TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025077830
公報種別
公開特許公報(A)
公開日
2025-05-19
出願番号
2023190316
出願日
2023-11-07
発明の名称
電動車のための制御システム
出願人
トヨタ自動車株式会社
,
株式会社デンソー
代理人
弁理士法人 快友国際特許事務所
主分類
B60L
3/00 20190101AFI20250512BHJP(車両一般)
要約
【課題】退避走行を適切に実行し得る技術を提供すること。
【解決手段】車両制御装置は、ロジック回路及び第2のプロセッサと、第1のプロセッサを介することなく通信可能であるとともに、第1のプロセッサに異常が発生した場合に、電動車を退避走行させる退避走行モードを実行するように構成され、退避走行モードでは、車両制御装置は、第1のモータに対する退避走行用の目標トルクをロジック回路へ出力するとともに、第2のモータに対する退避走行用の目標トルクを第2のプロセッサへ出力し、ロジック回路は、車両制御装置から受信した第1のモータに対する退避走行用の目標トルクに基づいて、第1の電力制御ユニットを制御し、第2のプロセッサは、車両制御装置から受信した第2のモータに対する退避走行用の目標トルクに基づいて、第2の電力制御ユニットを制御する。
【選択図】図1
特許請求の範囲
【請求項1】
電動車のための制御システムであって、
前記電動車は、
少なくとも一つの第1のモータを含む第1のモータユニットと、
少なくとも一つの第2のモータを含む第2のモータユニットと、
前記第1のモータユニットの前記第1のモータへの供給電力を調節する第1の電力制御ユニットと、
前記第2のモータユニットの前記第2のモータへの供給電力を調節する第2の電力制御ユニットと、
を備え、
前記制御システムは、
前記第1のモータ及び前記第2のモータに対する目標トルクを出力する車両制御装置と、
前記車両制御装置と通信可能に構成され、前記車両制御装置から出力された前記目標トルクに基づいて、前記第1の電力制御ユニット及び前記第2の電力制御ユニットを制御するモータ制御装置と、
を備え、
前記モータ制御装置は、
前記車両制御装置と通信可能に構成され、前記車両制御装置から受信した前記第1のモータに対する前記目標トルクに基づいて、前記第1の電力制御ユニットを制御する第1のプロセッサと、
前記第1のプロセッサと通信可能に構成され、前記車両制御装置から前記第1のプロセッサを介して受信した前記第2のモータに対する前記目標トルクに基づいて、前記第2の電力制御ユニットを制御する第2のプロセッサと、
前記第1のプロセッサ及び前記第2のプロセッサと通信可能に構成され、前記第1のプロセッサ及び前記第2のプロセッサの状態を監視するロジック回路と、
を備え、
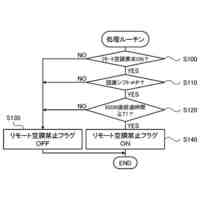
前記車両制御装置は、前記ロジック回路及び前記第2のプロセッサと、前記第1のプロセッサを介することなく通信可能であるとともに、前記第1のプロセッサに異常が発生した場合に、前記電動車を退避走行させる退避走行モードを実行するように構成され、
前記退避走行モードでは、
前記車両制御装置は、前記第1のモータに対する退避走行用の目標トルクを前記ロジック回路へ出力するとともに、前記第2のモータに対する退避走行用の目標トルクを前記第2のプロセッサへ出力し、
前記ロジック回路は、前記車両制御装置から受信した前記第1のモータに対する前記退避走行用の目標トルクに基づいて、前記第1の電力制御ユニットを制御し、
前記第2のプロセッサは、前記車両制御装置から受信した前記第2のモータに対する前記退避走行用の目標トルクに基づいて、前記第2の電力制御ユニットを制御する、
制御システム。
発明の詳細な説明
【技術分野】
【0001】
本明細書が開示する技術は、電動車のための制御システムに関する。
続きを表示(約 3,100 文字)
【背景技術】
【0002】
特許文献1には、2個のモータを備える電動車の制御装置が開示されている。制御装置は、2個のモータのそれぞれを制御する2個のMGマイコンを備える。また、制御装置は、MGマイコンの異常を検出する異常検出部を備える。異常検出部はASICに接続されており、MGマイコンの異常を検出する場合にその異常を示す信号をASICに出力する。ASICは、マイコンに異常が生じた際に、電動車を退避走行させる機能を備える。
【先行技術文献】
【特許文献】
【0003】
特開2023-069457号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の技術において、一方のMGマイコンに異常が生じることに応じてASICによって電動車が退避走行される場合に、異常が検出されない他方のMGマイコンも同時にリセットされる。この場合、他方のMGマイコンは動作しないので、他方のMGマイコンによって制御されるモータは駆動されない。また、当該モータにおいては、電動車が退避走行することで当該モータが発電機として機能して、逆起電圧が発生する。電動車のバッテリ電圧がこの逆起電圧よりも大きくないと電動車は走行できなくなってしまう。即ち、退避走行を適切に実行できなくなるおそれがある。特許文献1の技術では、このような異常が検出されないMGマイコンに対応するモータの影響について考慮されていない。本明細書では、退避走行を適切に実行し得る技術を提供する。
【課題を解決するための手段】
【0005】
本明細書は、電動車のための制御システムを開示する。前記電動車は、少なくとも一つ第1のモータを含む第1のモータユニットと、少なくとも一つの第2のモータを含む第2のモータユニットと、前記第1のモータユニットの前記第1のモータへの供給電力を調節する第1の電力制御ユニットと、前記第2のモータユニットの前記第2のモータへの供給電力を調節する第2の電力制御ユニットと、を備え、前記制御システムは、前記第1のモータ及び前記第2のモータに対する目標トルクを出力する車両制御装置と、前記車両制御装置と通信可能に構成され、前記車両制御装置から出力された前記目標トルクに基づいて、第1の電力制御ユニット及び第2の電力制御ユニットを制御するモータ制御装置と、を備え、前記モータ制御装置は、前記車両制御装置と通信可能に構成され、前記車両制御装置から受信した前記第1のモータに対する前記目標トルクに基づいて、前記第1の電力制御ユニットを制御する第1のプロセッサと、前記第1のプロセッサと通信可能に構成され、前記車両制御装置から前記第1のプロセッサを介して受信した前記第2のモータに対する前記目標トルクに基づいて、前記第2の電力制御ユニットを制御する第2のプロセッサと、前記第1のプロセッサ及び前記第2のプロセッサと通信可能に構成され、前記第1のプロセッサ及び前記第2のプロセッサの状態を監視するロジック回路と、を備え、前記車両制御装置は、前記ロジック回路及び前記第2のプロセッサと、前記第1のプロセッサを介することなく通信可能であるとともに、前記第1のプロセッサに異常が発生した場合に、前記電動車を退避走行させる退避走行モードを実行するように構成され、前記退避走行モードでは、前記車両制御装置は、前記第1のモータに対する退避走行用の目標トルクを前記ロジック回路へ出力するとともに、前記第2のモータに対する退避走行用の目標トルクを前記第2のプロセッサへ出力し、前記ロジック回路は、前記車両制御装置から受信した前記第1のモータに対する前記退避走行用の目標トルクに基づいて、前記第1の電力制御ユニットを制御し、前記第2のプロセッサは、前記車両制御装置から受信した前記第2のモータに対する前記退避走行用の目標トルクに基づいて、前記第2の電力制御ユニットを制御する。
【0006】
上記の構成によると、第1のプロセッサに異常が発生した場合に、車両制御装置は、第1のプロセッサを介することなく、ロジック回路及び第2のプロセッサと通信することができる。従って、車両制御装置は、退避走行モードを実行するときに、第2のモータに対する退避走行用の目標トルクを、第2のプロセッサへ直接的に指示することができる。これにより、上記のような問題、即ち、退避走行時に第2のモータで生じる逆起電圧を打ち消すことができる。電動車の退避走行が適切に実行される。
【図面の簡単な説明】
【0007】
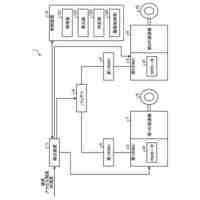
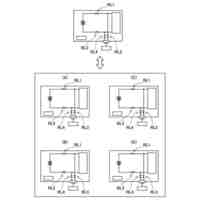
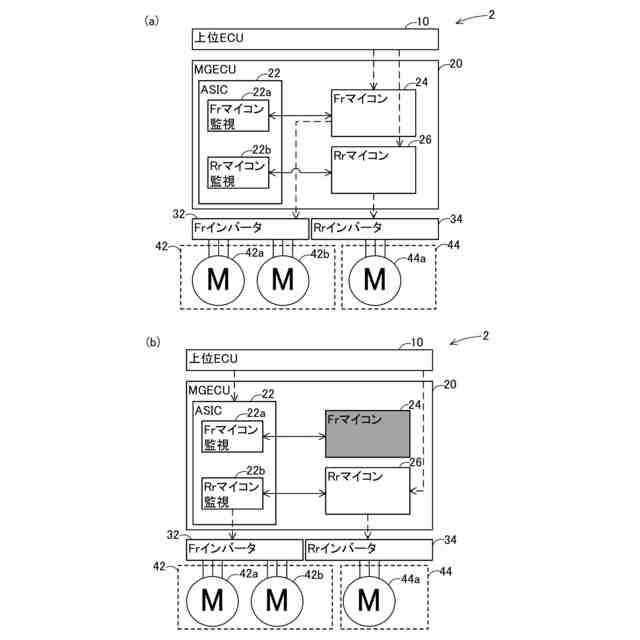
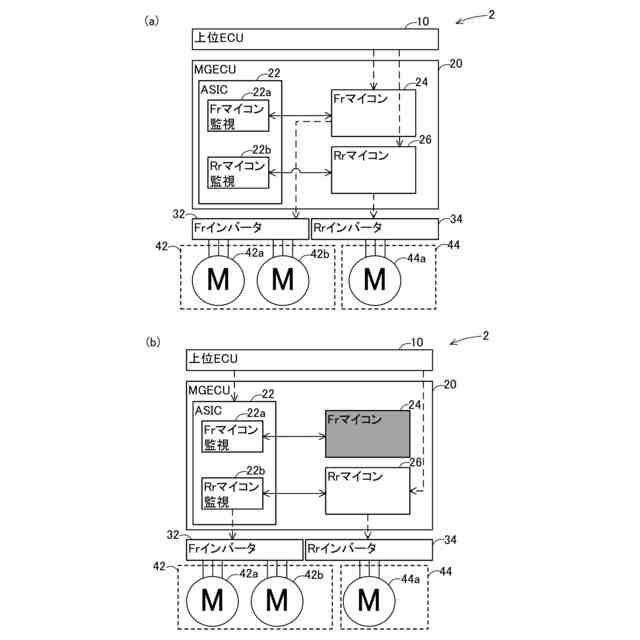
図1(a)は、本実施例の制御システムにおける通常時の制御を説明するためのシステム概略図であり、図1(b)は、本実施例の制御システムにおけるFrマイコン異常時の制御を説明するためのシステム概略図である。
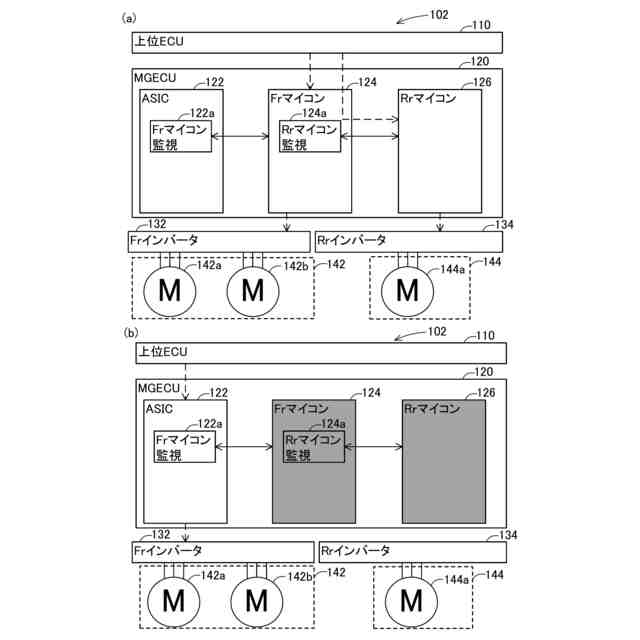
図2(a)は、従来の制御システムにおける通常時の制御を説明するためのシステム概略図であり、図2(b)は、従来の制御システムにおけるFrマイコン異常時の制御を説明するためのシステム概略図である。
【発明を実施するための形態】
【0008】
(制御システム2の構成;図1)
本実施例の制御システム2は、車両を駆動する走行用のモータを有する電動車(例えば、電気自動車、ハイブリッド車、プラグインハイブリッド車、燃料電池車等)に搭載される。特に、本実施例の制御システム2は、四輪駆動の電動車に搭載される。図1(a)に示されるように、制御システム2は、上位ECU(Electronic Control Unitの略)10と、MGECU20と、2個のインバータ32,34と、2個のモータユニット42,44と、を備える。モータユニット42は、電動車の前輪を駆動させるための2個の走行用モータ42a,42bを含む。モータユニット44は、電動車の後輪を駆動させるためのモータ44aを含む。
【0009】
上位ECU10は、例えばアクセル開度等に基づいて、各モータ42a,42b,44aのそれぞれの目標とする出力を示す目標トルクを出力する。MGECU20は、上位ECU10と通信可能に構成されている。MGECU20は、上位ECU10から出力された目標トルクに基づいて、インバータ32,34を制御する。具体的には、MGECU20は、目標トルクに基づいて、インバータ32,34に駆動信号(例えばPWM信号)を出力する。
【0010】
MGECU20は、ASIC(Application Specific Integrated Circuitの略)22と、前輪駆動用マイコン(以下、Frマイコンと記載する)24と、後輪駆動用マイコン(以下、Rrマイコンと記載する)26と、を備える。ASIC22は、Frマイコン24及びRrマイコン26と通信可能に構成される。ASIC22は、Frマイコン24及びRrマイコン26の状態を監視する。即ち、ASIC22は、Frマイコン24の状態を監視する回路構造22aを有すると共に、Rrマイコン26の状態を監視する回路構造22bを有する。さらに、ASIC22は、モータ制御に特化したハード部分(例えばレゾルバデジタルコンバータ、アナログデジタルコンバータ、モータ制御IP等)のうちの一部若しくは全部の機能を有する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
方法
19日前
トヨタ自動車株式会社
車両
19日前
トヨタ自動車株式会社
方法
22日前
トヨタ自動車株式会社
車両
11日前
トヨタ自動車株式会社
電池
5日前
トヨタ自動車株式会社
電池
5日前
トヨタ自動車株式会社
車両
26日前
トヨタ自動車株式会社
電池
4日前
トヨタ自動車株式会社
電池
5日前
トヨタ自動車株式会社
電池
1日前
トヨタ自動車株式会社
電池
1日前
トヨタ自動車株式会社
車両
26日前
トヨタ自動車株式会社
金型
6日前
トヨタ自動車株式会社
車両
26日前
トヨタ自動車株式会社
組電池
22日前
トヨタ自動車株式会社
電動車
18日前
トヨタ自動車株式会社
電動車
7日前
トヨタ自動車株式会社
電動車
19日前
トヨタ自動車株式会社
電動車
11日前
トヨタ自動車株式会社
自動車
26日前
トヨタ自動車株式会社
正極合材
1日前
トヨタ自動車株式会社
電動車両
20日前
トヨタ自動車株式会社
集合導線
7日前
トヨタ自動車株式会社
制御装置
11日前
トヨタ自動車株式会社
ステータ
6日前
トヨタ自動車株式会社
二次電池
6日前
トヨタ自動車株式会社
制御装置
7日前
トヨタ自動車株式会社
ステータ
6日前
トヨタ自動車株式会社
充電装置
18日前
トヨタ自動車株式会社
制御装置
26日前
トヨタ自動車株式会社
検査装置
20日前
トヨタ自動車株式会社
蓄電セル
4日前
トヨタ自動車株式会社
蓄電装置
1日前
トヨタ自動車株式会社
蓄電セル
4日前
トヨタ自動車株式会社
蓄電装置
1日前
トヨタ自動車株式会社
電源装置
8日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ