TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025084445
公報種別
公開特許公報(A)
公開日
2025-06-03
出願番号
2023198356
出願日
2023-11-22
発明の名称
無人搬送システム
出願人
ヤマハ発動機株式会社
代理人
個人
,
個人
主分類
B65G
1/00 20060101AFI20250527BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】無人搬送車と設備との間で物品の受け渡しを良好に行うことができる無人搬送システムを提供すること。
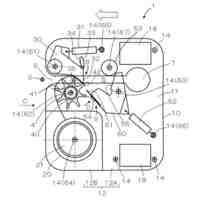
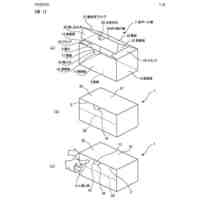
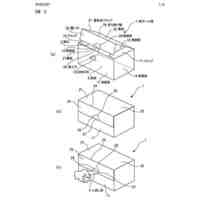
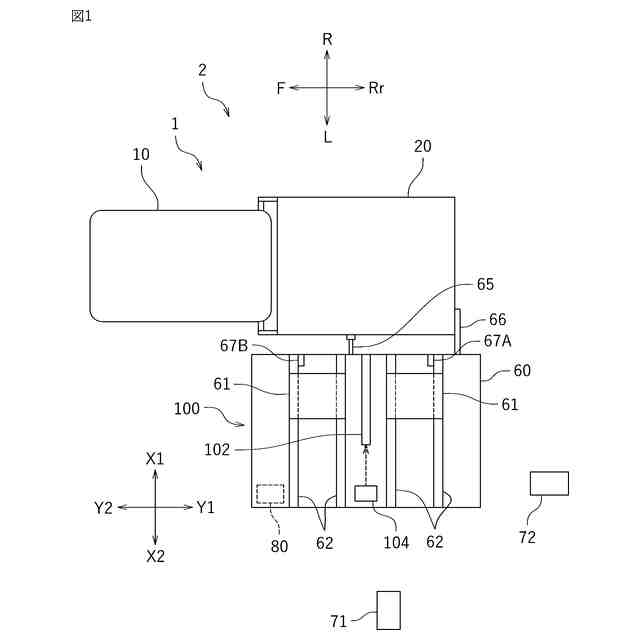
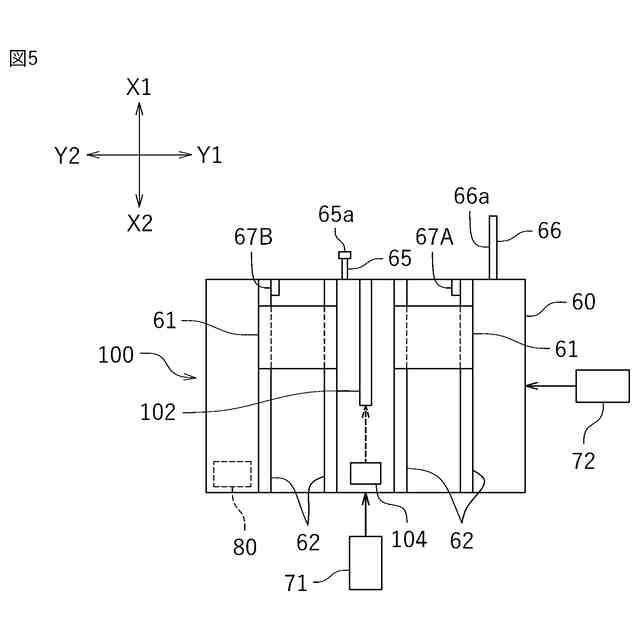
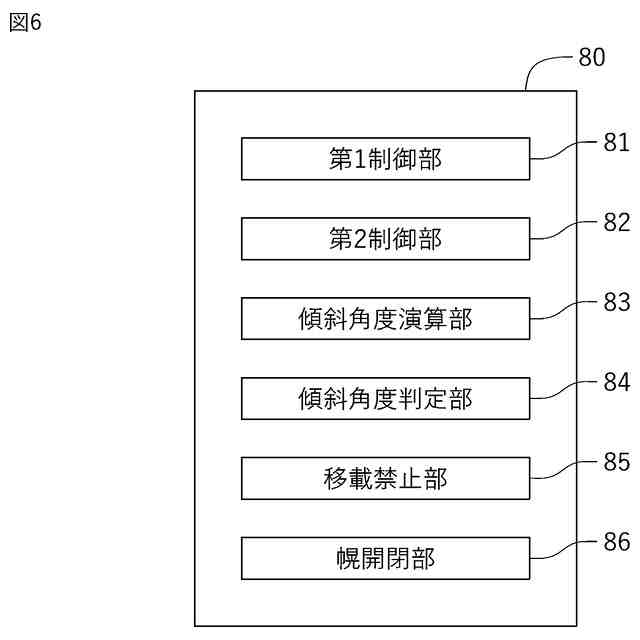
【解決手段】設備100は、設備100と無人搬送車1との間で物品を移動させる移載装置60と、移載装置60を前後方向に移動させる第1アクチュエータ71と、移載装置60を左右方向に移動させる第2アクチュエータ72と、移載装置60に設けられた第1接触部材65および第2接触部材66と、制御装置80とを備える。制御装置80は、第1アクチュエータ71を駆動して移載装置60を前方に移動させ、第1接触部材65が無人搬送車1に接触すると第1アクチュエータ71を停止させる第1制御部と、第2アクチュエータ72を駆動して移載装置60を左右方向に移動させ、第2接触部材66が無人搬送車1に接触すると第2アクチュエータ72を停止させる第2制御部と、を有する。
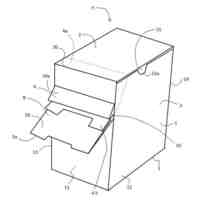
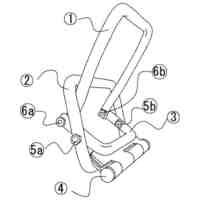
【選択図】図1
特許請求の範囲
【請求項1】
設備と無人搬送車とを備え、前記無人搬送車の側面が前記設備の正面と向かい合うように前記設備の手前に停止した前記無人搬送車と前記設備との間で物品の受け渡しを行う無人搬送システムであって、
前記設備は、
前記設備の前後方向および左右方向に移動可能に構成され、前記設備と前記無人搬送車との間で物品を移動させる移載装置と、
前記移載装置を前記設備の前後方向に移動させる第1アクチュエータと、
前記移載装置を前記設備の左右方向に移動させる第2アクチュエータと、
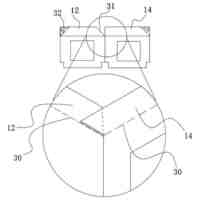
前記移載装置に設けられ、前記設備の前後方向の前方を向いた第1接触面を有する第1接触部材と、
前記移載装置に設けられ、前記設備の左右方向の左方または右方を向いた第2接触面を有する第2接触部材と、
前記第1アクチュエータを駆動して前記移載装置を前記設備の前後方向の前方に移動させ、前記第1接触面が前記無人搬送車に接触すると前記第1アクチュエータを停止させる第1制御部と、前記第2アクチュエータを駆動して前記移載装置を前記設備の左右方向に移動させ、前記第2接触面が前記無人搬送車に接触すると前記第2アクチュエータを停止させる第2制御部と、を有する制御装置と、
を備えている、無人搬送システム。
続きを表示(約 1,000 文字)
【請求項2】
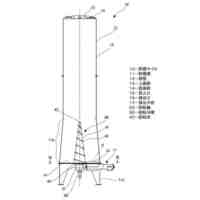
前記設備は、前記移載装置に対する前記無人搬送車の車両左右方向の傾斜角度を検出する傾斜角度検出装置を備え、
前記制御装置は、前記傾斜角度検出装置により検出される前記傾斜角度が予め定められた閾値以上の場合に、前記移載装置による前記物品の移載を禁止する移載禁止部を有している、請求項1に記載の無人搬送システム。
【請求項3】
前記傾斜角度検出装置は、前記無人搬送車との距離を測定する第1レーザ変位計と、前記第1レーザ変位計よりも前記設備の左右方向の右方に配置され、前記無人搬送車との距離を測定する第2レーザ変位計と、前記第1レーザ変位計および前記第2レーザ変位計により測定された距離に基づいて前記無人搬送車の車両左右方向の傾斜角度を演算する演算装置と、を有している、請求項2に記載の無人搬送システム。
【請求項4】
前記第1接触部材は、前記移載装置から前記設備の前後方向の前方に延びる棒状部材からなっている、請求項1に記載の無人搬送システム。
【請求項5】
前記第2接触部材は、前記移載装置から前記設備の前後方向の前方に延び、前記設備の前後方向および上下方向に延びる板状部材からなっている、請求項1に記載の無人搬送システム。
【請求項6】
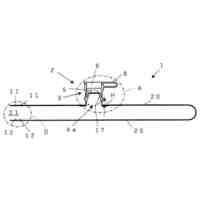
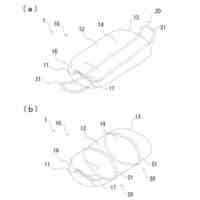
前記無人搬送車は、
駆動輪と前記駆動輪を駆動する走行用駆動源とを有する牽引車と、
従動輪と前記物品が載置される載置部とを有する台車と、
前記牽引車と前記台車とを連結する連結装置と、を備え、
前記台車は、前記第1接触面と接触する第1被接触面と、前記第2接触面と接触する第2被接触面と、を有している、請求項1に記載の無人搬送システム。
【請求項7】
前記無人搬送車は、
駆動輪と前記駆動輪を駆動する走行用駆動源とを有する牽引車と、
従動輪と前記物品が載置される載置部とを有する台車と、
前記牽引車と前記台車とを連結する連結装置と、を備え、
前記台車は、前記第1接触面と接触する第1被接触面と、前記第2接触面と接触する第2被接触面と、を有し、
前記傾斜角度検出装置は、前記移載装置に対する前記台車の車両左右方向の傾斜角度を検出するように構成されている、請求項2に記載の無人搬送システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、設備と、設備と物品の受け渡しを行う無人搬送車とを備えた無人搬送システムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来から、工場等において、一の設備から他の一の設備に物品を搬送する無人搬送車が用いられている。例えば特許文献1に、そのような設備および無人搬送車が記載されている。無人搬送車は設備に向かって走行し、設備の手前に停止した後、設備と物品の受け渡しを行う。
【先行技術文献】
【特許文献】
【0003】
特開平4-147303号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記のような無人搬送システムにおいて、無人搬送車が設備の手前で自動的に停止した後、無人搬送車の位置が設備に対してずれていると、無人搬送車と設備との間で物品の受け渡しを良好に行うことができない。
【0005】
本発明の目的は、無人搬送車と設備との間で物品の受け渡しを良好に行うことができる無人搬送システムを提供することである。
【課題を解決するための手段】
【0006】
ここに開示される無人搬送システムは、設備と無人搬送車とを備え、前記無人搬送車の側面が前記設備の正面と向かい合うように前記設備の手前に停止した前記無人搬送車と前記設備との間で物品の受け渡しを行う無人搬送システムである。前記設備は、前記設備の前後方向および左右方向に移動可能に構成され、前記設備と前記無人搬送車との間で物品を移動させる移載装置と、前記移載装置を前記設備の前後方向に移動させる第1アクチュエータと、前記移載装置を前記設備の左右方向に移動させる第2アクチュエータと、前記移載装置に設けられ、前記設備の前後方向の前方を向いた第1接触面を有する第1接触部材と、前記移載装置に設けられ、前記設備の左右方向の左方または右方を向いた第2接触面を有する第2接触部材と、制御装置と、を備えている。前記制御装置は、前記第1アクチュエータを駆動して前記移載装置を前記設備の前後方向の前方に移動させ、前記第1接触面が前記無人搬送車に接触すると前記第1アクチュエータを停止させる第1制御部と、前記第2アクチュエータを駆動して前記移載装置を前記設備の左右方向に移動させ、前記第2接触面が前記無人搬送車に接触すると前記第2アクチュエータを停止させる第2制御部とを有する。
【0007】
上記無人搬送システムによれば、第1アクチュエータが移載装置を設備の前後方向に移動させた後、第1接触部材の第1接触面が無人搬送車に接触することにより、移載装置の設備の前後方向の移動が停止する。これにより、設備の前後方向に関して、移載装置は無人搬送車に対して予め定められた所定の位置に位置付けられる。また、第2アクチュエータが移載装置を設備の左右方向に移動させた後、第2接触部材の第2接触面が無人搬送車に接触することにより、移載装置の設備の左右方向の移動が停止する。これにより、設備の左右方向に関して、移載装置は無人搬送車に対して予め定められた所定の位置に位置付けられる。このようにして、移載装置に対する無人搬送車の車両左右方向および車両前後方向の位置ずれが防止される。よって、無人搬送車と設備との間で物品を良好に受け渡しすることができる。また、上記無人搬送システムによれば、位置決めのための機構(第1アクチュエータ、第2アクチュエータ、第1接触部材、および第2接触部材)は設備に備えられているので、無人搬送車の構成を簡単化することができる。無人搬送車を軽量化またはコストダウンすることができる。
【0008】
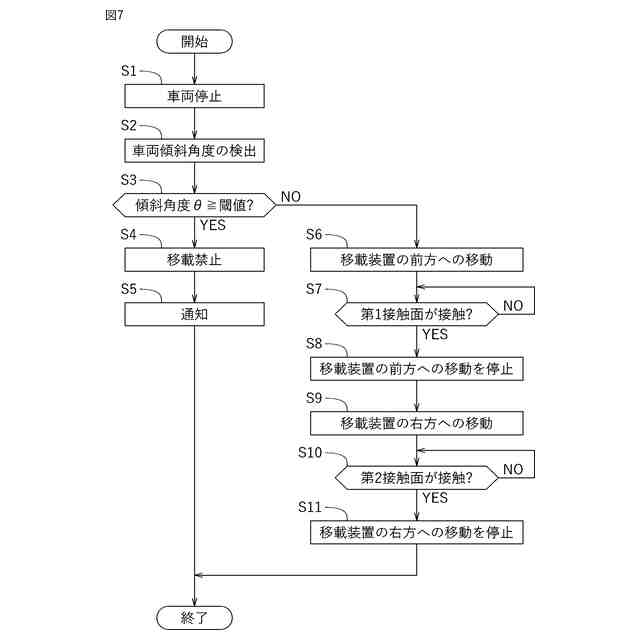
前記設備は、前記移載装置に対する前記無人搬送車の車両左右方向の傾斜角度を検出する傾斜角度検出装置を備えていてもよい。前記制御装置は、前記傾斜角度検出装置により検出される前記傾斜角度が予め定められた閾値以上の場合に、前記移載装置による前記物品の移載を禁止する移載禁止部を有していてもよい。
【0009】
このことにより、移載装置に対する無人搬送車の車両左右方向の位置ずれがないこと、移載装置に対する無人搬送車の車両前後方向の位置ずれがないこと、および、移載装置に対して無人搬送車が傾いていないことを確認したうえで、無人搬送車と設備との物品の受け渡しを実行することができる。そのため、無人搬送車と設備との間で物品の受け渡しを良好に行うことができる。
【0010】
前記傾斜角度検出装置は、前記無人搬送車との距離を測定する第1レーザ変位計と、前記第1レーザ変位計よりも前記設備の左右方向の右方に配置され、前記無人搬送車との距離を測定する第2レーザ変位計と、前記第1レーザ変位計および前記第2レーザ変位計により測定された距離に基づいて前記無人搬送車の車両左右方向の傾斜角度を演算する演算装置と、を有していてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
箱
9か月前
個人
収容箱
18日前
個人
ゴミ箱
9か月前
個人
包装体
10か月前
個人
コンベア
2か月前
個人
段ボール箱
4か月前
個人
段ボール箱
4か月前
個人
ゴミ収集器
4か月前
個人
容器
6か月前
個人
楽ちんハンド
2か月前
個人
折り畳み水槽
10か月前
個人
パウチ補助具
9か月前
個人
宅配システム
4か月前
個人
角筒状構造体
2か月前
個人
土嚢運搬器具
5か月前
個人
お薬の締結装置
3か月前
個人
閉塞装置
7か月前
個人
コード類収納具
5か月前
個人
ダンボール宝箱
10か月前
個人
圧縮収納袋
10か月前
個人
蓋閉止構造
1か月前
株式会社コロナ
梱包材
2か月前
個人
ゴミ処理機
6か月前
株式会社和気
包装用箱
6か月前
個人
把手付米袋
1か月前
個人
貯蔵サイロ
4か月前
個人
蓋閉止構造
1か月前
三甲株式会社
蓋体
6か月前
個人
輸送積荷用動吸振器
3か月前
株式会社イシダ
搬送装置
3か月前
個人
コード折り畳み器具
1か月前
個人
袋入り即席麺
4か月前
個人
包装箱
7か月前
株式会社新弘
容器
9か月前
株式会社KY7
封止装置
17日前
個人
粘着テープ剥がし具
11か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ