TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025107836
公報種別
公開特許公報(A)
公開日
2025-07-22
出願番号
2024001322
出願日
2024-01-09
発明の名称
制御装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
主分類
H04N
23/60 20230101AFI20250714BHJP(電気通信技術)
要約
【課題】水平軸を推定する。
【解決手段】制御装置は、移動体の周囲の少なくとも一部が含まれる赤外線画像を取得する取得手段と、赤外線画像により示される大気の温度分布に基づいて、仮想的な水平軸を推定する推定手段と、を備える。
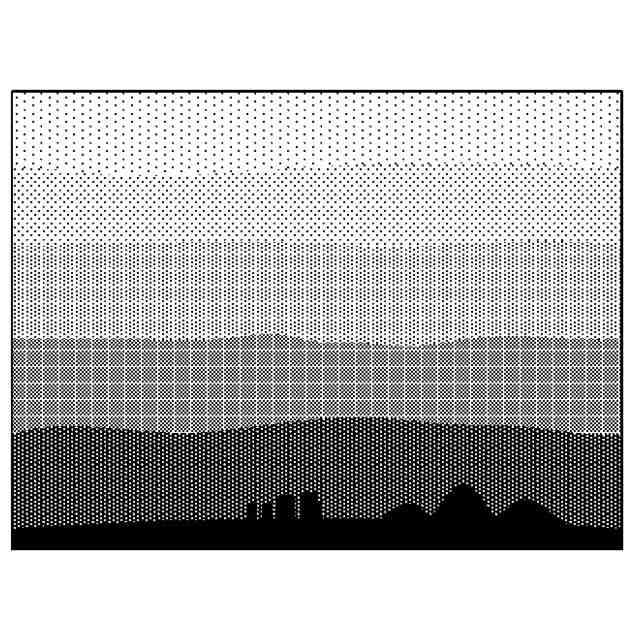
【選択図】図3
特許請求の範囲
【請求項1】
移動体の周囲の少なくとも一部が含まれる赤外線画像を取得する取得手段と、
前記赤外線画像により示される大気の温度分布に基づいて、仮想的な水平軸を推定する推定手段と、
を備えることを特徴とする制御装置。
続きを表示(約 510 文字)
【請求項2】
前記取得手段は、前記少なくとも一部が含まれる可視光画像を取得し、
前記可視光画像に、大気以外の物体が含まれている場合に、前記赤外線画像における、前記物体に対応する領域にマスク処理を施す処理手段を備え、
前記推定手段は、前記マスク処理が施された前記赤外線画像により示される大気の温度分布に基づいて、前記仮想的な水平軸を推定する
ことを特徴とする請求項1に記載の制御装置。
【請求項3】
前記推定手段は、前記赤外線画像に占める前記マスク処理が施された領域に基づいて、前記仮想的な水平軸の信頼度を推定する
ことを特徴とする請求項2に記載の制御装置。
【請求項4】
前記可視光画像に占める、雲に対応する領域の割合が所定値以上である場合に、前記移動体の高度を上げる制御手段を備える
ことを特徴とする請求項2に記載の制御装置。
【請求項5】
前記移動体の姿勢を計測する計測手段と、
前記仮想的な水平軸に基づいて、前記計測された姿勢を校正する校正手段と、
を備えることを特徴とする請求項1乃至4に記載の制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体の制御装置の技術分野に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
この種の装置として、例えば、航空機の高度検出部の高度信号と、航空機の視軸指向角度検出部の角度信号とから、赤外線カメラにより撮像された画像における水平線の位置を算出し、該算出された水平線を中心とする領域内のコントラストが強調されるように輝度変換を行う装置が提案されている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開平9-130680号広報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の技術には改善の余地がある。
【0005】
本発明は、例えば、上記事情に鑑みてなされたものであり、水平軸を推定することができる制御装置を提供することを課題とする。
【課題を解決するための手段】
【0006】
本発明の一態様に係る制御装置は、移動体の周囲の少なくとも一部が含まれる赤外線画像を取得する取得手段と、前記赤外線画像により示される大気の温度分布に基づいて、仮想的な水平軸を推定する推定手段と、を備えるというものである。
【図面の簡単な説明】
【0007】
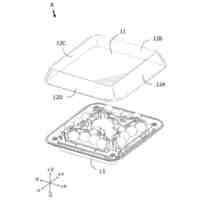
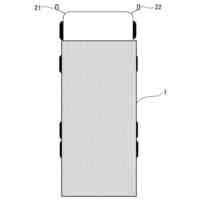
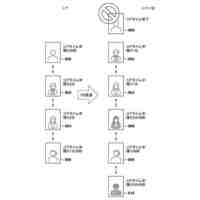
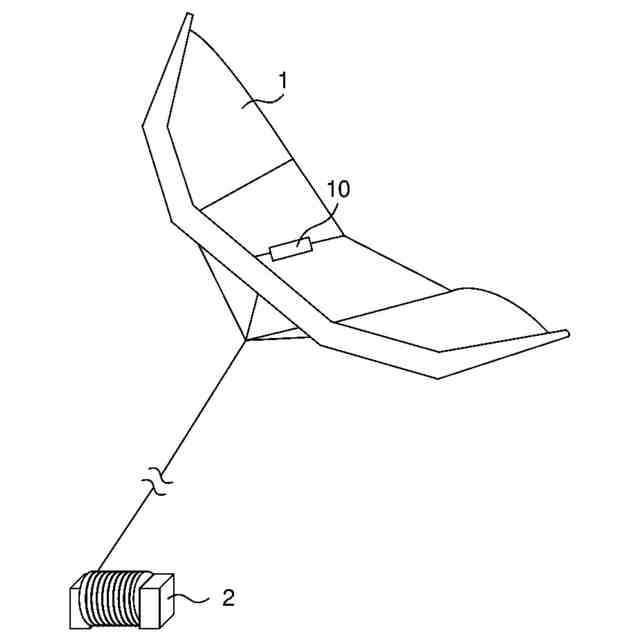
カイトの一例を示す図である。
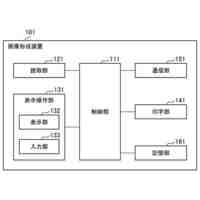
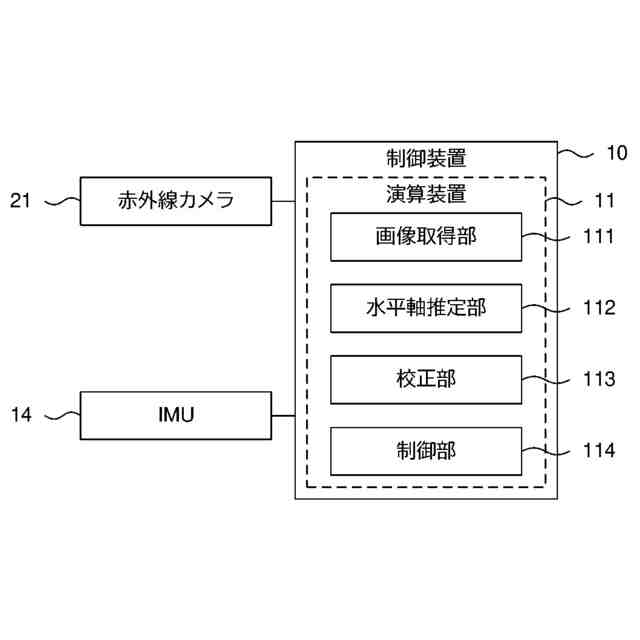
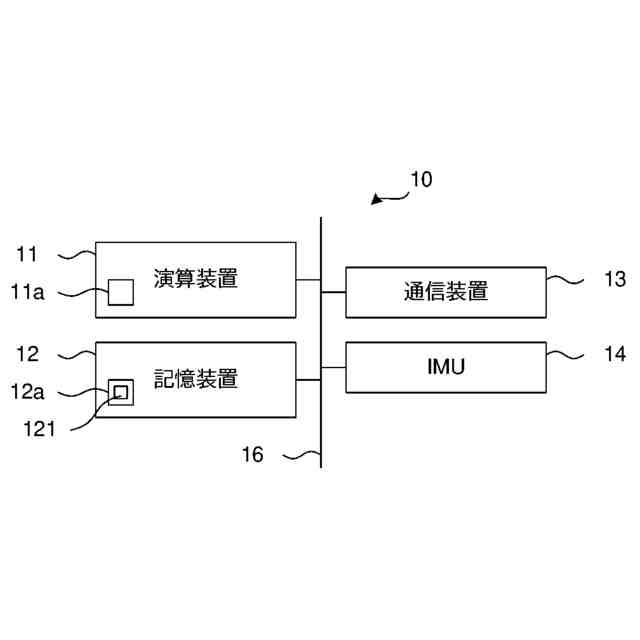
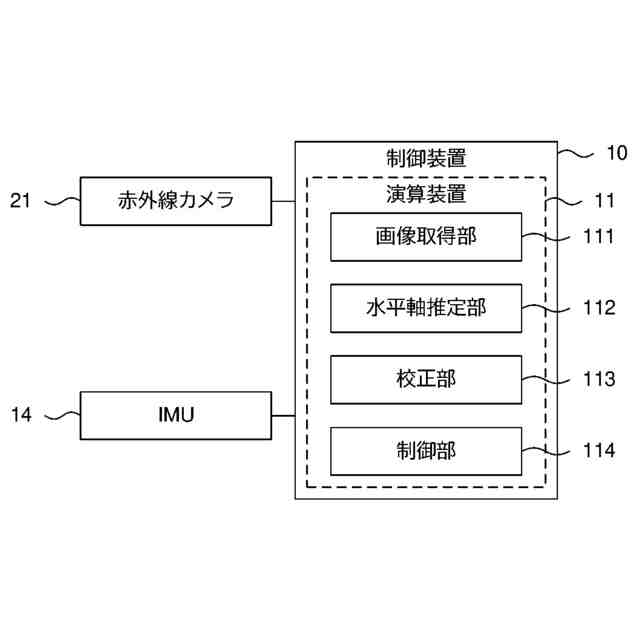
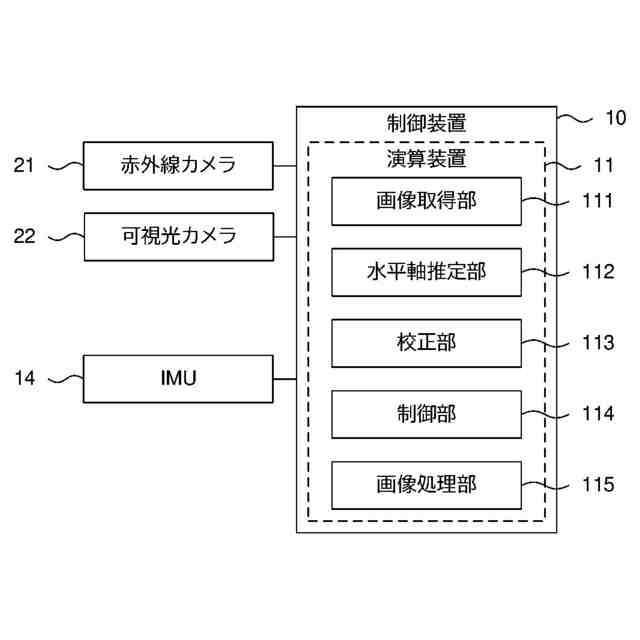
実施形態に係る制御装置の構成の一例を示すブロック図である。
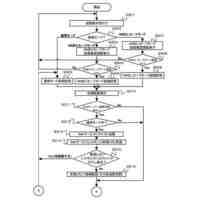
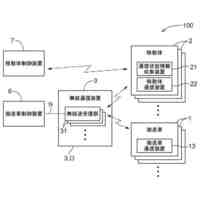
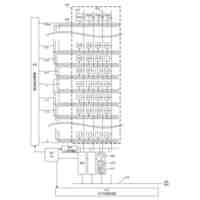
実施形態に係る演算装置の構成の一例を示すブロック図である。
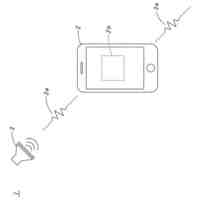
赤外線画像を模式的に示す模式図である。
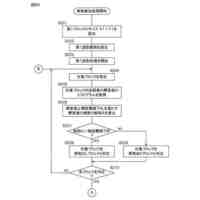
実施形態に係る演算装置の構成の他の例を示すブロック図である。
【発明を実施するための形態】
【0008】
<第1実施形態>
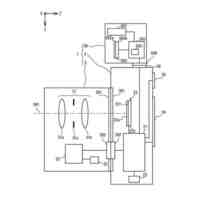
制御装置に係る第1実施形態について図1乃至図4を参照して説明する。実施形態では、移動体の一例としてカイトを挙げる。ただし、移動体は、カイトに限られない。移動体には、空中を移動する移動体(言い換えれば、飛行体)、及び、地上を移動する移動体が含まれていてよい。移動体は、無人の移動体であってもよいし、有人の移動体であってもよい。移動体は、自律移動可能な移動体であってもよい。
【0009】
図1において、カイト1は、テザー(凧糸)によって、テザーが巻き回されているドラムを有する設備2に係留されている。尚、設備2は、地面に設置されていてもよいし、構造物に設置されていてもよいし、例えば車両や船舶等の上記ドラムを運搬可能なものに設置されていてもよい。カイト1は、例えばインフレータブルカイトであってよい。ただし、カイト1は、インフレータブルカイトに限定されない。
【0010】
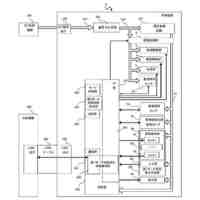
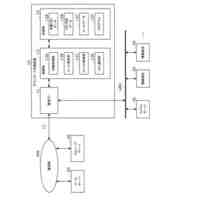
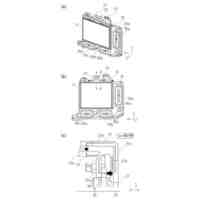
カイト1には、制御装置10が取り付けられている。尚、制御装置10は、カイト1に取り付けられていなくてもよい。例えば、設備2が制御装置10を有していてもよい。制御装置10について図2を参照して説明する。図2において、制御装置10は、演算装置11、記憶装置12、通信装置13及びIMU(Inertial Measurement Unit)14を備える。演算装置11、記憶装置12、通信装置13及びIMU14は、データバス16を介して接続されていてよい。尚、制御装置10は、演算装置11、記憶装置12、通信装置13及びIMU14に加えて、入力装置及び出力装置の少なくとも一方を備えていてよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
店内配信予約システム
1か月前
サクサ株式会社
中継装置
1か月前
キヤノン株式会社
電子機器
29日前
キヤノン株式会社
撮像装置
1か月前
日本精機株式会社
画像投映システム
1か月前
株式会社リコー
画像形成装置
7日前
ヤマハ株式会社
信号処理装置
1か月前
電気興業株式会社
無線中継器
1か月前
キヤノン電子株式会社
モバイル装置
1か月前
キヤノン株式会社
通信システム
2か月前
ブラザー工業株式会社
読取装置
2日前
株式会社ニコン
撮像装置
17日前
パテントフレア株式会社
水中電波通信法
11日前
DXO株式会社
情報処理システム
14日前
キヤノン電子株式会社
シート材搬送装置
3日前
株式会社オーディオテクニカ
受光器
1か月前
テックス通信株式会社
電話システム
1か月前
個人
外部ヘッダ変換通信装置および通信網
1か月前
住友建機株式会社
表示システム
1か月前
シャープ株式会社
画像形成装置
3日前
八重洲無線株式会社
無線中継システム
1か月前
サクサ株式会社
ダウンロード支援装置
3日前
キヤノン株式会社
移動体
2か月前
アルプスアルパイン株式会社
音響装置
1か月前
株式会社ダイフク
搬送設備
1か月前
株式会社エクシング
双方向通信システム
10日前
株式会社ダイフク
搬送設備
1か月前
17LIVE株式会社
サーバおよび方法
2日前
キヤノン株式会社
測距装置
1か月前
キヤノン株式会社
撮像装置
2か月前
キヤノン株式会社
撮像装置
1か月前
学校法人立命館
情報埋め込み方法
9日前
日本放送協会
良撮影位置推定装置
2か月前
アイホン株式会社
インターホンシステム
1か月前
17LIVE株式会社
サーバおよび方法
1か月前
アイホン株式会社
インターホンシステム
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ