TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025087982
公報種別
公開特許公報(A)
公開日
2025-06-11
出願番号
2023202343
出願日
2023-11-30
発明の名称
車両隊列交差点意思決定システムおよびその方法
出願人
財団法人車輌研究測試中心
代理人
弁理士法人広江アソシエイツ特許事務所
主分類
G08G
1/16 20060101AFI20250604BHJP(信号)
要約
【課題】車両隊列交差点意思決定方法技術を提供する。
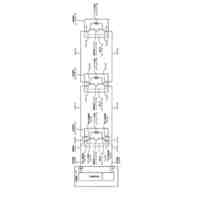
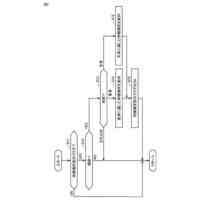
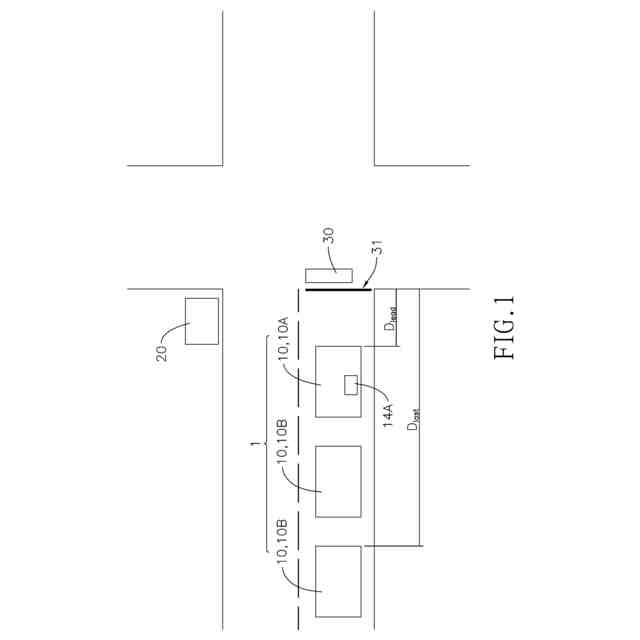
【解決手段】車両隊列交差点意思決定システムは、複数の車両を含む。交差点意思決定プロセスを実行すると、キャプテン車両は現在の速度指令で隊列が交差点を通過できるかどうかを判定し、「はい」の場合には、キャプテン車両は、各車両に現在の速度指令での走行を維持して交差点を通過するように指示し、「いいえ」の場合には、キャプテン車両は、第1の速度意思決定プロセスを通じて第1の最適化された速度制御情報を生成し、隊列が交差点を通過するように隊列を交差点に到達する前に減速させ、加速臨界時点で加速を開始させる。隊列が現在の速度指令で交差点を通過する場合、加速または減速のためのエネルギーは無駄にならない。隊列は最初に減速し、次いで交差点を通る適切な時間に加速を開始し、交差点で信号待ちに費やされる時間を回避または短縮する。
【選択図】図1
特許請求の範囲
【請求項1】
車両隊列交差点意思決定システムであって、
順に配置された複数の車両を備える車両隊列であって、前記複数の車両が、現在の速度指令に基づいて走行するキャプテン車両および複数のメンバー車両を含む車両隊列を備え、
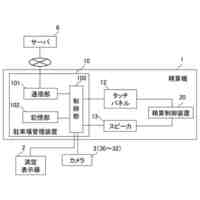
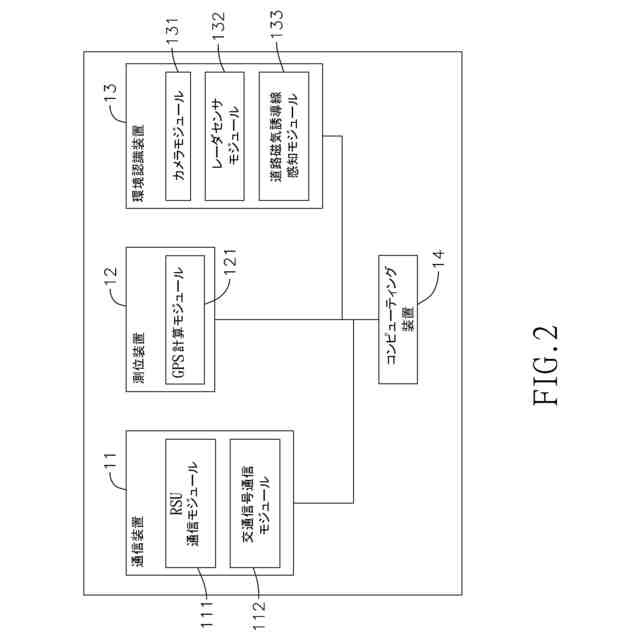
通信装置であって、前記車両の通信装置は、互いに通信可能に接続されている、通信装置と、
絶対位置情報および相対位置情報を生成する測位装置と、
環境状況情報を生成する環境認識装置と、
前記他の車両と通信するために前記通信装置に接続され、前記絶対位置情報および前記相対位置情報を受信するために前記測位装置に接続され、前記環境状況情報を受信するために前記環境認識装置に接続されたコンピューティング装置であって、前記キャプテン車両のコンピューティング装置はキャプテンコンピューティング装置として定義され、前記キャプテンコンピューティング装置は交差点意思決定プロセスを実行し、前記車両隊列が前記環境状況情報における交差点信号情報および交差点距離情報、各車両の前記相対位置情報、前記キャプテン車両の前記絶対位置情報、および前記現在の速度指令に基づいて、前記車両隊列が前記現在の速度指令で交差点を通過可能か否かを判定し、
「はい」の場合、前記キャプテンコンピューティング装置は、前記車両隊列が前記交差点を通過できるように、前記現在の速度指令で走行を維持するように前記車両を制御し、
「いいえ」の場合、前記キャプテンコンピューティング装置は、第1の速度決定処理を介して第1の最適化された速度制御情報を生成し、前記通信装置を介して前記他の車両に前記第1の最適化された速度制御情報を送信し、前記車両隊列が前記交差点を通過するように、前記交差点に到達する前に加速臨界時点まで減速するように前記車両隊列を制御し、加速を開始する、コンピューティング装置と
を各車両がそれぞれ備える車両隊列交差点意思決定システム。
続きを表示(約 3,600 文字)
【請求項2】
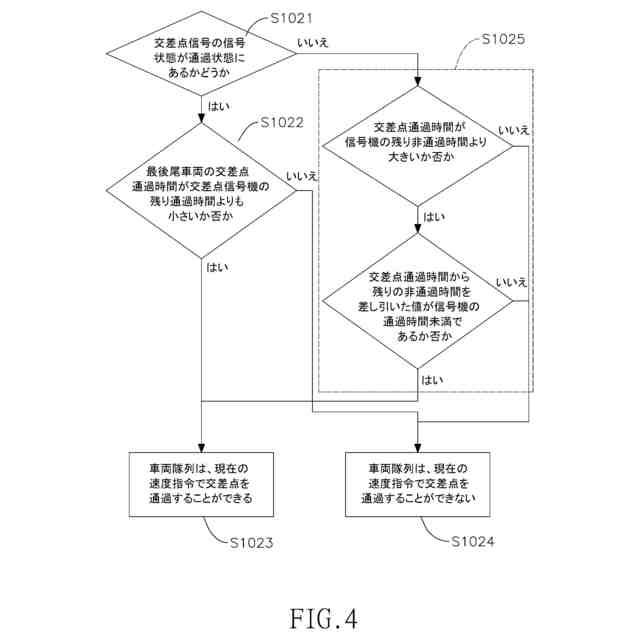
前記現在の速度指令で前記車両隊列が前記交差点を通過可能であるか否かを前記キャプテンコンピューティング装置が判定する場合、前記キャプテンコンピューティング装置が、前記交差点信号情報に基づいて交差点信号の信号状態が通過状態であるか否かをまず判定し、
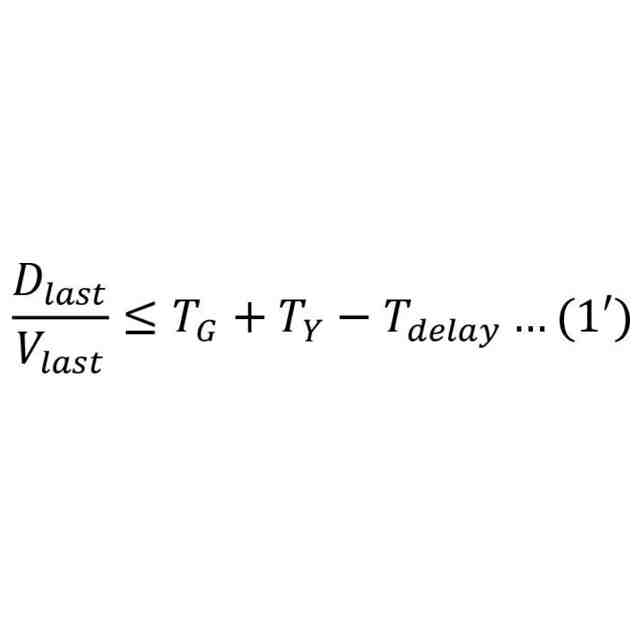
前記交差点信号の信号状態が前記通過状態である場合、前記キャプテンコンピューティング装置が、前記交差点距離情報、前記現在の速度指令、前記車両の相対位置情報に基づいて、前記車両のうちの最後尾車両の交差点通過時間を計算し、前記最後尾車両の交差点通過時間が前記交差点信号の残り通過時間よりも小さいか否かを判定し、
前記最後尾車両の交差点通過時間が前記残り通過時間よりも小さい場合、前記車両隊列が前記現在の速度指令で前記交差点を通過することができ、
前記最後尾車両の交差点通過時間が前記残り通過時間以上である場合、前記車両隊列が前記現在の速度指令では前記交差点を通過することができず、
前記交差点信号の信号状態が非通過状態である場合、前記キャプテンコンピューティング装置が、前記交差点距離情報、前記現在の速度指令、前記車両の相対位置情報に基づいて前記車両のうちの前記最後尾車両の交差点通過時間を最初に計算し、前記最後尾車両の交差点通過時間が前記交差点信号の残りの非通過時間よりも大きいかどうかを判定し、前記最後尾車両の交差点通過時間から前記残り非通過時間を引いた時間が、前記交差点信号の通過時間よりも小さいか否かを判定し、
両方が正しい場合、前記車両隊列が前記現在の速度指令で前記交差点を通過することができる、請求項1に記載の車両隊列交差点意思決定システム。
【請求項3】
前記キャプテンコンピューティング装置が前記現在の速度指令では前記車両隊列が前記交差点を通過できないと判定した場合、前記キャプテンコンピューティング装置がさらに、前記交差点距離情報、前記現在の速度指令、前記車両の相対位置情報、および前記交差点信号情報に基づいて前記交差点信号と連携することにより前記車両隊列が前記交差点を通過できるかどうかを判定し、
「はい」の場合、前記キャプテンコンピューティング装置が、前記交差点信号装置との連携通信を実行し、前記車両隊列が前記交差点を通過するように、第2の速度決定処理を介して第2の最適化された速度制御情報を生成し、
「いいえ」の場合、前記キャプテンコンピューティング装置が、第1の最適化された速度制御情報を生成し、前記通信装置を介して前記他の車両に前記第1の最適化された速度制御情報を送信し、前記交差点に到達する前に減速して走行するように前記車両隊列を制御する、請求項1に記載の車両隊列交差点意思決定システム。
【請求項4】
前記キャプテンコンピューティング装置が、前記交差点信号と連携して前記車両隊列が前記交差点を通過可能か否かを判定する場合、前記キャプテンコンピューティング装置が、前記交差点距離情報、前記現在の速度指令、前記車両の相対位置情報に基づいて最後尾車両の通過時間を計算し、前記最後尾車両の通過時間が、前記交差点信号の残り通過時間と予め設定された延長時間との和よりも小さいか否かを判定し、
「はい」の場合、前記車両隊列は前記交差点信号と連携することによって前記交差点を通過することができ、前記キャプテンコンピューティング装置が前記交差点信号装置との間で連携通信を行う際に、前記キャプテンコンピューティング装置が前記残り通過時間を前記予め設定された延長時間だけ延長する要求を前記交差点信号に送信し、
「いいえ」の場合、前記車両隊列は前記交差点信号と連携することによって前記交差点を通過することができない、請求項3に記載の車両隊列交差点意思決定システム。
【請求項5】
前記キャプテンコンピューティング装置が前記交差点意思決定プロセスを実行すると、前記車両のコンピューティング装置は、外部車両による割り込み状況が発生したかどうかを判定し、
「いいえ」の場合、前記キャプテンコンピューティング装置が、前記車両隊列が前記現在の速度指令で前記交差点を通過することができるかどうか判定する、請求項1に記載の車両隊列交差点意思決定システム。
【請求項6】
前記キャプテンコンピューティング装置が前記交差点意思決定プロセスを実行すると、前記車両のコンピューティング装置が、外部車両による割り込み状況が発生したかどうかを判定し、
「はい」の場合、前記車両隊列内の追い越された車両が一般追従モードを実行し、割り込み状況が解消されるか否かを継続的に判定し、
前記割り込み状況が解消されると、前記追い越された車両のコンピューティング装置が、前記現在の速度指令で前記車両の先行車両に追いつくことができるか否かを判定し、
前記追い越された車両が前記現在の速度指令で前記先行車両に追いつくことができる場合には、前記追い越された車両のコンピューティング装置が、前記通信装置を介して前記キャプテンコンピューティング装置に隊列形成要求を送信して隊列形成処理を実行し、
前記追い越された車両が前記現在の速度指令で前記先行車両に追いつくことができない場合には、前記追い越された車両のコンピューティング装置が、前記通信装置を介して前記キャプテンコンピューティング装置に減速要求を送信して減速走行を要求し、前記隊列形成処理を実行する、請求項1に記載の車両隊列交差点意思決定システム。
【請求項7】
前記第1の速度決定処理が、
前記現在速度指令が惰性走行速度値まで低下するように、予め設定された減速値に基づいて第1の最適化された速度制御情報を生成することと、
最高加速度値、前記現在の速度指令および前記交差点距離情報に基づいて前記交差点への到達時間を継続的に計算し、前記到達時間に基づいて、前記車両隊列の先頭車両が前記交差点に到達したときに前記交差点信号が通過状態であるか否かを判定することと、
「はい」の場合、前記現在の時点を加速臨界時点であると決定し、前記交差点信号が非通過状態から通過状態に変化したときに前記車両隊列が前記交差点を通過するように、前記現在速度指令が最高加速度値だけ増加するように前記第1の最適化された速度制御情報を調整することと、
「いいえ」の場合、前記惰性走行速度値に基づいて前記第1の最適化された速度制御情報を維持することとを含む、請求項1から6のいずれか一項に記載の車両隊列交差点意思決定システム。
【請求項8】
前記第2の速度決定処理が、
前記現在の速度指令が上限速度値まで徐々に上昇するように、前記上限速度値および上限加速度値に基づいた第2の最適化された速度制御情報を生成することを含む、請求項3または4に記載の車両隊列交差点意思決定システム。
【請求項9】
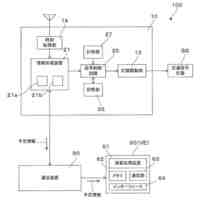
前記通信装置が、路側機通信モジュールを含み、
前記環境認識装置が、カメラモジュール、レーダ検知モジュール、またはそれらの組み合わせのうちの少なくとも1つを含み、
前記測位装置が、前記路側機通信モジュールから受信した道路位置情報に基づいて前記絶対位置情報を生成し、前記環境認識装置から受信した前記情報に基づいて前記相対位置情報を生成する、請求項1に記載の車両隊列交差点意思決定システム。
【請求項10】
車両隊列内のキャプテン車両のコンピューティング装置を用いて実施される車両隊列交差点意思決定方法であって、
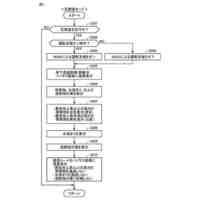
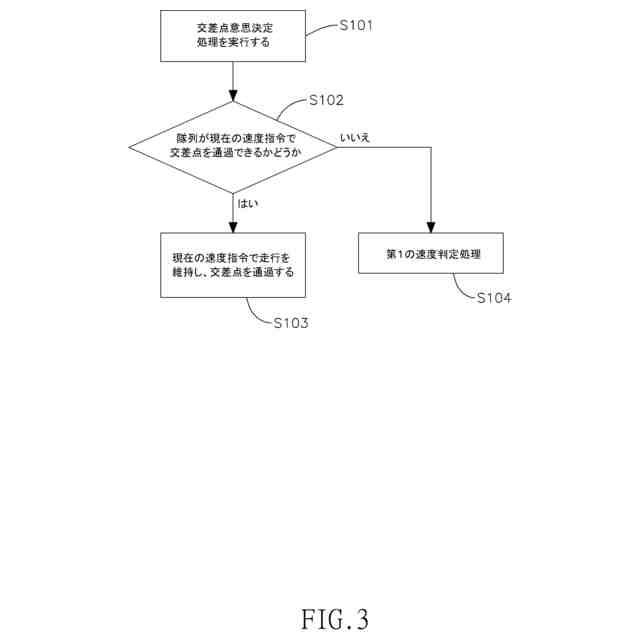
交差点意思決定プロセスを実行するステップと、
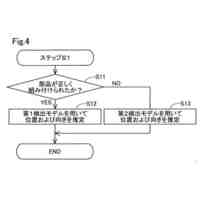
環境認識情報における交差点信号情報および交差点距離情報、各車両の相対位置情報、前記キャプテン車両の絶対位置情報、および現在の速度指令に基づいて、前記車両隊列が前記現在の速度指令で交差点を通過できるか否かを判定するステップと、
「はい」の場合、前記車両隊列が前記交差点を通過するように、前記現在の速度指令による走行を維持するように前記車両を制御するステップと、
「いいえ」の場合、第1の速度決定プロセスを介して第1の最適化された速度制御情報を生成し、前記第1の最適化された速度制御情報を前記他の車両に送信し、前記車両隊列が前記交差点を通過するように、前記交差点に到達する前に加速臨界時点まで減速して走行するように前記車両隊列を制御し、加速して走行を開始するステップと
を備える車両隊列交差点意思決定方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
1.発明の分野
本発明は、交差点意思決定システムおよび方法に関し、より詳細には、車両隊列交差点意思決定システムおよび方法に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
2.関連技術の説明
近年、自動運転技術は急速に発展しており、主に3つのコア部分、すなわち、検知、意思決定、および制御に焦点を当てている。センシング部は、レーダ、LIDAR、およびカメラなどの検知装置を用いて、物体認識および道路状況等の周囲環境の情報を収集する。意思決定部は、経路計画および挙動予測を含み、複雑なアルゴリズムを介して様々な運転オプションを評価して、最も安全で最良の経路を決定する。最後に、制御部は、決定を特定の制御命令に変換し、加速、減速、および横方向の調整および方向転換などの挙動を含む車両の自動運転を可能にする。
【0003】
自動運転技術を採用する車両隊列は、列を成して移動する複数の車両からなり、自律的に動作する単一の車両と比較して、より効率的な走行を提供する。これは、近年最も需要の多い市場の1つとなっている。上述の検知、意思決定、および制御の態様を実施することに加えて、車両隊列は、車両間の通信、相対距離検知、ならびに集合的な意思決定および制御などの複雑な統合技術を包含する、車両内の連携技術も含む。
【0004】
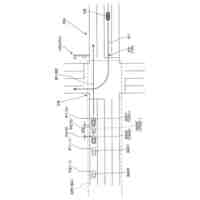
自動運転技術を採用した車両隊列が道路交差点を通過する場合、考慮すべき要因は、単一の車線を走行する単一の車両よりもさらに複雑である。車両隊列の全長が長いだけでなく、隊列は走行中に他の車両によって中断されることもある。交差点の信号機は、それぞれ異なる残り時間を有する通行可能または通行不可能な状態にある可能性がある。車両隊列が速度を上げて不適切な時間に交差点を横断すると、交通障害を引き起こす可能性がある。逆に、横断するのに十分な時間があるにもかかわらず減速して停止すると、車両隊列の走行効率を低下させたり、交通渋滞を引き起こしたりする可能性がある。
【0005】
特許文献1は、自動運転機能を有する車両に関する。自動運転車は、少なくとも2つの異なる運転モードに適している。これらの運転モードは、第1のタイプの自動運転のために構成された第1の運転モードを含み、自動運転車が先行車両に追従して誘導されることを可能にするように構成された第2の運転モードとを含む。特許文献1は、自動運転車および先行車両が道路交差点を通過する状況については言及していない。
【0006】
結論として、交差点を安全で、効率的に通過するように車両隊列を制御する方法は、対処する必要がある緊急の問題の1つである。
【先行技術文献】
【特許文献】
【0007】
中国特許第108698600B号
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明の目的は、車両隊列交差点意思決定方法技術を提供することである。
【課題を解決するための手段】
【0009】
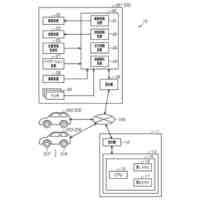
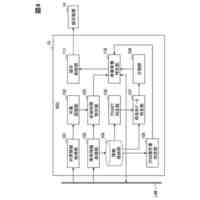
前述の目的を達成するために、車両隊列交差点意思決定システムは、順に配置された複数の車両を備える車両隊列であって、複数の車両は、現在の速度指令に基づいて走行するキャプテン車両および複数のメンバー車両を含む車両隊列を備え、
車両の通信装置が、互いに通信可能に接続されている通信装置と、
絶対位置情報および相対位置情報を生成する測位装置と、
環境状況情報を生成する環境認識装置と、
他の車両と通信するために通信装置に接続され、絶対位置情報および相対位置情報を受信するために測位装置に接続され、環境状況情報を受信するために環境認識装置に接続されたコンピューティング装置で、キャプテン車両のコンピューティング装置が(以下、キャプテンコンピューティング装置という)、交差点意思決定プロセスを実行し、環境認識情報における交差点信号情報および交差点距離情報、各車両の相対位置情報、キャプテン車両の絶対位置情報、および現在の速度指令に基づいて、車両隊列が現在の速度指令で交差点を通過可能か否かを判定し、
「はい」の場合、キャプテン車両のコンピューティング装置が、車両隊列が交差点を通過できるように、現在の速度指令で走行を維持するように車両を制御し、
「いいえ」の場合、キャプテン車両のコンピューティング装置が、第1の速度決定処理を介して第1の最適化された速度制御情報を生成し、通信装置を介して他の車両に第1の最適化された速度制御情報を送信し、車両隊列が交差点を通過するように、交差点に到達する前に加速臨界時点まで減速するように車両隊列を制御し、加速を開始するコンピューティング装置と
を各車両がそれぞれ備える。
【0010】
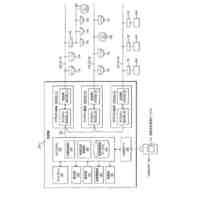
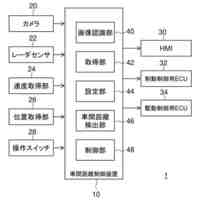
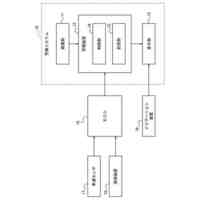
車両隊列では、全ての車両に通信装置、測位装置、環境監視装置およびコンピューティング装置が装備されている。各車両で生成された絶対位置情報、相対位置情報、環境状態情報は、通信装置を介して少なくともキャプテン車両に同期させることができる。キャプテン車両は、各車両からの情報に基づいて車両隊列の全体的な状況を判断し、他の車両、すなわちメンバー車両に送信される制御信号を生成して、それに応じてすべての車両の進行制御を調整することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
ニッタン株式会社
発信機
1か月前
ニッタン株式会社
発信機
1か月前
アズビル株式会社
建物管理システム
13日前
ホーチキ株式会社
異常報知設備
1か月前
ホーチキ株式会社
異常報知設備
25日前
株式会社JVCケンウッド
情報処理装置
5日前
ホーチキ株式会社
非常通報システム
28日前
株式会社フィットネスワン
見守りシステム
1か月前
Adora株式会社
アプリ使用制御システム
24日前
ユニティガードシステム株式会社
警備監視システム
10日前
シャープ株式会社
駐車場管理装置
21日前
株式会社アドヴィックス
走行支援システム
26日前
トヨタ自動車株式会社
運転支援装置
1か月前
株式会社エイビット
工事観測システム
11日前
トヨタ自動車株式会社
車両
20日前
株式会社アイシン
重畳画像表示装置
1か月前
株式会社アイシン
重畳画像表示装置
1か月前
トヨタ自動車株式会社
情報機器
13日前
トヨタ自動車株式会社
車間距離制御装置
10日前
日本信号株式会社
情報提供システム及び情報提供方法
18日前
能美防災株式会社
煙感知器
11日前
能美防災株式会社
加煙試験器
28日前
株式会社デンソー
車両用注意喚起制御装置
26日前
能美防災株式会社
視野確認器
17日前
株式会社京三製作所
交通信号制御機保守システム
6日前
株式会社アイシン
地図情報生成システム
18日前
トヨタ自動車株式会社
警報システム
1か月前
株式会社アイシン
地図情報生成システム
18日前
トヨタ自動車株式会社
情報処理装置
1か月前
日本信号株式会社
交通信号制御装置及び交通信号制御方法
11日前
トヨタ自動車株式会社
情報処理装置
1か月前
トヨタ自動車株式会社
情報処理装置
1か月前
トヨタ自動車株式会社
制御装置
21日前
トヨタ自動車株式会社
運転支援システム
6日前
ニッタン株式会社
感知器用中継器
1か月前
株式会社マイキー
発着時刻表示システム
7日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ