TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025077776
公報種別
公開特許公報(A)
公開日
2025-05-19
出願番号
2023190231
出願日
2023-11-07
発明の名称
トランスデューサ及び音響トランスデューサ
出願人
ローム株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
H04R
17/00 20060101AFI20250512BHJP(電気通信技術)
要約
【課題】振動膜1の短手方向(Y方向)の曲げモードBFを長手方向(X方向)の曲げモードM1、M2、M3に対して相対的に抑制する。
【解決手段】トランスデューサ100は、単結晶シリコンからなり、長手方向(X方向)の少なくとも一の端部1aが固定端である振動膜1と、振動膜1の固定端1aが連結された膜支持部2と、振動膜1の主面1Aに配置された圧電素子3とを有する。主面1A及び長手方向(X方向)は、単結晶シリコンの{011}面及び<100>方向、または{011}面を{011}面内の任意の軸周りに-20°以上20°以下の範囲で回転させた結晶面、及び回転前の<100>方向に相当する結晶方位である。
【選択図】図1B
特許請求の範囲
【請求項1】
単結晶シリコンからなり、長手方向の少なくとも一の端部が固定端である振動膜と、
前記振動膜の前記固定端が連結された膜支持部と、
前記振動膜の主面に配置された圧電素子と、を有し、
前記主面及び前記長手方向は、前記単結晶シリコンの{011}面及び<100>方向、または前記{011}面を前記{011}面内の任意の軸周りに-20°以上20°以下の範囲で回転させた結晶面、及び回転前の前記<100>方向に相当する結晶方位である、トランスデューサ。
続きを表示(約 760 文字)
【請求項2】
前記主面及び前記長手方向は、前記単結晶シリコンの{011}面及び<100>方向、または前記{011}面を前記{011}面内の任意の軸周りに-10°以上10°以下の範囲で回転させた結晶面、及び回転前の前記<100>方向に相当する結晶方位である、請求項1に記載のトランスデューサ。
【請求項3】
前記主面及び前記長手方向は、前記単結晶シリコンの{011}面及び<100>方向、または前記{011}面を前記{011}面内の任意の軸周りに-5°以上5°以下の範囲で回転させた結晶面、及び回転前の前記<100>方向に相当する結晶方位である、請求項1に記載のトランスデューサ。
【請求項4】
前記長手方向の他方の端部は自由端である、請求項1記載のトランスデューサ。
【請求項5】
前記長手方向の両方の端部が固定端である、請求項1記載のトランスデューサ。
【請求項6】
微小電気機械システムにより構成された、請求項1記載のトランスデューサ。
【請求項7】
前記振動膜に伝わる振動によって前記圧電素子に加わる圧力を電圧信号へ変換する、請求項1記載のトランスデューサ。
【請求項8】
前記圧電素子に電圧信号を入力して前記圧電素子を変形させることによって、前記振動膜に振動を発生させる、請求項1記載のトランスデューサ。
【請求項9】
請求項7記載のトランスデューサであって、可聴域の音波又は超音波を前記振動膜の振動へ変換する、音響トランスデューサ。
【請求項10】
請求項8記載のトランスデューサであって、前記振動膜の振動を可聴域の音波又は超音波へ変換する、音響トランスデューサ。
発明の詳細な説明
【技術分野】
【0001】
本開示は、トランスデューサ及び音響トランスデューサに関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
特許文献1は、変位可能に構成された膜体部を備えるMEMS(Micro Electro Mechanical System)であって、圧電素子を用いて膜体部の変位を制御又は検知するトランスデューサを開示している。
【先行技術文献】
【特許文献】
【0003】
国際公開第2022/118575号
【0004】
[概要]
トランスデューサを含む全ての構造体は、特定の振動数において構造体の振動を増大させる共振モードを有している。共振時には振動膜が大きく変位して振動膜に大きな応力が加わるため、トランスデューサが破損する恐れがある。特に、平面視において振動膜の長手方向に交差する短手方向の変位に起因する振動膜の破損が実用上問題となることが多い。
【0005】
本開示の目的は、振動膜の短手方向の変位量を長手方向の変位量に対して相対的に抑制したトランスデューサ及び音響トランスデューサを提供することにある。
【0006】
上述した課題を解決するために、本開示の一態様は、単結晶シリコンからなり、長手方向の少なくとも一の端部が固定端である振動膜と、振動膜の固定端が連結された膜支持部と、振動膜の主面に配置された圧電素子とを有するトランスデューサである。振動膜の主面及び長手方向は、単結晶シリコンの{011}面及び<100>方向、または{011}面を{011}面内の任意の軸周りに-20°以上20°以下の範囲で回転させた結晶面、及び回転前の<100>方向に相当する結晶方位である。
【図面の簡単な説明】
【0007】
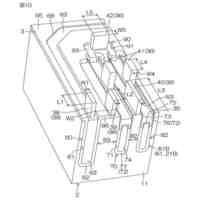
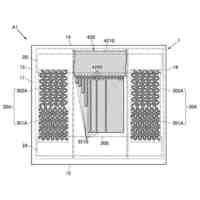
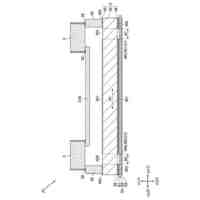
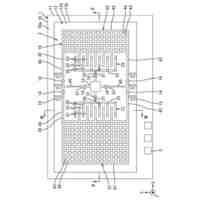
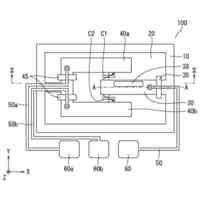
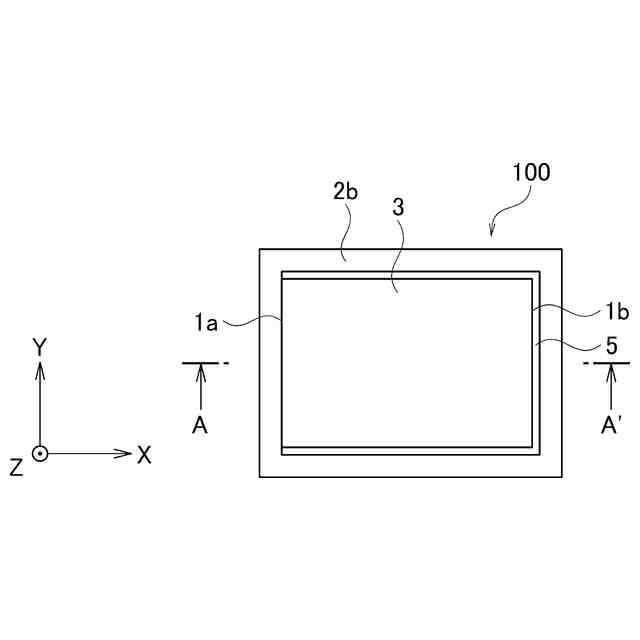
図1Aは、実施形態に係るトランスデューサ100の構成を示す平面図である。
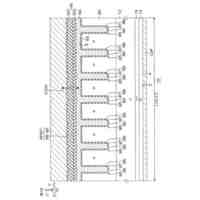
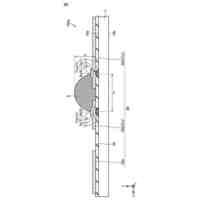
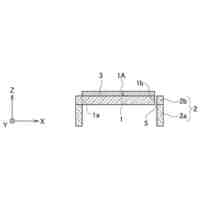
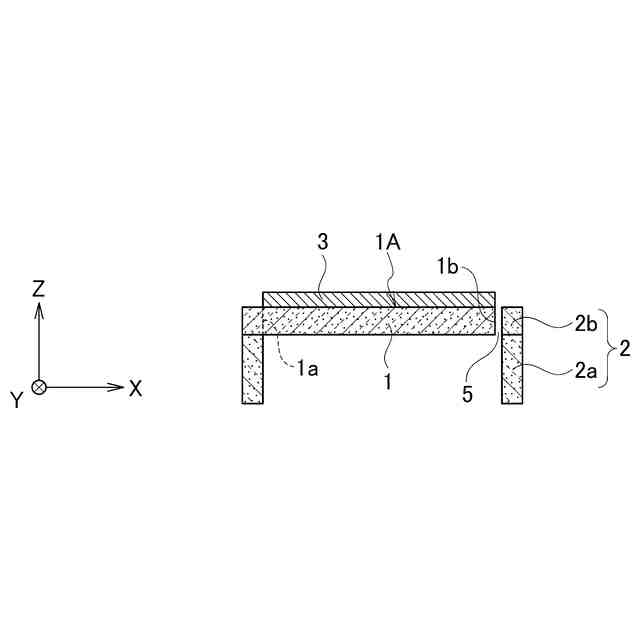
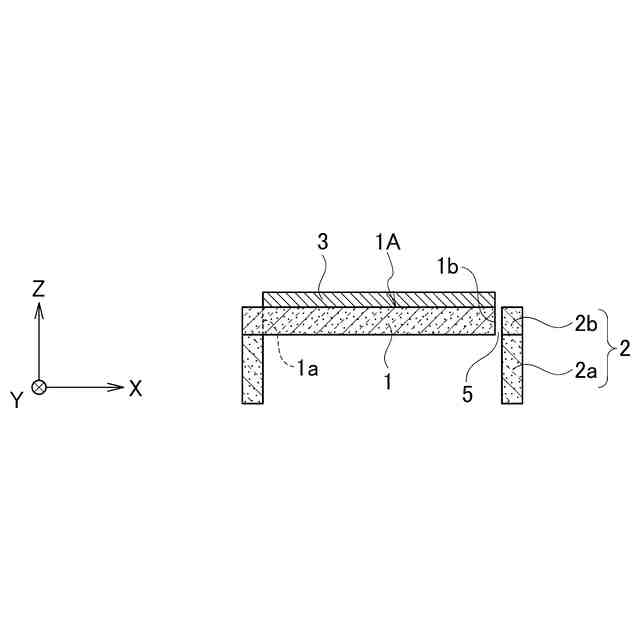
図1Bは、実施形態に係るトランスデューサ100の構成を示す断面図である。
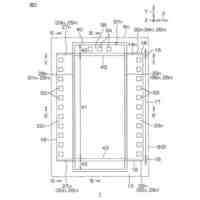
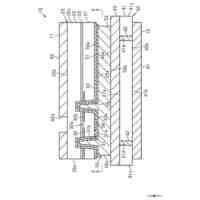
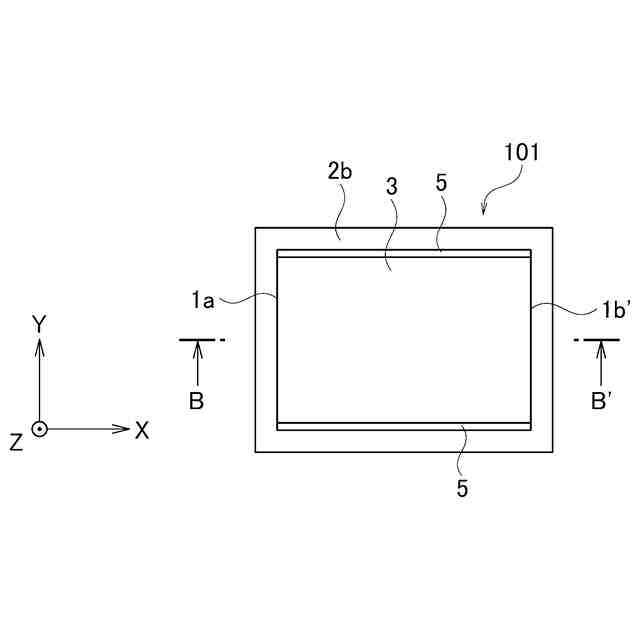
図2Aは、他の実施形態に係る、長手方向の両端(1a、1b’)が固定端である両持ち梁構造のトランスデューサ101の構成を示す平面図である。
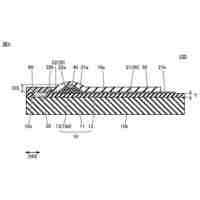
図2Bは、他の実施形態に係る、長手方向の両端(1a、1b’)が固定端である両持ち梁構造のトランスデューサ101の構成を示す断面図である。
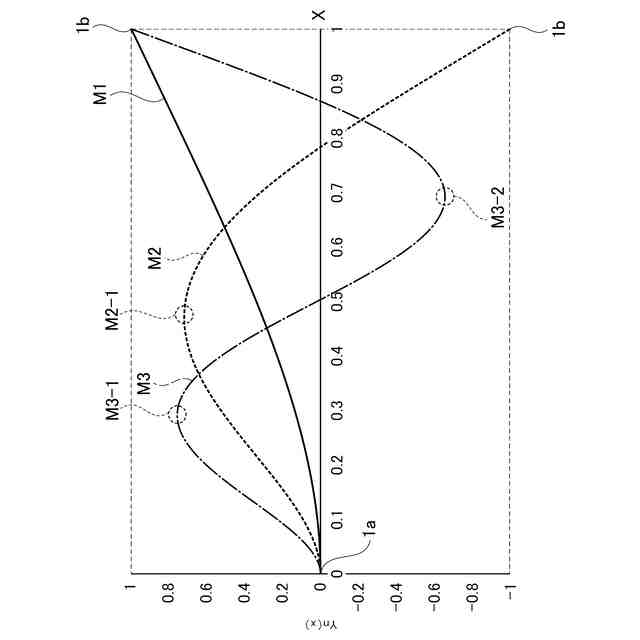
図3は、曲げ1次モードM1、曲げ2次モードM2、及び曲げ3次モードM3で共振している時の振動膜1の変位形状を示すグラフである。
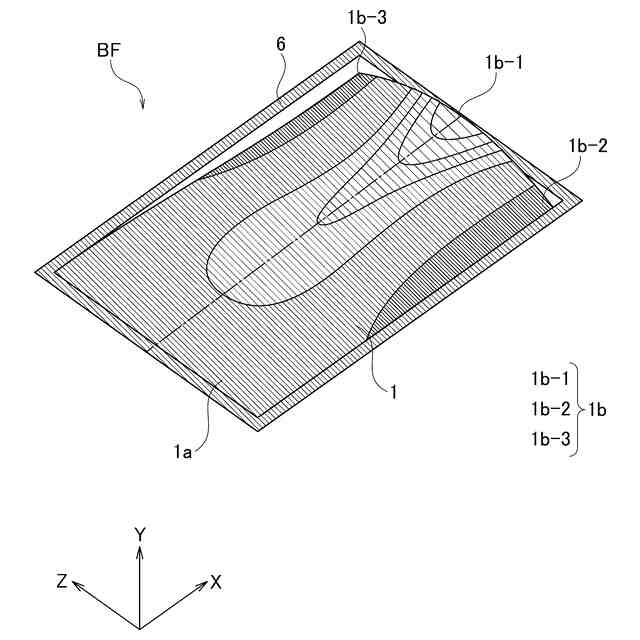
図4は、バタフライモードBFで共振している時の振動膜1の変位形状を示すコンター図である。
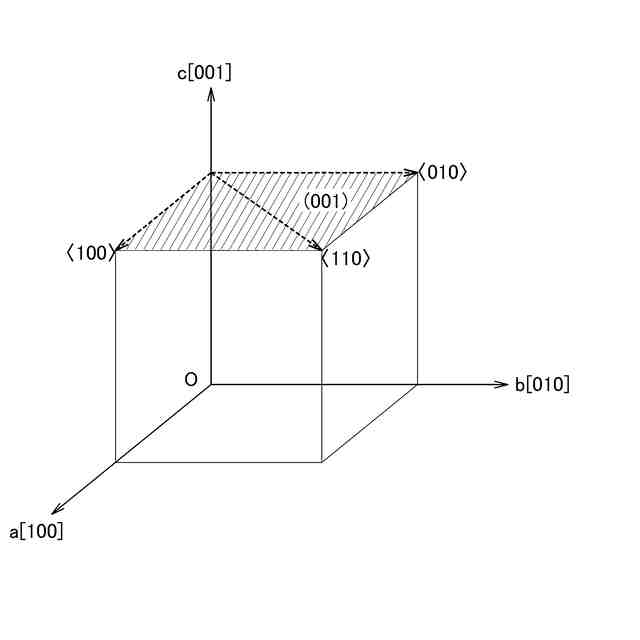
図5は、単結晶シリコンの単位格子における(001)面を示す模式図である。
図6Aは、比較例に係る振動膜1の長手方向(X方向)、短手方向(Y方向)及び膜厚方向(Z方向)のヤング率(Young’s modulus)(Ex、Ey、Ez)をそれぞれ示すグラフである。
図6Bは、比較例に係る振動膜1のポアソン比(Poisson’s ratio)(Vyz、Vzx、Vxy)を示すグラフである。
図6Cは、比較例に係る、長手方向の実効的なヤング率(Ex’)に対する短手方向の実効的なヤング率(Ey’)の割合(Ey’/Ex’)を示すグラフである。
図7は、単結晶シリコンの単位格子における(011)面を示す模式図である。
図8Aは、実施形態に係る振動膜1の長手方向(X方向)、短手方向(Y方向)及び膜厚方向(Z方向)のヤング率(Young’s modulus)(Ex、Ey、Ez)をそれぞれ示すグラフである。
図8Bは、実施形態に係る振動膜1のポアソン比(Poisson’s ratio)(Vyz、Vzx、Vxy)を示すグラフである。
図8Cは、実施形態に係る、長手方向の実効的なヤング率(Ex’)に対する短手方向の実効的なヤング率(Ey’)の割合(Ey’/Ex’)を示すグラフである。
図9は、様々な結晶面及び結晶方位における、曲げ1次モードM1の正規化後の最大変位量(1st bending/Static)を示すグラフである。
図10は、様々な結晶面及び結晶方位における、曲げ2次モードM2の正規化後の最大変位量(2nd bending/Static)を示すグラフである。
図11は、様々な結晶面及び結晶方位における、曲げ3次モードM3の正規化後の最大変位量(3rd bending/Static)を示すグラフである。
図12は、様々な結晶面及び結晶方位における、バタフライモードBFの正規化後の最大変位量(Butterfly/Static)を示すグラフである。
【0008】
[詳細な説明]
以下、複数の実施形態に係わるトランスデューサ及び音響トランスデューサについて、図面を参照しながら詳細に説明する。なお、以下で説明する実施形態は、包括的または具体的な例を示すものである。以下の実施形態で示される数値、形状、材料、構成要素、構成要素の設置位置及び接続形態は、一例であり、本開示に限定する主旨ではない。また、以下の実施形態における構成要素のうち、最上位概念を示す独立請求項に記載されていない構成要素については、任意の構成要素として説明される。さらに、図面の寸法比率は説明の都合上誇張されており、実際の比率と異なる場合がある。また、以下の実施形態及びその変形例には、同様の構成要素が含まれている場合があり、同様の構成要素には共通の符号を付与し、重複する説明を省略する。
【0009】
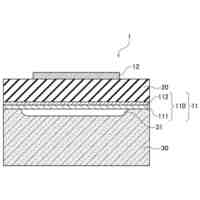
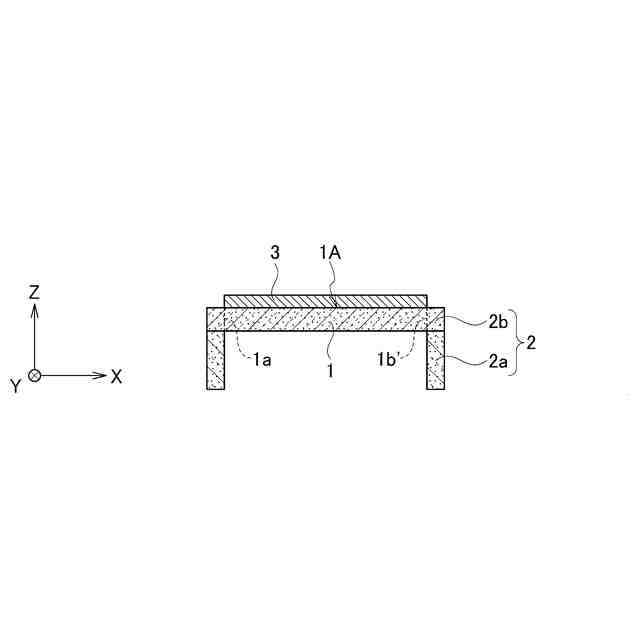
図1Aは、実施形態に係るトランスデューサ100の構成を示す平面図である。図1Bは、実施形態に係るトランスデューサ100の構成を示す断面図である。図1Bの断面図は、図1AのA-A’切断面に沿ったトランスデューサ100の断面を示す。
【0010】
図1A及び図1Bに示すように、実施形態に係るトランスデューサ100は、振動膜1と、膜支持部2と、圧電素子3とを有する。振動膜1は、可撓性のある薄膜であり、単結晶シリコンからなる。振動膜1は、カンチレバー構造を有する。すなわち、振動膜1の長手方向(X方向)の一方の端部1aが固定端であり、他方の端部1bが自由端である。振動膜1の平面形状は特に限定されないが、例えば、図1Aに示すように方形状の形状を有する。この場合、固定端1aは、4辺の内の1つの辺に位置し、自由端1bは、この1つの辺と向かい合う辺に位置する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
ローム株式会社
発振回路
7日前
ローム株式会社
半導体装置
4日前
ローム株式会社
半導体装置
25日前
ローム株式会社
チップ部品
今日
ローム株式会社
半導体装置
今日
ローム株式会社
半導体装置
17日前
ローム株式会社
半導体装置
6日前
ローム株式会社
加速度センサ
今日
ローム株式会社
差動入力回路
25日前
ローム株式会社
電池監視装置
7日前
ローム株式会社
スイッチ回路
6日前
ローム株式会社
スイッチ回路
6日前
ローム株式会社
AD変換装置
4日前
ローム株式会社
面発光レーザ装置
21日前
ローム株式会社
MEMS温度センサ
今日
ローム株式会社
逐次比較型AD変換回路
26日前
ローム株式会社
サーマルプリントヘッド
17日前
ローム株式会社
電子装置及び実装構造体
4日前
ローム株式会社
サーマルプリントヘッド
4日前
ローム株式会社
圧電素子及びその製造方法
4日前
ローム株式会社
半導体装置、電子機器、車両
25日前
ローム株式会社
半導体装置及び水晶発振装置
18日前
ローム株式会社
半導体装置、電子機器、車両
17日前
ローム株式会社
弾性波共振器および集積回路
4日前
ローム株式会社
ソースドライバ及び表示装置
4日前
ローム株式会社
データドライバ及び表示装置
4日前
ローム株式会社
通信装置、および通信システム
25日前
ローム株式会社
差動入力回路、および差動増幅器
25日前
ローム株式会社
駆動装置、超音波センサ、及び車両
3日前
ローム株式会社
ESD保護回路、およびトランシーバ
今日
ローム株式会社
電流生成装置および電流検出システム
今日
ローム株式会社
ノイズ検知回路及び表示パネル駆動装置
7日前
ローム株式会社
信号処理回路、加速度センサ、及び電子機器
7日前
ローム株式会社
逆接保護回路、半導体装置、電子機器、車両
4日前
ローム株式会社
トランスデューサ及び音響トランスデューサ
今日
ローム株式会社
半導体装置、モータシステム、車載機器、及び車両
17日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ