TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025082419
公報種別
公開特許公報(A)
公開日
2025-05-29
出願番号
2023195721
出願日
2023-11-17
発明の名称
情報提供システム及び情報提供方法
出願人
日本信号株式会社
代理人
個人
主分類
G08G
1/09 20060101AFI20250522BHJP(信号)
要約
【課題】インフラのセンサが車両を検知できなかった場合であっても、信頼性の低下を抑えつつ継続的に情報を提供すること。
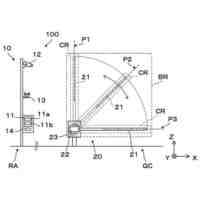
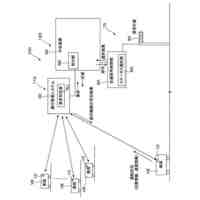
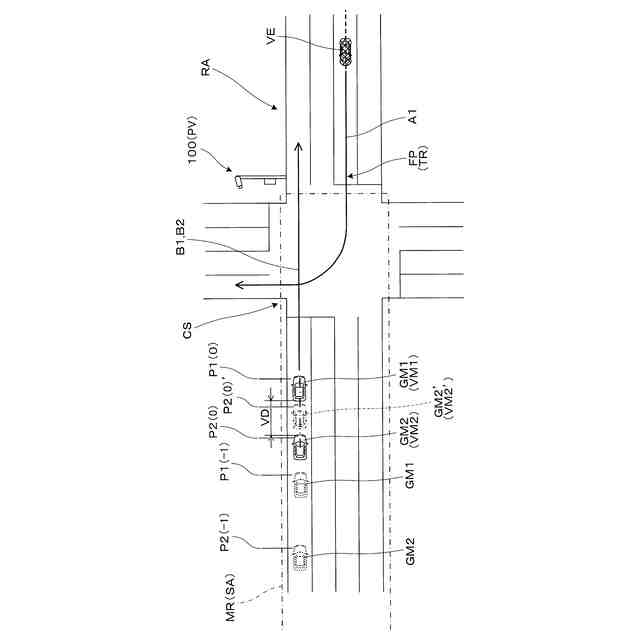
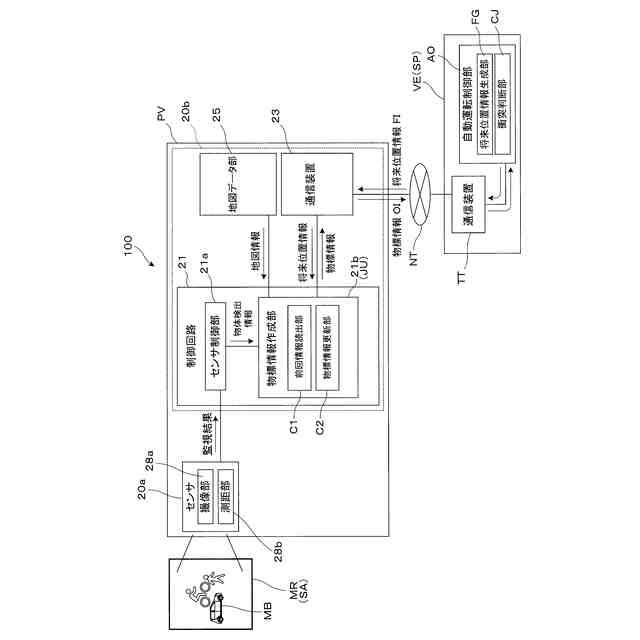
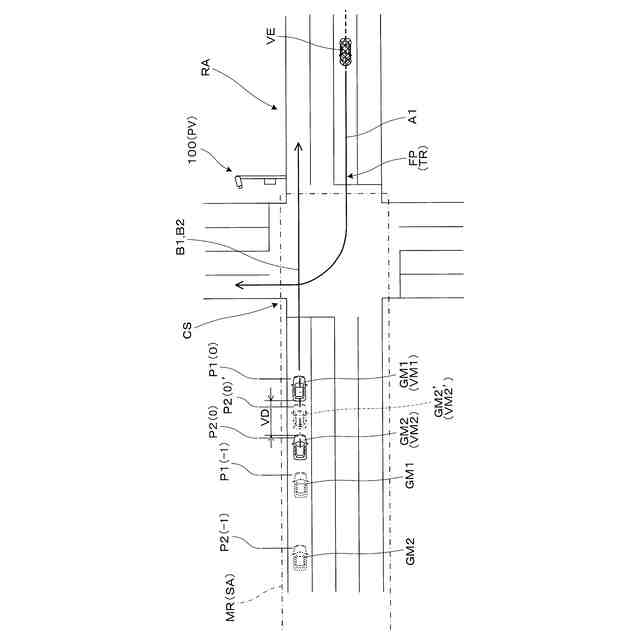
【解決手段】情報提供システム100は、支援対象車両SPと通信し監視範囲MRを監視する運転支援装置PVを備え、運転支援装置PVは、支援対象車両SPに監視範囲MR内の監視結果を送信する判定部JUを有し、判定部JUである物標情報作成部21bが、監視範囲MR内を走行する着目車両VM2の現在の更新位置P2(0)’を過去に取得した既定位置P2(-1)を含む既定情報から推定し、環境的状況を加味して更新位置P2(0)’を補正する。
【選択図】図6
特許請求の範囲
【請求項1】
支援対象車両と通信し監視範囲を監視する運転支援装置を備え、
前記運転支援装置は、前記支援対象車両に前記監視範囲内の監視結果を送信する判定部を有し、
前記判定部は、前記監視範囲内を走行する着目車両の現在の更新位置を過去に取得した既定位置を含む既定情報から推定し、環境的状況を加味して前記更新位置を補正する、
情報提供システム。
続きを表示(約 960 文字)
【請求項2】
前記判定部は、前記着目車両の現在位置を直接的に取得することができた場合、前記更新位置と前記現在位置とを比較する照合を行う、
請求項1に記載の情報提供システム。
【請求項3】
前記判定部は、前記更新位置と前記現在位置とが一致する場合、計測された前記現在位置を前記監視結果として送信し、
前記判定部は、前記更新位置と前記現在位置とが一致しない場合、計測された前記現在位置を前記監視結果として送信する、
請求項2に記載の情報提供システム。
【請求項4】
前記判定部は、前記着目車両の現在位置を直接的に取得することができなかった場合、補正された前記更新位置を前記監視結果として送信する、
請求項1に記載の情報提供システム。
【請求項5】
前記判定部は、前記着目車両の現在位置を所定回数以上連続して直接的に取得することができなかった場合、前記更新位置を含まない前記監視結果を前記支援対象車両に送信する、
請求項4に記載の情報提供システム。
【請求項6】
前記判定部は、前記着目車両に先行車両が存在する場合、前記先行車両と前記着目車両との車間を調整するように前記更新位置を補正する、
請求項1に記載の情報提供システム。
【請求項7】
前記判定部は、前記既定情報から推定された前記更新位置を、前記先行車両と前記着目車両との間に所定の車間距離が保持されるように補正する、
請求項6に記載の情報提供システム。
【請求項8】
前記判定部は、前記車間距離を、前記着目車両の前記既定情報に含まれる速度に基づいて設定する、
請求項7に記載の情報提供システム。
【請求項9】
前記判定部は、前記着目車両に関する前記既定位置と、前記既定位置における速度及び進行方向とに基づく予測として、前記更新位置を計算する、
請求項1に記載の情報提供システム。
【請求項10】
前記判定部は、過去に取得した複数の前記既定位置から外挿して、前記更新位置を計算する、
請求項9に記載の情報提供システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、監視範囲内を走行する着目車両の現在の更新位置を過去に取得した既定位置を含む既定情報から推定する情報提供システム及び情報提供方法に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
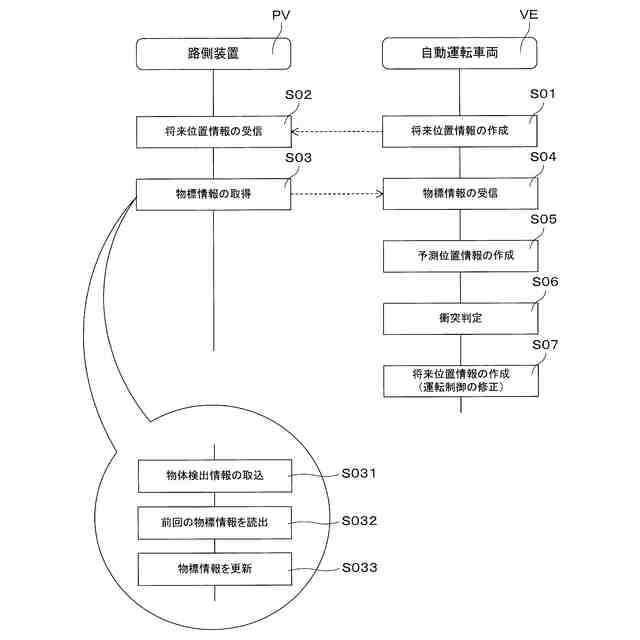
自動運転車両である自車を他の物体から識別する情報提供システムとして、監視領域に存在する物体の物体位置情報を取得する物体情報取得部と、自動運転車両から送信される自己位置情報を受け付ける車両情報受付部と、照合部による照合結果に基づき監視領域において自動運転車両を他の物体から識別する識別部とを備えるものが公知となっている(特許文献1)。
【0003】
安全運転支援システムに組み込まれる車両検知装置として、道路画像から得られた走行車両の位置を車両位置として特定する車両位置特定部と、車両位置判定部により車両位置が道路外の位置であると判定された場合、車両位置記憶部に記憶された走行車両の過去位置に基づいて道路内の特定位置を補正位置として決定し、決定した補正位置を走行車両の現在位置として車両位置記憶部に記憶する車両位置補正部とを備えるものが公知となっている(特許文献2)。
【0004】
上記特許文献1の手法では、システムが自動運転車両からそれ自体の将来位置情報を受け取るが、監視対象の将来位置情報を予測するものではない。上記特許文献2の手法では、車両位置が道路外である場合に補正位置を走行車両の現在位置とするが、センサによって監視対象の現在位置が取得されていることが前提であり、センサが車両を検知できなかった場合、インフラ側からの物標情報が不足し、物標情報を受け取っている自動運転車両等での情報判断が不正確になる可能性がある。
【先行技術文献】
【特許文献】
【0005】
特開2023-50630号公報
特開2011-8505号公報
【発明の概要】
【0006】
本発明は、上記背景に鑑みてなされたものであり、インフラのセンサが車両を検知できなかった場合であっても、信頼性の低下を抑えつつ継続的に情報を提供することを目的とする。
【0007】
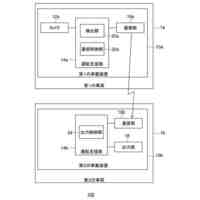
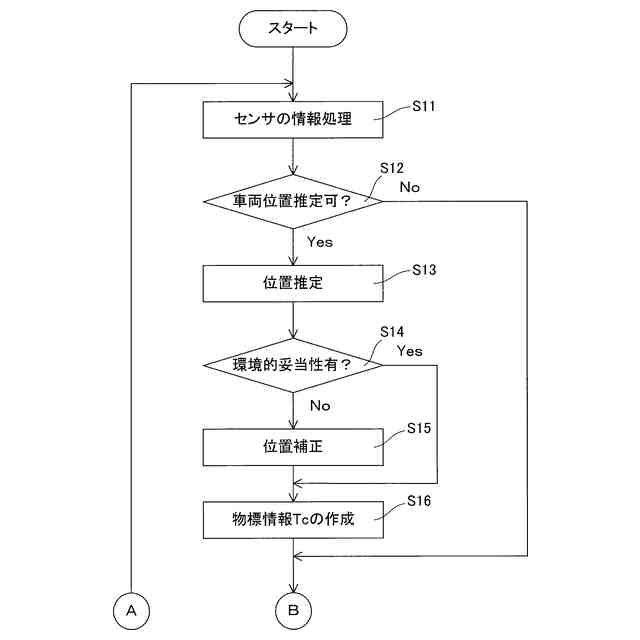
上記目的を達成するため、本発明に係る情報提供システムは、支援対象車両と通信し監視範囲を監視する運転支援装置を備え、運転支援装置は、支援対象車両に監視範囲内の監視結果を送信する判定部を有し、判定部は、監視範囲内を走行する着目車両の現在の更新位置を過去に取得した既定位置を含む既定情報から推定し、環境的状況を加味して更新位置を補正する。
【0008】
上記情報提供システムでは、判定部が、着目車両の現在の更新位置を過去に取得した既定位置を含む既定情報から推定し、環境的状況を加味して更新位置を補正するので、支援対象車両に対して着目車両の更新位置を監視結果として送信することができ、連続すべき位置情報に欠落が生じることを抑制することができる。この際、特に判定部が環境的状況を加味して更新位置を補正するので、更新位置の推定に着目車両を取り巻く環境的状況との関係で矛盾又は不整合が生じることを回避することができる。
【0009】
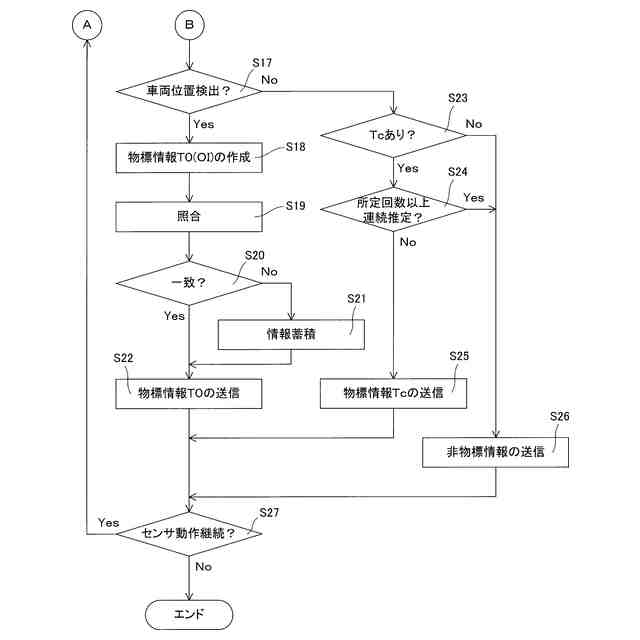
本発明の具体的な側面によれば、上記情報提供システムにおいて、判定部は、着目車両の現在位置を直接的に取得することができた場合、更新位置と現在位置とを比較する照合を行う。これにより、更新位置の予測精度を実測値としての現在位置に基づいて評価することができる。
【0010】
本発明の別の側面によれば、判定部は、更新位置と現在位置とが一致する場合、計測された現在位置を監視結果として送信し、判定部は、更新位置と現在位置とが一致しない場合、計測された現在位置を監視結果として送信する。実測値としての現在位置を優先することで、情報の信頼性を確保することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
路面投影装置
18日前
ニッタン株式会社
発信機
13日前
ニッタン株式会社
発信機
2か月前
ニッタン株式会社
発信機
24日前
個人
防犯に特化したアプリケーション
26日前
ニッタン株式会社
発信機
2か月前
東京都公立大学法人
液滴検出装置
26日前
TOA株式会社
拡声放送システム
17日前
日本信号株式会社
情報提供システム
11日前
アズビル株式会社
建物管理システム
1か月前
株式会社アジラ
データ転送システム
17日前
個人
乗り物の移動を支援する方法及び装置
4日前
株式会社JVCケンウッド
警報装置
12日前
日本信号株式会社
信号情報システム
11日前
ホーチキ株式会社
異常報知設備
2か月前
ホーチキ株式会社
異常報知設備
1か月前
株式会社JVCケンウッド
情報処理装置
1か月前
日本信号株式会社
交通信号制御システム
11日前
トヨタ自動車株式会社
回避動作判別装置
11日前
個人
磁気・光学誘導路線による車両の運行制御
2か月前
ホーチキ株式会社
火災検出システム
12日前
株式会社フィットネスワン
見守りシステム
2か月前
ホーチキ株式会社
非常通報システム
2か月前
株式会社豊田自動織機
制御システム
17日前
トヨタ自動車株式会社
配車システム
2か月前
トヨタ自動車株式会社
障害物検知装置
1か月前
Adora株式会社
アプリ使用制御システム
1か月前
ユニティガードシステム株式会社
警備監視システム
1か月前
個人
注意喚起システム及び注意喚起装置
17日前
大和ハウス工業株式会社
住環境管理設備
12日前
能美防災株式会社
火災感知器窓部清掃システム
1か月前
トヨタ自動車株式会社
方法
10日前
シャープ株式会社
駐車場管理装置
1か月前
株式会社エイビット
工事観測システム
1か月前
株式会社アドヴィックス
走行支援システム
2か月前
トヨタ自動車株式会社
運転支援装置
12日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ