TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025084926
公報種別
公開特許公報(A)
公開日
2025-06-03
出願番号
2025032694,2024025977
出願日
2025-03-03,2019-03-13
発明の名称
動画像符号化方法、動画像復号方法、及びビットストリームの生成方法
出願人
エスゼット ディージェイアイ テクノロジー カンパニー リミテッド
,
SZ DJI TECHNOLOGY CO.,LTD
代理人
弁理士法人RYUKA国際特許事務所
主分類
H04N
19/513 20140101AFI20250527BHJP(電気通信技術)
要約
【課題】高度/選択可能な時間動きベクトル予測(ATMVP)技術の性能上の利得を維持したまま、ATMVP技術の複雑さを低減する動画像処理方法及び装置を提供する。
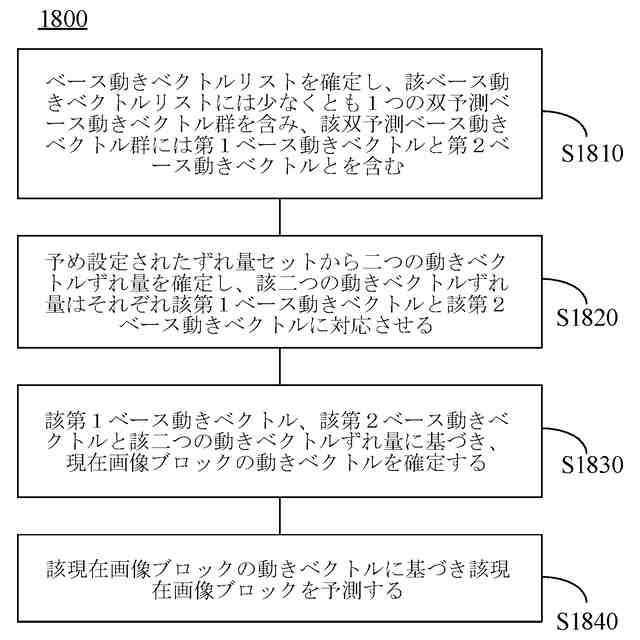
【解決手段】動画像符号化方法は、ベース動きベクトルリストを確定する。ベース動きベクトルリストは、双予測ベース動きベクトル群を含み、双予測ベース動きベクトル群は、第1ベース動きベクトルと第2ベース動きベクトルとを含む。方法はまた、予め設定されたずれ量セットに従って、2つの動きベクトルずれ量を確定する。2つの動きベクトルずれ量は、第1ベース動きベクトル及び第2ベース動きベクトルのそれぞれに対応する。方法はさらに、第1ベース動きベクトル、第2ベース動きベクトル及び2つの動きベクトルずれ量に従って、現在画像ブロックの動きベクトルを確定し、現在画像ブロックの動きベクトルに従って、現在画像ブロックに対して符号化を実行する。
【選択図】図18
特許請求の範囲
【請求項1】
ベース動きベクトルリストを確定するステップであって、前記ベース動きベクトルリストは、双予測ベース動きベクトル群を含み、前記双予測ベース動きベクトル群は、第1ベース動きベクトルと第2ベース動きベクトルとを含む、ステップと、
予め設定されたずれ量セットに従って、2つの動きベクトルずれ量を確定するステップであって、前記2つの動きベクトルずれ量は、前記第1ベース動きベクトル及び前記第2ベース動きベクトルのそれぞれに対応する、ステップと、
前記第1ベース動きベクトル、前記第2ベース動きベクトル、及び前記2つの動きベクトルずれ量に従って、現在画像ブロックの動きベクトルを確定するステップと、
前記現在画像ブロックの前記動きベクトルに従って、前記現在画像ブロックに対して符号化を実行するステップと
を備える動画像符号化方法。
続きを表示(約 1,800 文字)
【請求項2】
前記第1ベース動きベクトル及び前記第2ベース動きベクトルの両方が非特定参照画像を示すことに対応して、前記2つの動きベクトルずれ量が、前記2つの動きベクトルずれ量に従って前記第1ベース動きベクトル及び前記第2ベース動きベクトルを調整するために使用される、請求項1に記載の動画像符号化方法。
【請求項3】
マージ候補リストを取得するステップであって、前記マージ候補リストは、P組のマージ動きベクトル候補を含み、Pは、1以上の整数である、ステップをさらに備え、
前記ベース動きベクトルリストを確定するステップは、前記マージ候補リストに従って前記ベース動きベクトルリストを確定するステップを含む、請求項1に記載の動画像符号化方法。
【請求項4】
前記マージ候補リストに従って前記ベース動きベクトルリストを確定するステップは、Pが2以上であることに対応して、前記マージ候補リスト内の2組のマージ動きベクトル候補を取得して前記ベース動きベクトルリストを形成するステップを含む、
請求項3に記載の動画像符号化方法。
【請求項5】
前記予め設定されたずれ量セットは、{2,4,8,16,32,64,128}を含む、請求項1に記載の動画像符号化方法。
【請求項6】
ベース動きベクトルリストを確定するステップであって、前記ベース動きベクトルリストは、双予測ベース動きベクトル群を含み、前記双予測ベース動きベクトル群は、第1ベース動きベクトルと第2ベース動きベクトルとを含む、ステップと、
予め設定されたずれ量セットに従って、2つの動きベクトルずれ量を確定するステップであって、前記2つの動きベクトルずれ量は、前記第1ベース動きベクトル及び前記第2ベース動きベクトルのそれぞれに対応する、ステップと、
前記第1ベース動きベクトル、前記第2ベース動きベクトル、及び前記2つの動きベクトルずれ量に従って、現在画像ブロックの動きベクトルを確定するステップと、
前記現在画像ブロックの前記動きベクトルに従って、前記現在画像ブロックに対して復号を実行するステップと
を備える動画像復号方法。
【請求項7】
前記第1ベース動きベクトル及び前記第2ベース動きベクトルの両方が非特定参照画像を示すことに対応して、前記2つの動きベクトルずれ量が、前記2つの動きベクトルずれ量に従って前記第1ベース動きベクトル及び前記第2ベース動きベクトルを調整するために使用される、請求項6に記載の動画像復号方法。
【請求項8】
マージ候補リストを取得するステップであって、前記マージ候補リストは、P組のマージ動きベクトル候補を含み、Pは、1以上の整数である、ステップをさらに備え、
前記ベース動きベクトルリストを確定するステップは、前記マージ候補リストに従って前記ベース動きベクトルリストを確定するステップを含む、請求項6に記載の動画像復号方法。
【請求項9】
前記マージ候補リストに従って前記ベース動きベクトルリストを確定するステップは、Pが2以上であることに対応して、前記マージ候補リスト内の2組のマージ動きベクトル候補を取得して前記ベース動きベクトルリストを形成するステップを含む、請求項8に記載の動画像復号方法。
【請求項10】
ベース動きベクトルリストを確定するステップであって、前記ベース動きベクトルリストは、双予測ベース動きベクトル群を含み、前記双予測ベース動きベクトル群は、第1ベース動きベクトルと第2ベース動きベクトルとを含む、ステップと、
予め設定されたずれ量セットに従って、2つの動きベクトルずれ量を確定するステップであって、前記2つの動きベクトルずれ量は、前記第1ベース動きベクトル及び前記第2ベース動きベクトルのそれぞれに対応する、ステップと、
前記第1ベース動きベクトル、前記第2ベース動きベクトル、及び前記2つの動きベクトルずれ量に従って、現在画像ブロックの動きベクトルを確定するステップと、
前記現在画像ブロックの前記動きベクトルに従って、前記現在画像ブロックを符号化してビットストリームを取得するステップと
を備えるビットストリームの生成方法。
発明の詳細な説明
【技術分野】
【0001】
本出願は、出願番号がPCT/CN2018/081652、PCT/CN2018/095710、PCT/CN2018/103693、PCT/CN2018/107436とPCT/CN2018/112805であるPCT出願の優先権を主張し、その内容の全ては参照によって本出願に組み込まれている。
続きを表示(約 2,700 文字)
【0002】
著作権表示
本特許文献に開示されている内容には著作権保護の対象となる材料が含まれている。該著作権は著作権所有者が所有する。著作権所有者は、これらの特許書類または特許開示の何人による複製に対しても、特許庁の公式レ符号化またはファイルに表示される通りであれば異議を唱えない。
【0003】
本出願は、動画像の符号化および復号の分野に関連し、具体的には、動画像処理方法および装置に関する。
【背景技術】
【0004】
現在、主要な動画像符号化に関する標準規格では、フレーム間予測部分においていずれもブロックに基づく動き補償技術を採用し、その主な原理は、現在画像ブロックのためにすでに符号化された画像の中で最も類似したブロックを探索することであり、このプロセスは動き補償と呼ばれる。例えば、1フレームの画像に対し、まず、サイズが同じな符号化領域(Coding Tree Unit、CTU)に分割し、例えば、サイズが64×64または128×128である。各CTUは、さらに、方形または矩形の符号化ユニット(Coding Unit、CU)に分割することができる。各CUは、参照フレーム(通常は現在のフレームの時間領域の近くにおける再構築されたフレーム)の中で最も類似したブロックを現在のCUの予測ブロックとして探索する。現在のブロック(つまり、現在のCU)と類似ブロック(つまり、現在のCUの予測ブロック)の間の相対変位は、動きベクトル(Motion Vector、MV)と呼ばれる。参照フレームの中で現在のブロックの予測ブロックとして最も類似したブロックを探索するプロセスが動き補償である。
【0005】
従来技術では、通常、2つの方法で現在のCUの動きベクトル候補リストを構築し、動きベクトル候補リストはmerge候補リストとも呼ばれる。動きベクトル候補リストには空間領域の動きベクトル候補が含まれており、それは、通常、現在のCUの符号化された近傍ブロックの動きベクトル(または動き情報)を動きベクトル候補リストに取り込む。動きベクトル候補リストには時間領域の動きベクトル候補がさらに含まれており、時間動きベクトル予測(Temproal Motion Vector Prediction,TMVP)は、現在のCUの近傍の符号化された画像における対応位置のCU(つまり、同位CU)の動きベクトル(または動き情報)を利用する。merge候補リストから、最適な動きベクトル候補を選択して現在のCUの動きベクトルとし、現在のCUの動きベクトルに基づき現在のCUの予測ブロックを確定する。
【0006】
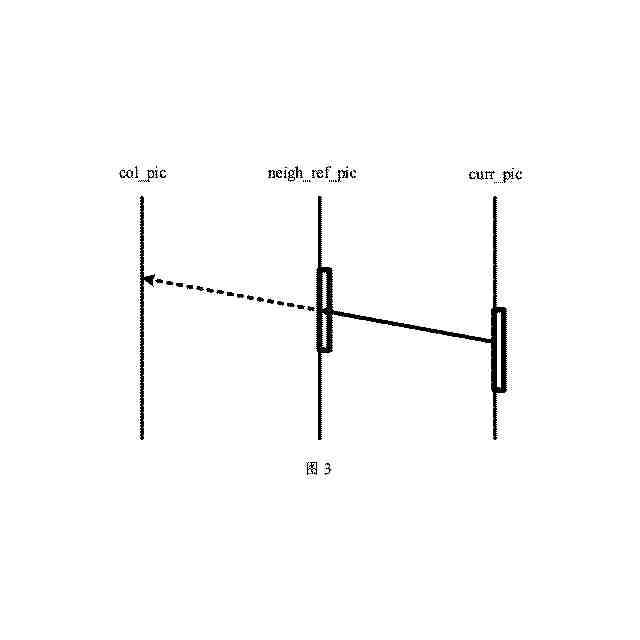
高度/選択可能な時間動きベクトル予測技術(Advanced/Alternative temporal motion vector prediction、ATMVP)は動きベクトル予測メカニズムである。ATMVP技術の基本的な構想は、現在のCU内の複数のサブブロックの動き情報を取得することで動き補償を行うことである。ATMVP技術は候補リスト(例えばmerge候補リストまたはAMVP(Advanced Motion Vector Prediction)候補リスト)の構築において、現在のCU内における複数のサブブロックの動き情報を候補として導入する。ATMVP技術の実現は、ほぼ二つのステップに分けられる。ステップ1は、現在のCUの動きベクトル候補リストまたは現在のCUの隣接する画像ブロックの動きベクトルを走査することにより、1つの時間ベクトルを確定することである。ステップ2は、現在のCUをN×N(Nはデフォルトで4)のサブブロック(sub-CU)に分割し、ステップ1で取得した時間ベクトルに基づき各サブブロックの参照フレーム内での対応するブロックを確定し、各サブブロックの参照フレーム内での対応するブロックの動きベクトルに基づき各サブブロックの動きベクトルを確定することである。
【0007】
現在のATMVP技術のステップ1では、現在のCUの動きベクトル候補リストまたは現在のCUの隣接画像ブロックの動きベクトルを走査することで、時間ベクトルを確定するプロセスには改良の余地がある。現在のATMVP技術のステップ2では、sub-CUのサイズをフレームレベルで適応的に設定しており、デフォルトのサイズは4×4である。ある事前設定条件を満すと、sub-CUのサイズが8×8に設定される。sub-CUのサイズの設定には現在の動き情報記憶粒度(8×8)に合致しないようないくつかの問題がある。ATMVP技術とTMVP技術には、状況によっては冗長操作があり、動きベクトル候補のリストを構築するプロセスには改良の余地がある。
【発明の概要】
【0008】
本出願は、従来のATMVP技術の性能上の利得を維持したまま、ATMVP技術の複雑さを低減することができる動画像処理方法および装置を提供する。
【0009】
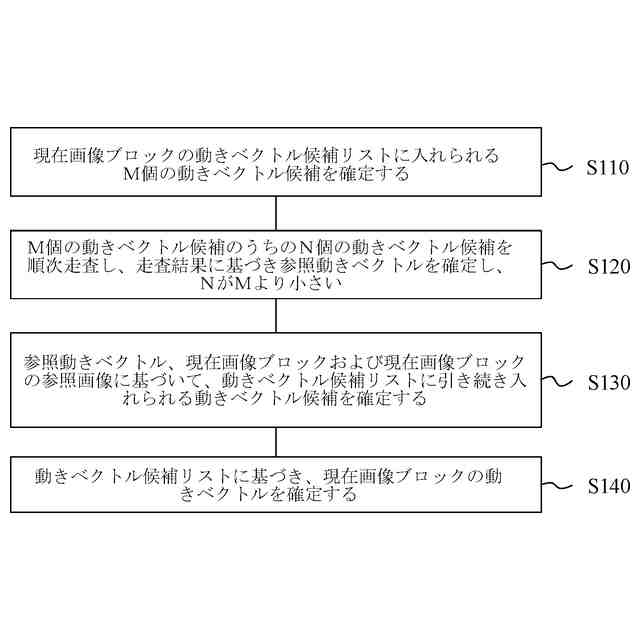
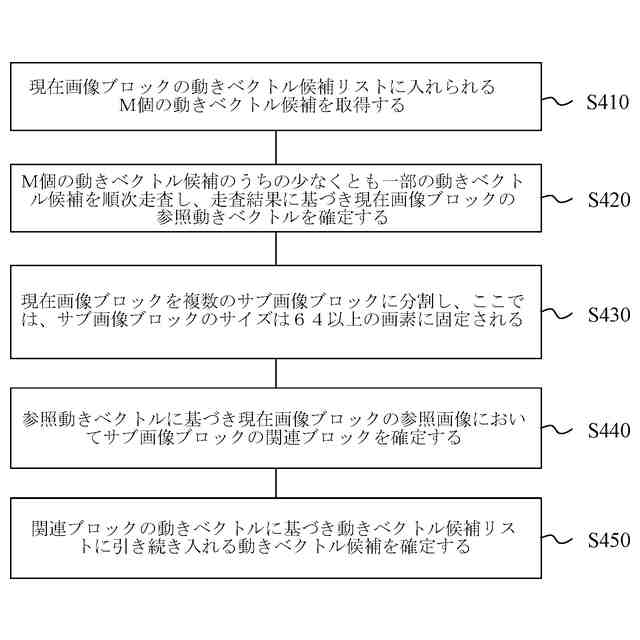
第1の態様は、動画像処理方法を提供し、該方法は、
現在画像ブロックの予め設定されたM個の近傍ブロックのうち、Mよりも小さいN個の近傍ブロックを順次走査し、走査結果に基づき対象近傍ブロックを確定することと、
前記対象近傍ブロックの動きベクトル、前記現在画像ブロック、および前記現在画像ブロックの参照画像に基づき、前記現在画像ブロックの関連ブロックを確定することと、
前記現在画像ブロックと前記関連ブロックを同じ方法で複数のサブ画像ブロックに分割し、前記現在画像ブロック中の各サブ画像ブロックは、前記関連ブロック中の各サブ画像ブロックと1対1に対応させることと、
前記関連ブロック中の各サブ画像ブロックの動きベクトルに基づき、前記現在画像ブロック中の対応するサブ画像ブロックをそれぞれ予測することとを含む。
【0010】
本出願により提供される解決策では、現在画像ブロックの参照動きベクトルを取得するプロセスにおいて、すでに取得したM個の動きベクトル候補のうちN(NはMより小さい)個の動きベクトル候補のみを順次走査し、従来技術に比べて、現在画像ブロックの参照動きベクトルを取得するプロセスにおける動きベクトル候補に対する走査回数を減らすことができる。本出願により提供される解決策を従来のATMVP技術のステップ1に適用することで、それにおける冗長操作を簡略化することができることを理解されたい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
音響装置
24日前
個人
携帯端末保持具
27日前
個人
防犯AIプラグイン
2か月前
個人
テレビ会議拡張システム
2か月前
日本精機株式会社
投影システム
1か月前
日本無線株式会社
音声通信方式
24日前
日本放送協会
無線通信装置
2か月前
日本精機株式会社
車両用表示装置
11日前
キヤノン株式会社
通信装置
13日前
キヤノン電子株式会社
画像読取装置
24日前
キヤノン電子株式会社
画像処理装置
2か月前
個人
無線中継赤外線コピーリモコン
2か月前
TOA株式会社
音響システム
2か月前
キヤノン電子株式会社
画像読取装置
27日前
ヤマハ株式会社
音響出力装置
1か月前
個人
補聴器のイヤピース耳穴挿入具
17日前
キヤノン電子株式会社
画像読取装置
1か月前
ヤマハ株式会社
音響出力装置
1か月前
日本放送協会
映像伝送システム
26日前
オムロン株式会社
スレーブ装置
1か月前
キヤノン株式会社
映像表示装置
1か月前
株式会社ヴィーネックス
カメラ
18日前
キヤノン株式会社
撮影システム
17日前
キヤノン株式会社
画像読取装置
1か月前
キヤノン株式会社
画像処理装置
6日前
キヤノン株式会社
画像処理装置
26日前
キヤノン株式会社
画像表示装置
2日前
株式会社シグマ
撮像素子及び撮像装置
24日前
リオン株式会社
電気機械変換器
11日前
株式会社クーネル
音響装置
5日前
シャープ株式会社
表示装置
10日前
シャープ株式会社
電子機器
18日前
株式会社ユピテル
撮像装置等
2か月前
株式会社国際電気
無線通信システム
13日前
株式会社バッファロー
無線通信装置
26日前
アイホン株式会社
インターホン機器
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ