TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025068665
公報種別
公開特許公報(A)
公開日
2025-04-30
出願番号
2023178597
出願日
2023-10-17
発明の名称
運転支援装置及び運転支援方法
出願人
トヨタ自動車株式会社
代理人
弁理士法人プロスペック特許事務所
主分類
G08G
1/16 20060101AFI20250422BHJP(信号)
要約
【課題】減速位置の学習が完了するまでの時間を短縮できる運転支援装置を提供する。
【解決手段】運転支援装置は、運転者が減速操作を行った減速位置に車両が到達した場合、車両を自動で減速させる減速制御を実行する。運転支援装置は、運転者が減速操作を行ったときの車両の前方の環境に基いて、減速操作が減速位置の前方に設けられ且つ車両が減速する必要がある減速要求物に起因して行われたと判定した場合、減速操作が減速要求物に起因して行われていないと判定した場合よりも大きなスコアを減速位置の学習スコアに加算し、車両が到達した減速位置の学習スコアが閾値以上である場合、減速制御を実行する。
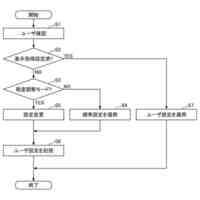
【選択図】 図2
特許請求の範囲
【請求項1】
運転者が減速操作を行った減速位置に車両が到達した場合、前記車両を自動で減速させる減速制御を実行する運転支援装置において、
前記運転支援装置は、
前記運転者が前記減速操作を行ったときの前記車両の前方の環境に基いて、前記減速操作が前記減速位置の前方に設けられ且つ前記車両が減速する必要がある減速要求物に起因して行われたと判定した場合、前記減速操作が前記減速要求物に起因して行われていないと判定した場合よりも大きなスコアを前記減速位置の学習スコアに加算し、
前記車両が到達した減速位置の学習スコアが閾値以上である場合、前記減速制御を実行する、
ように構成された、運転支援装置。
続きを表示(約 740 文字)
【請求項2】
請求項1に記載の運転支援装置において、
前記運転支援装置は、
前記車両の前方の環境に基いて、前記減速操作が前記車両の前方を走行する先行車に起因して行われたか否かを判定し、
前記減速操作が前記先行車に起因して行われたと判定した場合、前記減速操作が前記減速要求物及び前記先行車の何れにも起因して行われていないと判定した場合よりも小さなスコアを前記減速位置の学習スコアに加算する、
ように構成された、運転支援装置。
【請求項3】
請求項1に記載の運転支援装置において、
前記運転支援装置は、前記減速位置の学習スコアが前記閾値以上である場合、前記学習スコアが大きいほど前記減速制御において前記車両を強く減速するように構成された、
運転支援装置。
【請求項4】
第1車両及び第2車両の少なくとも一方を含む学習車両の運転者が減速操作を行った減速位置に前記第1車両が到達した場合、前記第1車両を自動で減速させる減速制御を前記車両に実行させる運転支援方法において、
前記運転支援方法は、
前記運転者が前記減速操作を行ったときの前記学習車両の前方の環境に基いて、前記減速操作が前記減速位置の前方に設けられ且つ前記学習車両が減速する必要がある減速要求物に起因して行われたと判定した場合、前記減速操作が前記減速要求物に起因して行われていないと判定した場合よりも大きなスコアが前記減速位置の学習スコアに加算されるステップと
前記第1車両が到達した減速位置の学習スコアが閾値以上である場合、前記第1車両に前記減速制御を実行させるステップと、
を含む、運転支援方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、減速操作が行われた減速位置に車両が到達した場合に車両を自動で減速させる減速制御を実行する運転支援装置及び運転支援方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特許文献1に記載の運転支援装置(以下、「従来装置」と称呼する。)は、運転者の操作の変化と、その操作の変化があったときの位置情報とを関連付けて地図情報を作成する。そして、車両が「操作の変化があったときの位置情報が示す位置」に到着すると、運転者の行った操作の種類に応じて制御ゲインを変更する。例えば、操作の変化が「ブレーキON」である場合、従来装置は、駆動力制御装置の加速ゲインを小さくし、制動制御装置の制動ゲインを大きくする。
【先行技術文献】
【特許文献】
【0003】
特開2009-103570号公報
【発明の概要】
【0004】
従来装置は、運転者が行った減速操作が、今後もその位置を通るたびに行う必要がある減速操作であったのか、一回限りの減速操作であったのか、を判定していない。一回限りの減速操作が行われた位置で、車両が自動で減速するのは好ましくない。一回限りの減速操作を行われた位置を「減速制御を実行する減速位置」として従来装置が学習しないようにするためには、所定数以上の減速操作の履歴が必要となる。このため、車両が新たなルートを走行する場合、そのルートの減速位置の学習が完了するまでにそのルートの何度も走行する必要がある。
【0005】
本発明は前述した課題に対処するためになされたものである。即ち、本発明の目的の一つは、減速位置の学習が完了するまでの時間を短縮できる運転支援装置を提供することにある。
【0006】
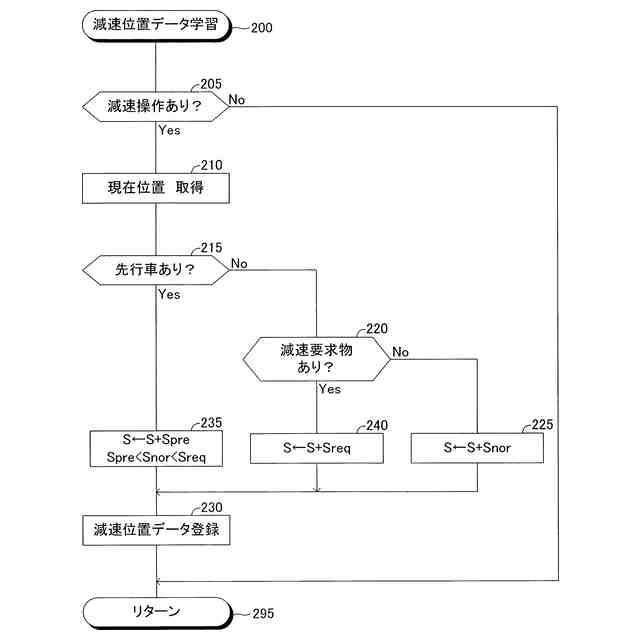
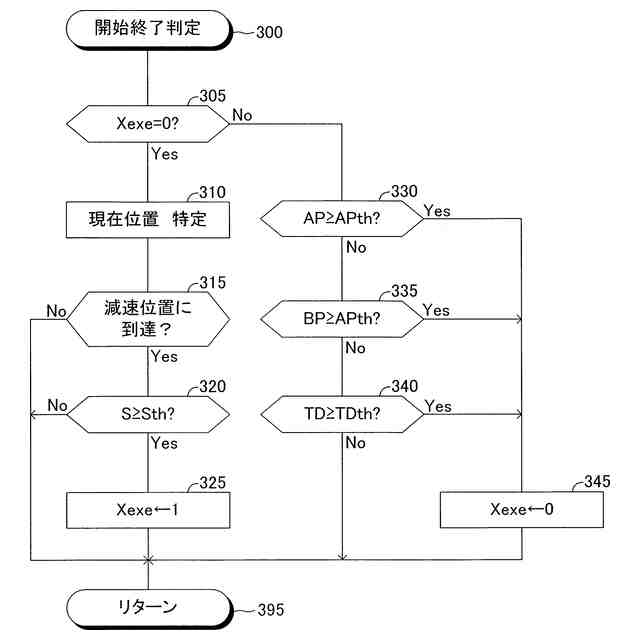
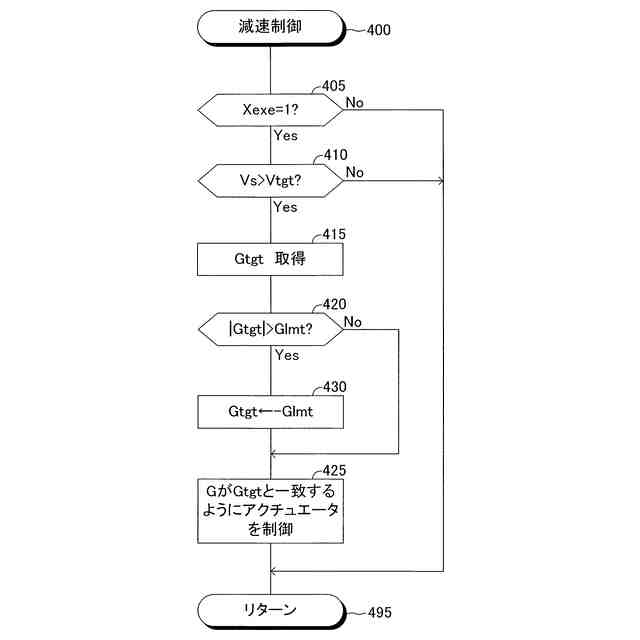
本発明の運転支援装置(以下、「本発明装置」と称呼する。)は、運転者が減速操作を行った減速位置に車両が到達した場合(ステップ315「Yes」)、前記車両を自動で減速させる減速制御を実行する(ステップ425)。
前記運転支援装置は、
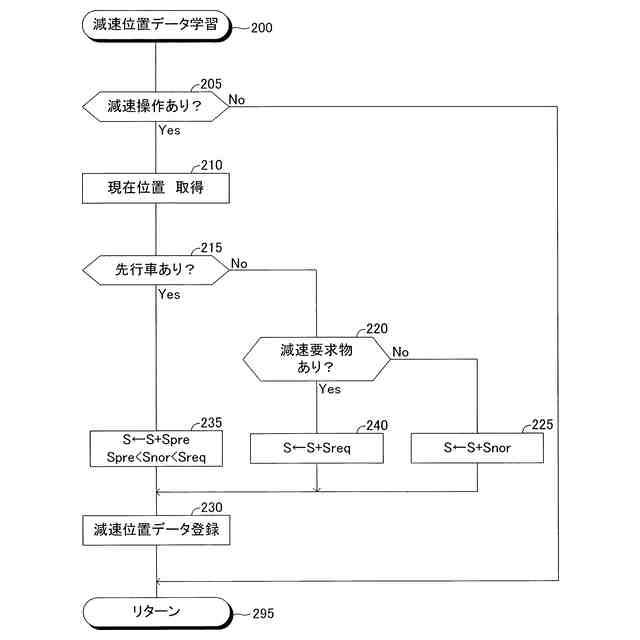
前記運転者が前記減速操作を行ったときの前記車両の前方の環境に基いて、前記減速操作が前記減速位置の前方に設けられ且つ前記車両が減速する必要がある減速要求物に起因して行われたと判定した場合(ステップ220「Yes」)、前記減速操作が前記減速要求物に起因して行われていないと判定した場合よりも大きなスコアを前記減速位置の学習スコアに加算し(ステップ240)、
前記車両が到達した減速位置の学習スコアが閾値以上である場合(ステップ320「Yes」)、前記減速制御を実行する(ステップ425)、ように構成されている。
【0007】
車両の前方に一時停止線、一時停止標識、赤信号及びカーブ路等の減速要求物が存在する場合に減速操作が行われた場合、今後車両がその位置を通過するたびに減速操作が行われる可能性が高い。本発明装置によれば、運転者が減速操作を行ったときの車両の前方の環境に基いて減速操作が減速要求物に起因して行われたと判定した場合、そうでない場合よりも大きなスコアが減速位置の学習スコアに加算される。減速制御は、車両が到達した減速位置の学習スコアが閾値以上である場合に実行される。これにより、一回限りの減速操作が行われた減速位置で誤って減速制御が実行される可能性を低減しつつ、減速位置の学習が完了するまでの時間を短縮できる。
【図面の簡単な説明】
【0008】
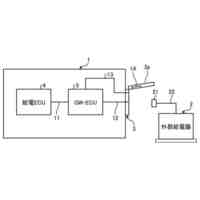
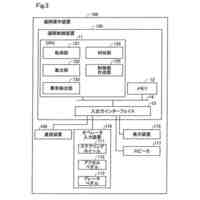
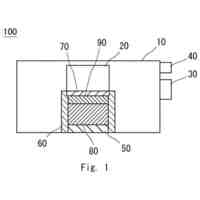
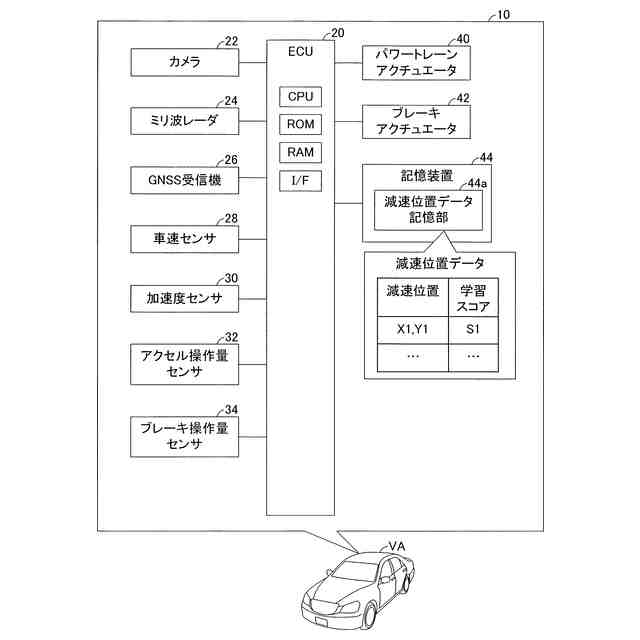
本発明の実施形態に係る運転支援装置の概略システム構成図である。
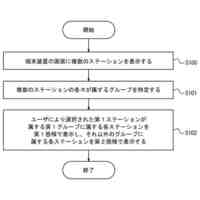
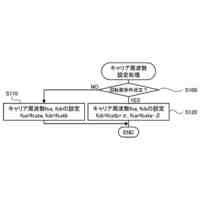
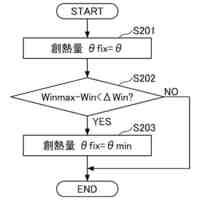
図1に示したECUのCPUが実行する減速位置データ学習ルーチンのフローチャートである。
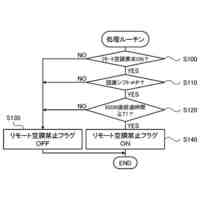
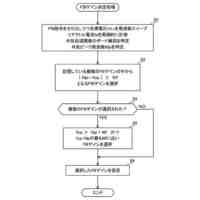
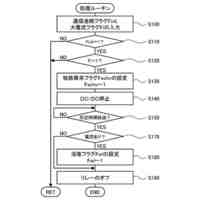
図1に示したECUのCPUが実行する開始終了判定ルーチンのフローチャートである。
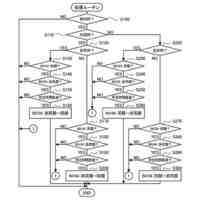
図1に示したECUのCPUが実行する減速制御ルーチンのフローチャートである。
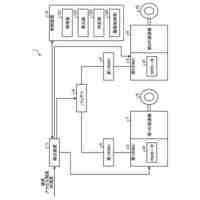
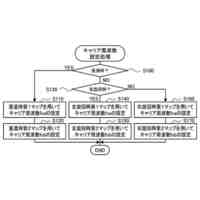
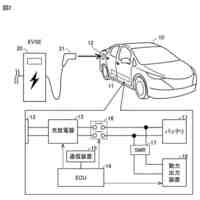
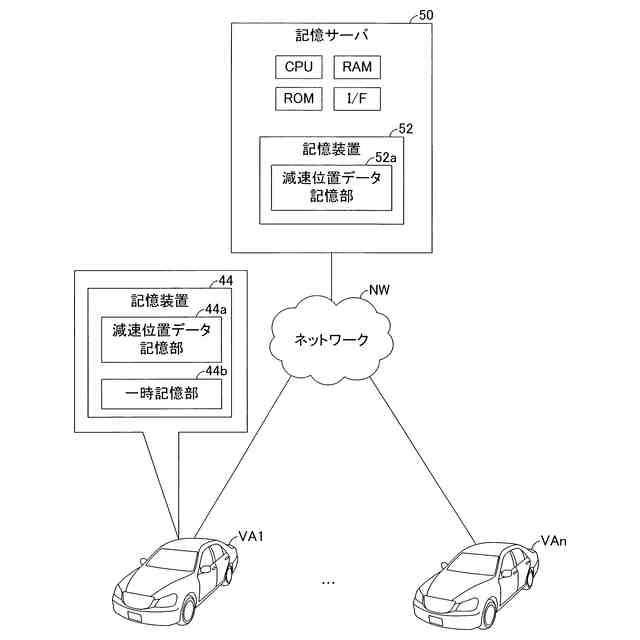
本発明の実施形態の第1変形例に係る運転支援システムの概略システム構成図である。
【発明を実施するための形態】
【0009】
図1に示したように、本実施形態に係る運転支援装置10(以下、「本装置10」と称呼する。)は、車両VAに適用され、図1に示した構成要素を備える。
【0010】
ECU20は自動運転の一種である減速制御を実行する。減速制御では、ECU20は、車両VAを自動で減速させる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
15日前
トヨタ自動車株式会社
方法
1日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
車両
16日前
トヨタ自動車株式会社
方法
4日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
電動車
1日前
トヨタ自動車株式会社
電動車
今日
トヨタ自動車株式会社
電動車
15日前
トヨタ自動車株式会社
電動車
15日前
トヨタ自動車株式会社
組電池
4日前
トヨタ自動車株式会社
ロータ
15日前
トヨタ自動車株式会社
充電器
9日前
トヨタ自動車株式会社
自動車
8日前
トヨタ自動車株式会社
配車装置
今日
トヨタ自動車株式会社
制御装置
15日前
トヨタ自動車株式会社
表示装置
今日
トヨタ自動車株式会社
触媒装置
今日
トヨタ自動車株式会社
駆動装置
15日前
トヨタ自動車株式会社
電動車両
9日前
トヨタ自動車株式会社
制御装置
10日前
トヨタ自動車株式会社
判定装置
10日前
トヨタ自動車株式会社
駆動装置
15日前
トヨタ自動車株式会社
制御装置
8日前
トヨタ自動車株式会社
検査装置
2日前
トヨタ自動車株式会社
二次電池
15日前
トヨタ自動車株式会社
電動車両
15日前
トヨタ自動車株式会社
電動車両
2日前
トヨタ自動車株式会社
電源装置
今日
トヨタ自動車株式会社
二次電池
15日前
トヨタ自動車株式会社
製造方法
9日前
トヨタ自動車株式会社
駆動装置
今日
トヨタ自動車株式会社
蓄電装置
16日前
トヨタ自動車株式会社
接合方法
16日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ