TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025089866
公報種別
公開特許公報(A)
公開日
2025-06-16
出願番号
2023204792
出願日
2023-12-04
発明の名称
車両運転支援装置、車両運転支援方法及びそのプログラム
出願人
トヨタ自動車株式会社
,
株式会社デンソー
代理人
弁理士法人プロスペック特許事務所
主分類
G08G
1/16 20060101AFI20250609BHJP(信号)
要約
【課題】不要な自動ブレーキが行われる頻度を低減する。
【解決手段】車両運転支援装置は、自車両の周辺の物標の位置を表す検出点を繰り返し取得する物標検出部と、過去の時点において物標検出部により取得された検出点及び現時点において物標検出部により検出されている検出点に基いて前記物標の位置を最終的に特定する物標位置認識点を含む周辺物標情報を繰り返し更新する物標認識部と、前記自車両が前記物標と衝突する可能性が高い場合に成立する所定の自動ブレーキ条件が成立したと前記周辺物標情報に基いて判定した場合、前記衝突を回避するための自動ブレーキを作動させる車両制御部と、を備える。前記車両制御部は、物標検出部が、自動ブレーキ条件を成立させた前記物標の位置を表す前記検出点を現時点において取得していない場合、前記自動ブレーキを行わない。
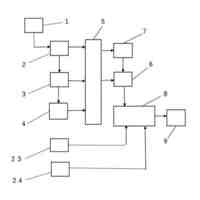
【選択図】図1
特許請求の範囲
【請求項1】
自車両の周辺の物標の位置を表す検出点を繰り返し取得する物標検出部と、
過去の時点において前記物標検出部により取得された前記検出点及び現時点において前記物標検出部により検出されている前記検出点に基いて前記物標の位置を最終的に特定する物標位置認識点を含む周辺物標情報を繰り返し更新する物標認識部と、
前記自車両が前記物標と衝突する可能性が高い場合に成立する所定の自動ブレーキ条件が成立したと前記周辺物標情報に基いて判定した場合、前記衝突を回避するための自動ブレーキを作動させる車両制御部と、
を備える車両運転支援装置において、
前記車両制御部は、
前記物標検出部が、前記自動ブレーキ条件を成立させた前記物標の位置を表す前記検出点を現時点において取得していない場合、前記自動ブレーキを行わないように構成された、
車両運転支援装置。
続きを表示(約 1,400 文字)
【請求項2】
請求項1に記載の車両運転支援装置において、
前記車両制御部は、
前記自車両が前記物標と衝突する可能性が高い場合に成立する条件であって前記自動ブレーキ条件とは異なる所定の警報条件が成立したと前記周辺物標情報に基いて判定した場合、前記物標検出部が、前記警報条件を成立させた前記物標の位置を表す前記検出点を現時点において取得しているか否かに関わらず、前記自車両の運転者に対して警報を行うように構成された、
車両運転支援装置。
【請求項3】
請求項1又は請求項2に記載の車両運転支援装置において、
前記物標検出部は、
超音波を用いて前記自車両の周辺に位置する物標と前記自車両との距離を計測するソナーからのソナー情報、及び、前記自車両の周辺を撮影することにより画像データを取得するカメラからのカメラ情報、のうちの少なくとも一方に基いて前記検出点を取得するように構成され、
前記車両制御物標は、
前記自車両の予想進行領域内に前記物標位置認識点のうちの一つ以上が位置しているとの条件が少なくとも成立している場合に前記自動ブレーキ条件が成立すると判定するように構成された、
車両運転支援装置。
【請求項4】
自車両の周辺の物標の位置を表す検出点を繰り返し取得する第1ステップと、
過去の時点において前記物標検出部により取得された前記検出点及び現時点において前記物標検出部により検出されている前記検出点に基いて前記物標の位置を最終的に特定する物標位置認識点を含む周辺物標情報を繰り返し更新する第2ステップと、
前記自車両が前記物標と衝突する可能性が高い場合に成立する所定の自動ブレーキ条件が成立したと前記周辺物標情報に基いて判定した場合、
前記物標検出部が、前記自動ブレーキ条件を成立させた前記物標の位置を表す前記検出点を現時点において取得しているとき、前記衝突を回避するための自動ブレーキを作動させ、
前記物標検出部が、前記自動ブレーキ条件を成立させた前記物標の位置を表す前記検出点を現時点において取得していないとき、前記衝突を回避するための自動ブレーキを作動させない、
第3ステップと、
を含む車両運転支援方法。
【請求項5】
自車両に搭載されたコンピュータに実行させるプログラムであって、
前記プログラムは前記コンピュータに、
自車両の周辺の物標の位置を表す検出点を繰り返し取得する第1ステップと、
過去の時点において前記物標検出部により取得された前記検出点及び現時点において前記物標検出部により検出されている前記検出点に基いて前記物標の位置を最終的に特定する物標位置認識点を含む周辺物標情報を繰り返し更新する第2ステップと、
前記自車両が前記物標と衝突する可能性が高い場合に成立する所定の自動ブレーキ条件が成立したと前記周辺物標情報に基いて判定した場合、
前記物標検出部が、前記自動ブレーキ条件を成立させた前記物標の位置を表す前記検出点を現時点において取得しているとき、前記衝突を回避するための自動ブレーキを作動させ、
前記物標検出部が、前記自動ブレーキ条件を成立させた前記物標の位置を表す前記検出点を現時点において取得していないとき、前記衝突を回避するための自動ブレーキを作動させない、
第3ステップと、
を実行させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自車両と物標との衝突を回避するための自動ブレーキを行う、車両運転支援装置、車両運転支援方法及びそのプログラムに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
従来の装置は、自車両の舵角に基いて走行経路を算出し、自車両がその走行経路を走行した場合にカメラ及びソナー等の外界センサが検出した障害物に衝突するか否かを判定する判定部と、その判定結果に基いて報知を行う報知部と、を備える(例えば、特許文献1を参照。)。更に、従来の別の装置は、自車両が障害物に衝突する可能性があると判定した場合に自動ブレーキを実行することにより自車両を停止させるようになっている。
【先行技術文献】
【特許文献】
【0003】
特許第6975856号公報
【発明の概要】
【0004】
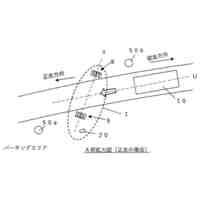
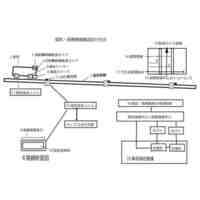
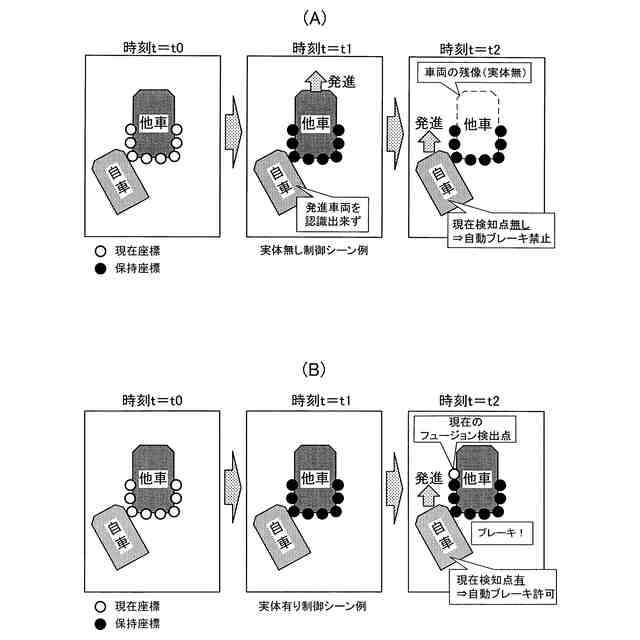
しかしながら、従来の装置は以下に述べるような問題を有する。例えば、図6の(A)に示したように、時刻t0にて自車両(自車)の近傍に他車両(他車)が停止している場合、時刻t0にて自車両の外界センサが他車両を障害物として検出する。図6中の白丸は現時点にて外界センサが検出した障害物の位置を表す点を示す。時刻t1にて自車両が停止すると外界センサが障害物の位置を表す点を新たに検出しなくなることがあるので、時刻t0にて検出された障害物の位置を表す点が保持される。図6中の黒丸は保持された障害物の位置を表す点を示す。このため、時刻t2までに他車両が移動していても、自車両は保持された障害物の位置を表す点に依然として障害物が存在していると誤認識する場合がある。このとき、自車両の運転者が自車両を発進させようとすると、誤認識している障害物との衝突を避けるための自動ブレーキが作動される。この結果、実際には障害物(他車両)が存在しないにも関わらず、自車両が発進できないという場合が発生する。
【0005】
これに対し、図6の(B)に示したように、保持された点(黒丸)に障害物が存在すると認識するのではなく、現時点にて外界センサが検出している点(白丸)に障害物が存在すると認識するように装置は構成され得る。この装置によれば、上述した図6の(A)のように自車両が自動ブレーキによって発進できなくなる事態が発生することを回避することができる。しかしながら、この場合、他車両が停止しし続けている場合に外界センサの検出領域Daとの他車両との位置関係によっては他車両の一部の点Pが現時点にて認識できない状態が発生する。よって、自動ブレーキが作動しなければ自車両が他車両と点Pにて接触する可能性がある。
【0006】
本発明は、係る課題を解決するためになされた。即ち、本発明の目的の一つは、不要な自動ブレーキが行われる頻度を低減することができる車両運転支援装置、車両運転支援方法及びそのプログラムを提供することにある。
【0007】
本発明の車両運転支援装置の一態様は、
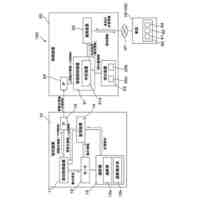
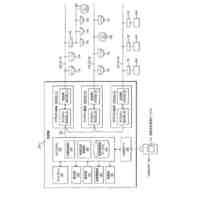
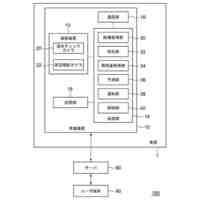
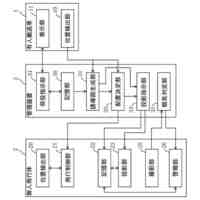
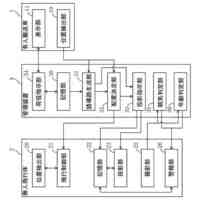
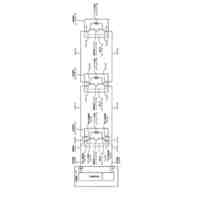
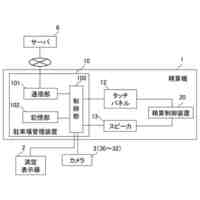
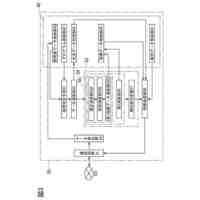
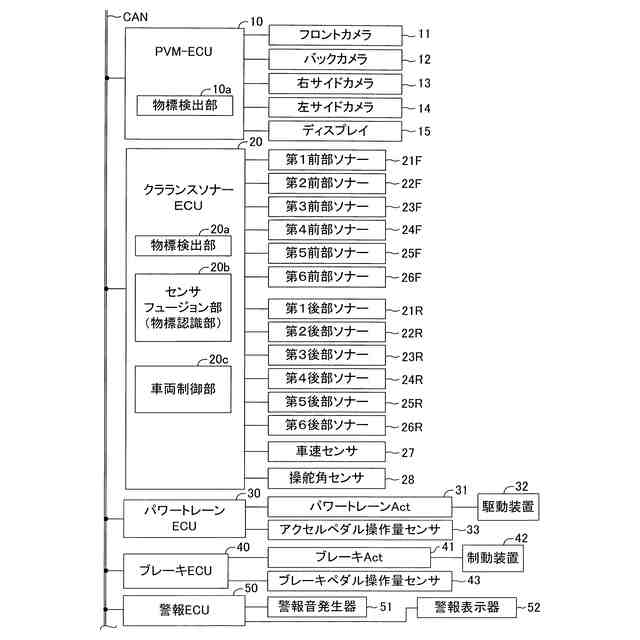
自車両の周辺の物標の位置を表す検出点を繰り返し取得する物標検出部(10a、11-14、20a、21F―26F、21R-26R)と、
過去の時点において前記物標検出部により取得された前記検出点及び現時点において前記物標検出部により検出されている前記検出点に基いて前記物標の位置を最終的に特定する物標位置認識点を含む周辺物標情報を繰り返し更新する物標認識部(20b)と、
前記自車両が前記物標と衝突する可能性が高い場合に成立する所定の自動ブレーキ条件が成立したと前記周辺物標情報に基いて判定した場合、前記衝突を回避するための自動ブレーキを作動させる車両制御部(20c)と、
を備える。
【0008】
更に、前記車両制御部は、
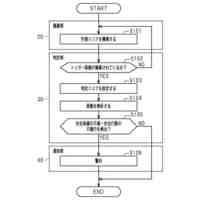
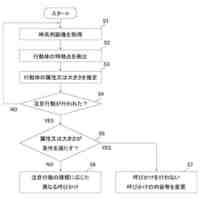
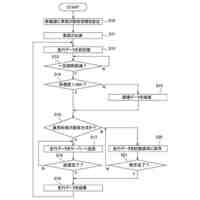
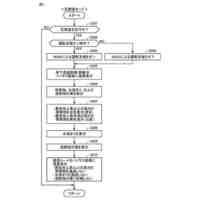
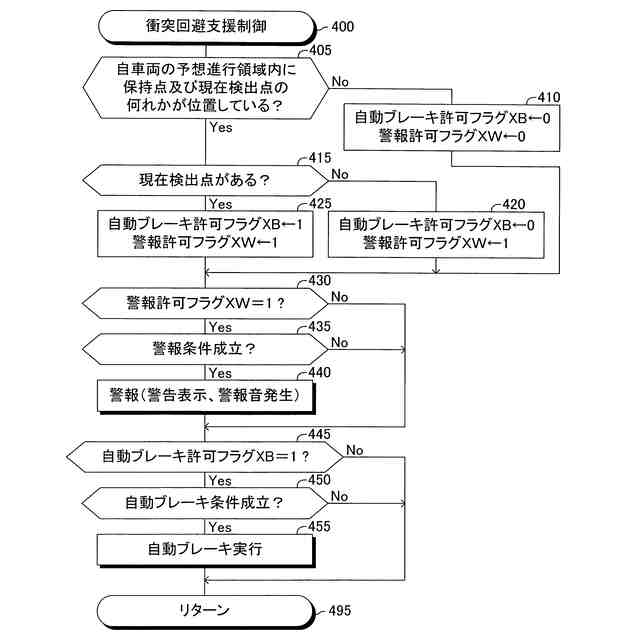
前記物標検出部が、前記自動ブレーキ条件を成立させた前記物標(即ち、自動ブレーキ条件を成立させた対象である物標)の位置を表す前記検出点を現時点において取得していない場合、前記自動ブレーキを行わないように構成されている(図4のステップ415での「No」との判定、ステップ420、及び、ステップ445での「No」との判定を参照。)。
【0009】
この態様によれば、物標検出部により過去の時点で検出された検出点と、物標検出部により現時点で検出されている検出点と、に基いて、その物標の位置を最終的に特定する物標位置認識点が更新される。そして、その物標位置認識点を含む周辺物標情報に基いて、自車両が物標と衝突する可能性が高い場合に成立する所定の自動ブレーキ条件が成立したと判定された場合に、自動ブレーキが作動させられる。しかしながら、物標検出部が、自動ブレーキ条件を成立させるに至った物標(即ち、自車両と衝突する可能性が高いと判定された物標)の位置を表す検出点を現時点で取得していない場合、その物標は既に移動してしまっている可能性が高い。そこで、上記態様は、自動ブレーキ条件が成立したとしても、物標検出部が、自動ブレーキ条件を成立させるに至った物標の位置を表す検出点を現時点で取得していない場合、自動ブレーキを行わない(自動ブレーキが禁止される)ように構成されている。換言すれば、物標検出部が、自動ブレーキ条件を成立させるに至った物標の位置を表す検出点を現時点で取得している場合には、その物標は依然として物標位置認識点に位置している可能性が高いので、自動ブレーキ条件が成立すれば自動ブレーキが実行される。この結果、不要な自動ブレーキが作動される頻度を低下するとともに、自動ブレーキが必要な場合には自動ブレーキを作動させることができる。
【0010】
上記説明においては、本発明の理解を助けるために、後述する実施形態に対応する発明の構成に対し、その実施形態で用いた名称及び/又は符号を括弧書きで添えている。しかしながら、本発明の各構成要素は、前記名称及び/又は符号によって規定される実施形態に限定されるものではない。本発明は、車両運転支援方法及びそのプログラムにも及ぶ。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
安全運転車両
2か月前
個人
自動車ケアフル灯
2か月前
能美防災株式会社
発信機
2か月前
ニッタン株式会社
発信機
1か月前
ニッタン株式会社
発信機
1か月前
個人
逆走・正走車両検出システム
1か月前
日本信号株式会社
情報提供システム
1か月前
アズビル株式会社
建物管理システム
14日前
ホーチキ株式会社
異常報知設備
1か月前
ホーチキ株式会社
異常報知設備
26日前
タック株式会社
安全監視システム
2か月前
株式会社JVCケンウッド
通知システム
2か月前
株式会社JVCケンウッド
情報処理装置
6日前
個人
磁気・光学誘導路線による車両の運行制御
1か月前
株式会社フィットネスワン
見守りシステム
1か月前
三菱ロジスネクスト株式会社
搬送システム
2か月前
三菱ロジスネクスト株式会社
搬送システム
2か月前
三菱ロジスネクスト株式会社
搬送システム
2か月前
三菱ロジスネクスト株式会社
搬送システム
2か月前
株式会社アジラ
注目行動呼びかけシステム
2か月前
ホーチキ株式会社
非常通報システム
29日前
トヨタ自動車株式会社
配車システム
1か月前
ユニティガードシステム株式会社
警備監視システム
11日前
Adora株式会社
アプリ使用制御システム
25日前
トヨタ自動車株式会社
障害物検知装置
今日
東亜電子工業株式会社
警報コントローラ
2か月前
トヨタ自動車株式会社
車両
2か月前
シャープ株式会社
駐車場管理装置
22日前
能美防災株式会社
非常報知システム
1か月前
トヨタ自動車株式会社
運転支援装置
1か月前
矢崎総業株式会社
路面監視装置
2か月前
株式会社エイビット
工事観測システム
12日前
愛知時計電機株式会社
生活データ集計装置
2か月前
トヨタ自動車株式会社
車両
21日前
株式会社アドヴィックス
走行支援システム
27日前
パナソニックIPマネジメント株式会社
火災警報器
2か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ