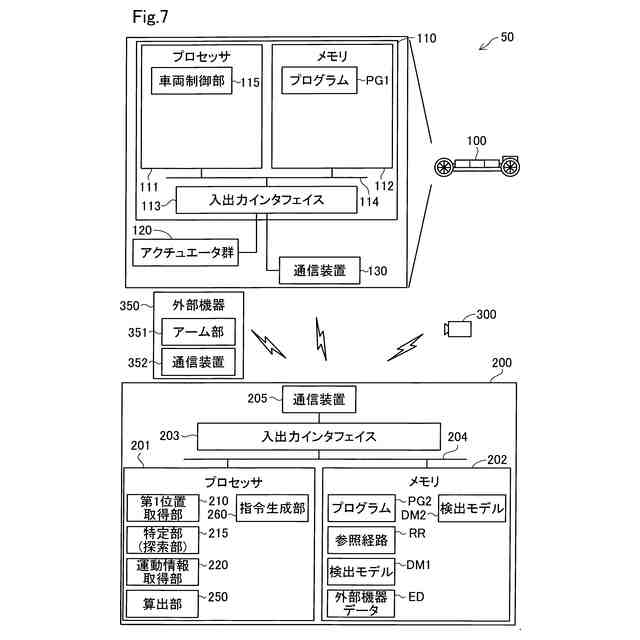
第1実施形態におけるシステムの構成を示すブロック図。
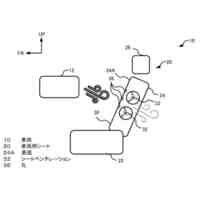
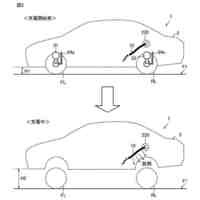
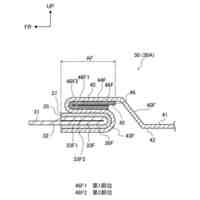
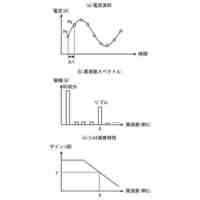
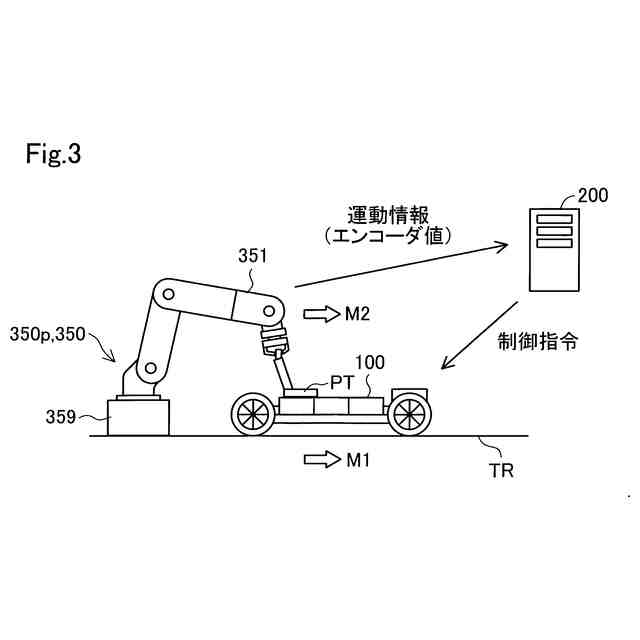
第1実施形態における連動状態を説明する図。
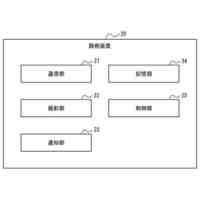
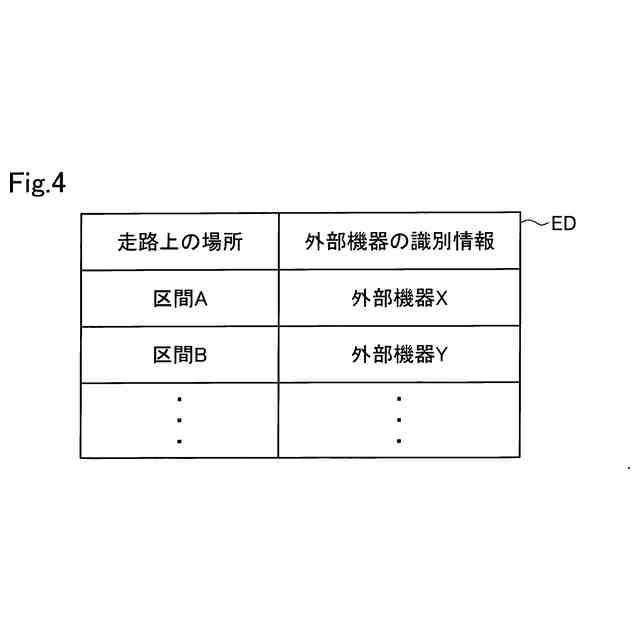
機器データベースの例を説明する図。
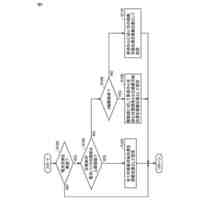
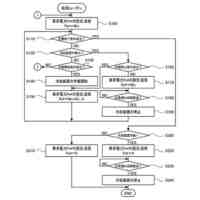
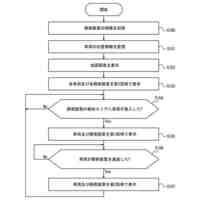
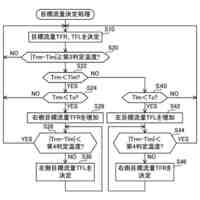
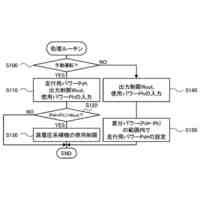
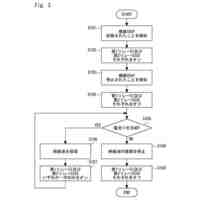
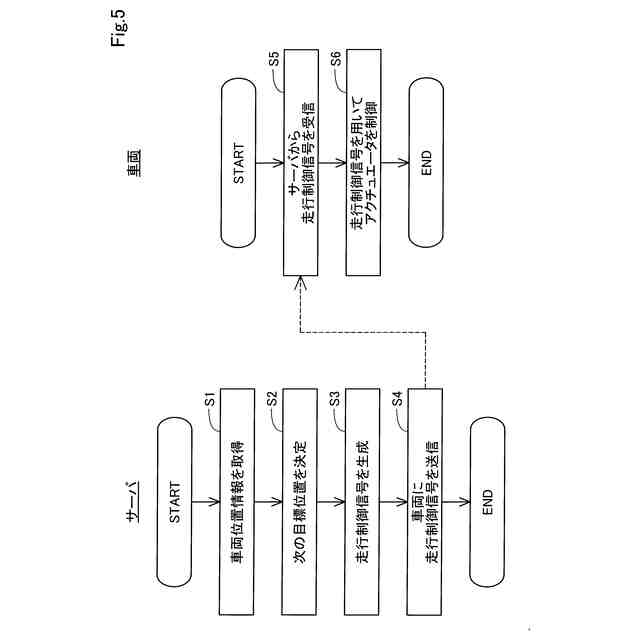
第1実施形態における車両の走行制御の処理手順を示すフローチャート。
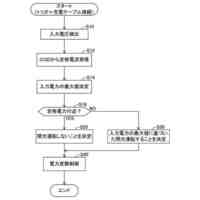
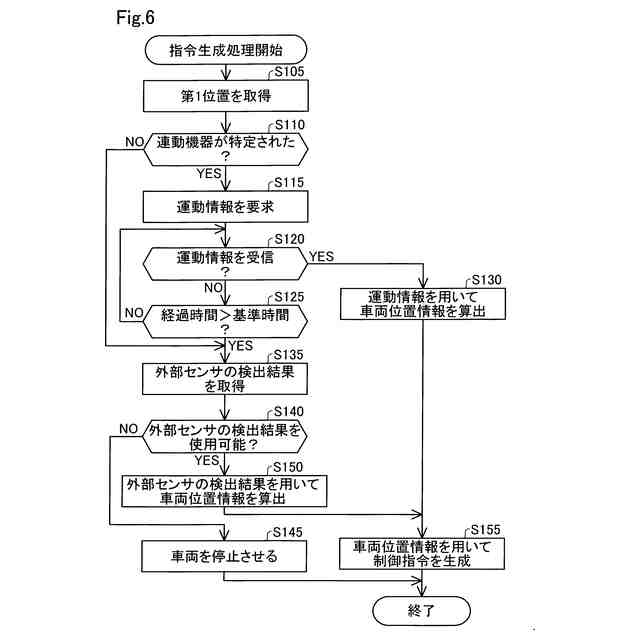
第1実施形態における指令生成処理の処理手順を示すフローチャート。
第2実施形態におけるシステムの構成を示すブロック図。
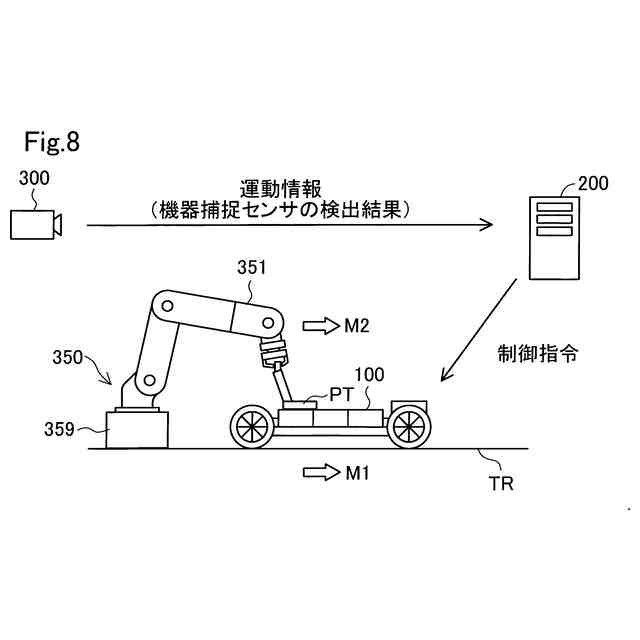
第2実施形態における連動状態を説明する図。
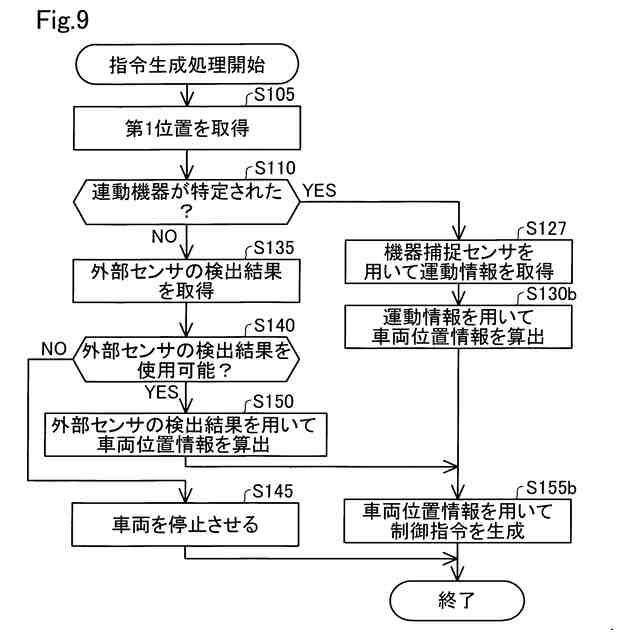
第2実施形態における指令生成処理のフローチャート。
第3実施形態における指令生成処理のフローチャート。
第4実施形態におけるシステムの構成を示すブロック図。
第4実施形態における車両の走行制御の処理手順を示すフローチャート。
【発明を実施するための形態】
【0008】
A.第1実施形態:
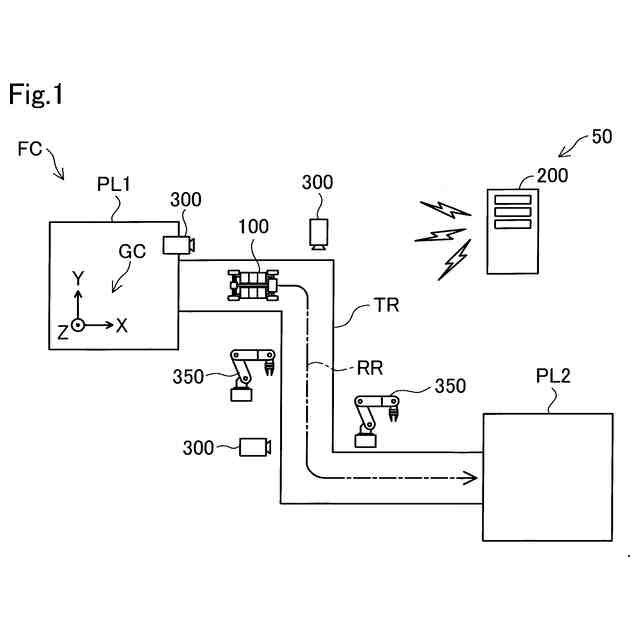
図1は、第1実施形態におけるシステム50の構成を示す概念図である。システム50は、1以上の車両100と、サーバ200と、1以上の外部センサ300と、外部機器350とを備える。第1実施形態におけるサーバ200は、本開示における「装置」に相当する。
【0009】
車両100は、車輪によって走行する車両であっても無限軌道によって走行する車両であってもよく、例えば、乗用車、トラック、バス、二輪車、四輪車、戦車、工事用車両などである。本実施形態では、車両100は、電気自動車(BEV:Battery Electric Vehicle)である。車両100は、例えば、ガソリン自動車や、ハイブリッド自動車や、燃料電池自動車であってもよい。
【0010】
車両100は、無人運転により走行可能に構成されている。「無人運転」とは、搭乗者の走行操作によらない運転を意味する。走行操作とは、車両100の「走る」、「曲がる」、「止まる」の少なくともいずれかに関する操作を意味する。無人運転は、車両100の外部に位置する装置を用いた自動または手動の遠隔制御によって、あるいは、車両100の自律制御によって実現される。無人運転によって走行している車両100には、走行操作を行わない搭乗者が搭乗していてもよい。走行操作を行わない搭乗者には、例えば、単に車両100の座席に着座している人や、組み付け、検査、スイッチ類の操作といった走行操作とは異なる作業を車両100に乗りながら行っている人が含まれる。なお、搭乗者の走行操作による運転は、「有人運転」と呼ばれることがある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
方法
1か月前
トヨタ自動車株式会社
膜体
6日前
トヨタ自動車株式会社
方法
28日前
トヨタ自動車株式会社
車両
27日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
19日前
トヨタ自動車株式会社
車両
20日前
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
車両
18日前
トヨタ自動車株式会社
車両
28日前
トヨタ自動車株式会社
方法
21日前
トヨタ自動車株式会社
電池
21日前
トヨタ自動車株式会社
方法
4日前
トヨタ自動車株式会社
方法
18日前
トヨタ自動車株式会社
車両
25日前
トヨタ自動車株式会社
電極
28日前
トヨタ自動車株式会社
電動車
20日前
トヨタ自動車株式会社
電動車
27日前
トヨタ自動車株式会社
充電器
21日前
トヨタ自動車株式会社
電動車
21日前
トヨタ自動車株式会社
移動体
20日前
トヨタ自動車株式会社
モータ
20日前
トヨタ自動車株式会社
電極体
26日前
トヨタ自動車株式会社
充電器
18日前
トヨタ自動車株式会社
モータ
18日前
トヨタ自動車株式会社
モータ
27日前
トヨタ自動車株式会社
制御装置
6日前
トヨタ自動車株式会社
電極触媒
19日前
トヨタ自動車株式会社
燃料電池
18日前
トヨタ自動車株式会社
路側装置
18日前
トヨタ自動車株式会社
電動車両
28日前
トヨタ自動車株式会社
充電方法
18日前
トヨタ自動車株式会社
電源装置
20日前
トヨタ自動車株式会社
コネクタ
20日前
トヨタ自動車株式会社
記録装置
26日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ