TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025067096
公報種別
公開特許公報(A)
公開日
2025-04-24
出願番号
2023176799
出願日
2023-10-12
発明の名称
点群処理システム、点群処理装置、点群処理方法、及び、プログラム
出願人
日本電気株式会社
代理人
個人
主分類
G01C
21/30 20060101AFI20250417BHJP(測定;試験)
要約
【課題】センシング点群を走行環境点群に対して短時間で位置合わせする技術を提供する。
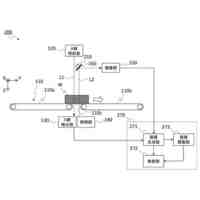
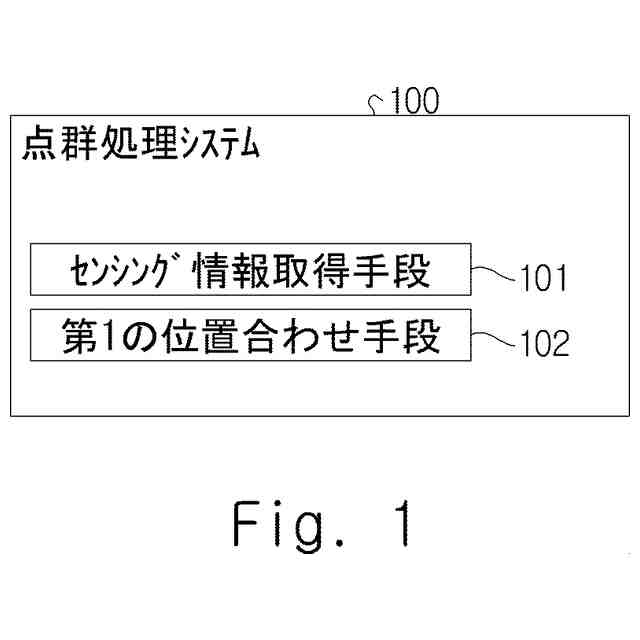
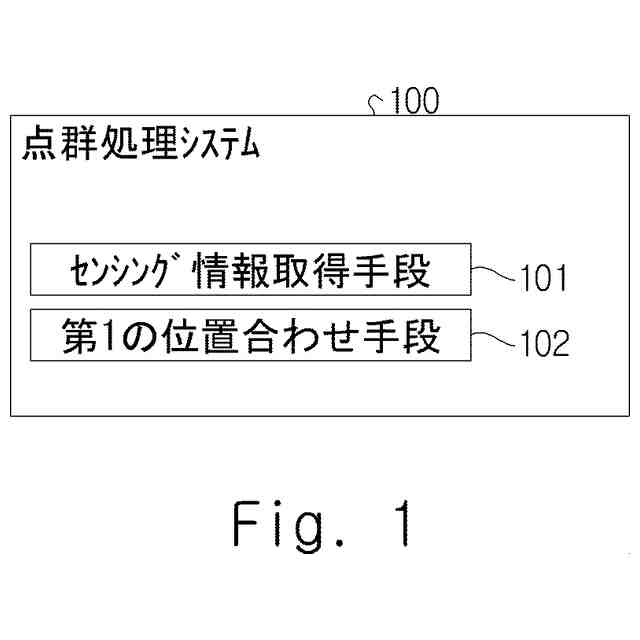
【解決手段】互いに平行に延びる複数の走行軌道のうち何れか1つを走行する移動体に搭載されたセンシング手段が前記移動体の進行方向前方をセンシングすることにより生成したセンシング点群と、前記移動体がセンシングしながら走行した走行軌道を識別する軌道識別情報と、を含むセンシング情報を取得するセンシング情報取得手段と、前記複数の走行軌道を含む走行環境の既知の点群である走行環境点群のうち、前記移動体がセンシングしながら走行した前記走行軌道に対応する走行軌道点群に対して前記センシング点群を位置合わせする第1の位置合わせ手段と、を含む、点群処理システムが提供される。
【選択図】図1
特許請求の範囲
【請求項1】
互いに平行に延びる複数の走行軌道のうち何れか1つを走行する移動体に搭載されたセンシング手段が前記移動体の進行方向前方をセンシングすることにより生成したセンシング点群と、前記移動体がセンシングしながら走行した走行軌道を識別する軌道識別情報と、を含むセンシング情報を取得するセンシング情報取得手段と、
前記複数の走行軌道を含む走行環境の既知の点群である走行環境点群のうち、前記移動体がセンシングしながら走行した前記走行軌道に対応する走行軌道点群に対して前記センシング点群を位置合わせする第1の位置合わせ手段と、
を含む、
点群処理システム。
続きを表示(約 1,200 文字)
【請求項2】
前記走行軌道点群に対して前記センシング点群を位置合わせした位置合わせ結果を初期条件として、前記走行環境点群に対して前記センシング点群を位置合わせする第2の位置合わせ手段を更に含む、
請求項1に記載の点群処理システム。
【請求項3】
前記走行環境点群に対して前記センシング点群を位置合わせした位置合わせ結果と、前記センシング点群と、に基づいて、前記走行環境点群を更新する走行環境点群更新手段を更に含む、
請求項2に記載の点群処理システム。
【請求項4】
前記走行環境点群を記憶する走行環境点群記憶手段を更に含み、
前記走行環境点群記憶手段は、前記走行環境点群を複数の走行軌道点群に分類して記憶する、
請求項1に記載の点群処理システム。
【請求項5】
前記センシング情報取得手段は前記走行環境に配置された情報処理装置に設けられており、
前記情報処理装置は、前記移動体が前記情報処理装置に到達したときに前記移動体が走行してきた区間の前記センシング点群を前記移動体から取得すると共に、前記走行環境点群更新手段が更新した前記走行環境点群に基づく支援情報を前記移動体に提供する、
請求項3に記載の点群処理システム。
【請求項6】
前記支援情報は、前記移動体がこれから走行する区間に対応している、
請求項5に記載の点群処理システム。
【請求項7】
前記移動体は、自動車又は列車である、
請求項1に記載の点群処理システム。
【請求項8】
互いに平行に延びる複数の走行軌道のうち何れか1つを走行する移動体に搭載されたセンシング手段が前記移動体の進行方向前方をセンシングすることにより生成したセンシング点群と、前記移動体がセンシングしながら走行した走行軌道を識別する軌道識別情報と、を含むセンシング情報を取得するセンシング情報取得手段と、
前記複数の走行軌道を含む走行環境の既知の点群である走行環境点群のうち、前記移動体がセンシングしながら走行した前記走行軌道に対応する走行軌道点群に対して前記センシング点群を位置合わせする第1の位置合わせ手段と、
を含む、
点群処理装置。
【請求項9】
互いに平行に延びる複数の走行軌道のうち何れか1つを走行する移動体に搭載されたセンシング手段が前記移動体の進行方向前方をセンシングすることにより生成したセンシング点群と、前記移動体がセンシングしながら走行した走行軌道を識別する軌道識別情報と、を含むセンシング情報を取得し、
前記複数の走行軌道を含む走行環境の既知の点群である走行環境点群のうち、前記移動体がセンシングしながら走行した前記走行軌道に対応する走行軌道点群に対して前記センシング点群を位置合わせする、
点群処理方法。
【請求項10】
コンピュータに、請求項9に記載の点群処理方法を実行させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、点群処理システム、点群処理装置、点群処理方法、及び、プログラムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
特許文献1は、センサを搭載した車両が走行した経路を示す経路情報と、経路を走行時にセンサが収集したセンサ情報と、を識別情報に関連付けて収集する収集部と、収集部が収集した経路情報及びセンサ情報に基づいて、経路情報が示す経路を自律走行機能を有する車両が自律走行するための地図情報を生成する生成部と、生成部が生成した地図情報を識別情報により特定された対象に提供する提供部と、を備えたサーバ装置を開示している。
【先行技術文献】
【特許文献】
【0003】
特開2019-197453号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、自動車や列車の自動運転を実現するには、自動車や列車が移動する移動空間の三次元点群が必要とされる。三次元点群を作成する技術として、SLAM(Simultaneous Localization and Mapping)が知られている。SLAMは、典型的にはLiDAR装置(Light Detection And Ranging)から出力されたLiDAR点群を既知の三次元点群に対して位置合わせ(Registration)することで自己位置推定し、自己位置推定結果及びLiDAR点群に基づいて三次元点群を再構築する技術である。ここで、LiDAR点群を既知の三次元点群に対して位置合わせする技術として、ICP(Iterative Closest Point)やNDT(Normal Distributions Transform)が知られている。これらの位置合わせ技術では、LiDAR点群を既知の三次元点群に対して位置合わせする際のLiDAR点群の既知の三次元点群に対する初期位置の精度に位置合わせの成否が強く依存するという特性がある。即ち、上記初期位置の精度が悪い場合、LiDAR点群を既知の三次元点群に対して位置合わせする位置合わせ演算の収束性が悪く演算時間が長引く傾向にあるし、場合によっては位置合わせ演算が誤った局所解に収束してしまうこともあるだろう。
【0005】
本開示の目的は、センシング点群を走行環境点群に対して短時間で位置合わせする技術を提供することにある。
【課題を解決するための手段】
【0006】
互いに平行に延びる複数の走行軌道のうち何れか1つを走行する移動体に搭載されたセンシング手段が前記移動体の進行方向前方をセンシングすることにより生成したセンシング点群と、前記移動体がセンシングしながら走行した走行軌道を識別する軌道識別情報と、を含むセンシング情報を取得するセンシング情報取得手段と、
前記複数の走行軌道を含む走行環境の既知の点群である走行環境点群のうち、前記移動体がセンシングしながら走行した前記走行軌道に対応する走行軌道点群に対して前記センシング点群を位置合わせする第1の位置合わせ手段と、
を含む、
点群処理システムが提供される。
【0007】
互いに平行に延びる複数の走行軌道のうち何れか1つを走行する移動体に搭載されたセンシング手段が前記移動体の進行方向前方をセンシングすることにより生成したセンシング点群と、前記移動体がセンシングしながら走行した走行軌道を識別する軌道識別情報と、を含むセンシング情報を取得するセンシング情報取得手段と、
前記複数の走行軌道を含む走行環境の既知の点群である走行環境点群のうち、前記移動体がセンシングしながら走行した前記走行軌道に対応する走行軌道点群に対して前記センシング点群を位置合わせする第1の位置合わせ手段と、
を含む、
点群処理装置が提供される。
【0008】
互いに平行に延びる複数の走行軌道のうち何れか1つを走行する移動体に搭載されたセンシング手段が前記移動体の進行方向前方をセンシングすることにより生成したセンシング点群と、前記移動体がセンシングしながら走行した走行軌道を識別する軌道識別情報と、を含むセンシング情報を取得し、
前記複数の走行軌道を含む走行環境の既知の点群である走行環境点群のうち、前記移動体がセンシングしながら走行した前記走行軌道に対応する走行軌道点群に対して前記センシング点群を位置合わせする、
点群処理方法が提供される。
【発明の効果】
【0009】
以上の構成によれば、センシング点群を走行環境点群に対して短時間で位置合わせする技術が実現される。
【図面の簡単な説明】
【0010】
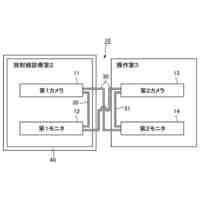
点群処理システムのブロック図である。
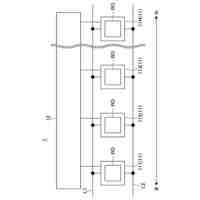
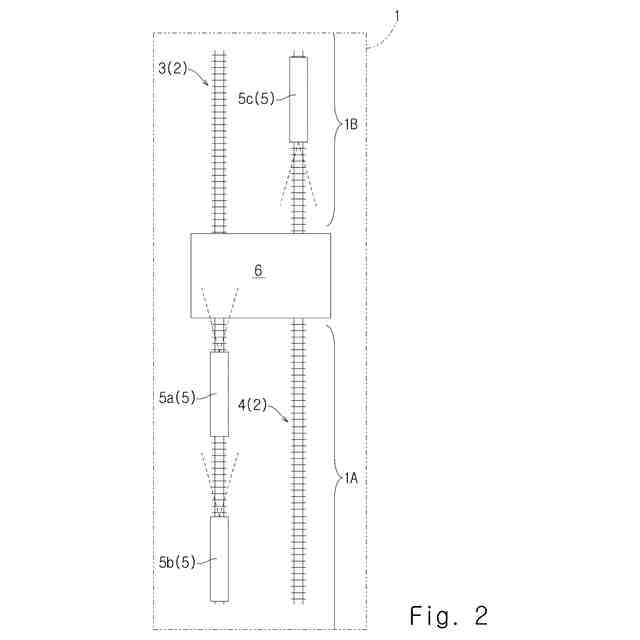
線路環境の平面図である。
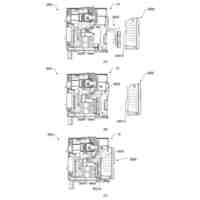
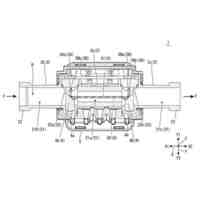
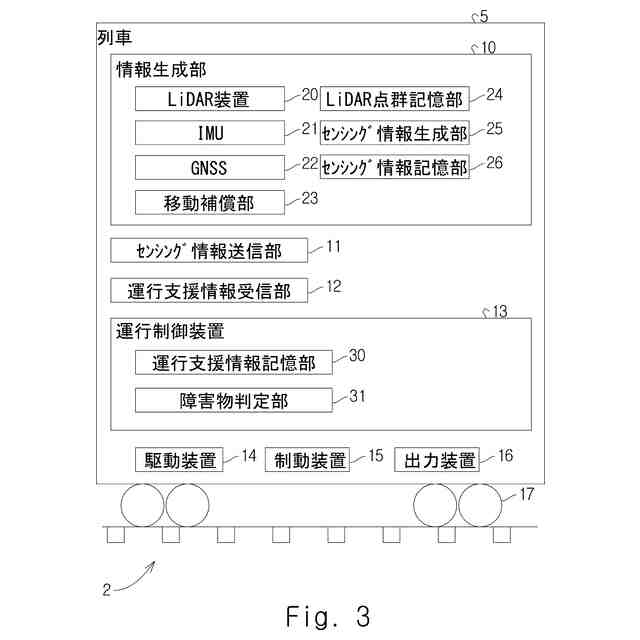
列車のブロック図である。
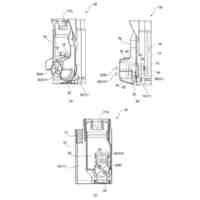
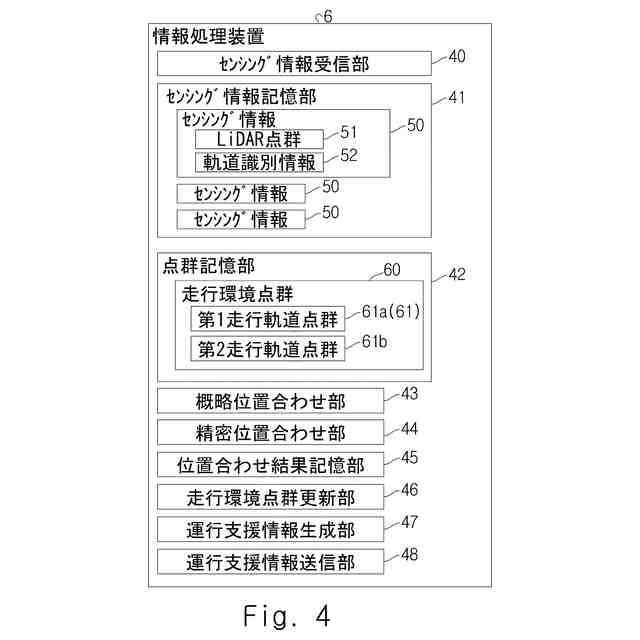
情報処理装置のブロック図である。
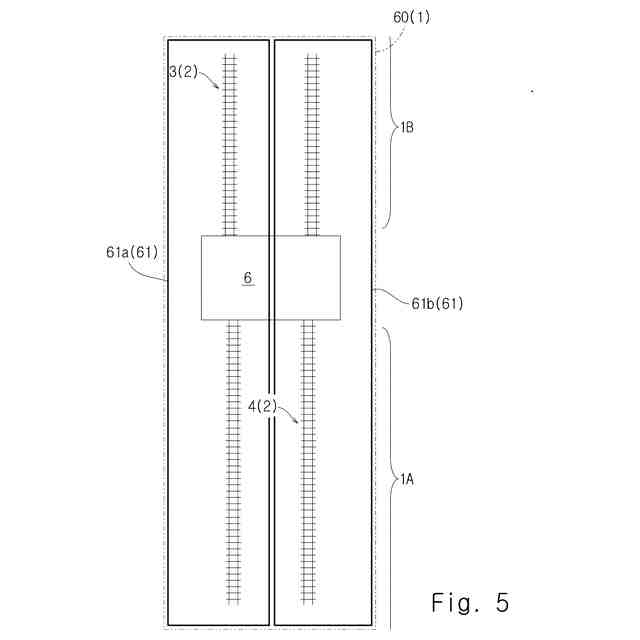
走行環境点群と走行軌道点群の関係を示す平面図である。
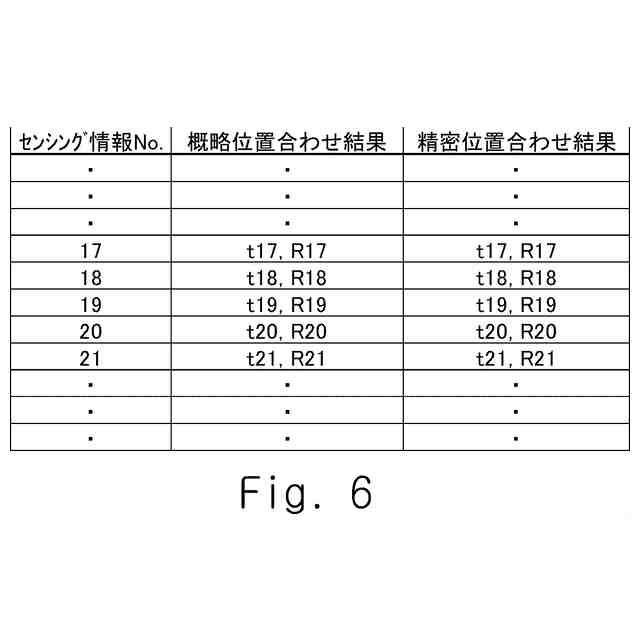
位置合わせ結果記憶部のデータ構造である。
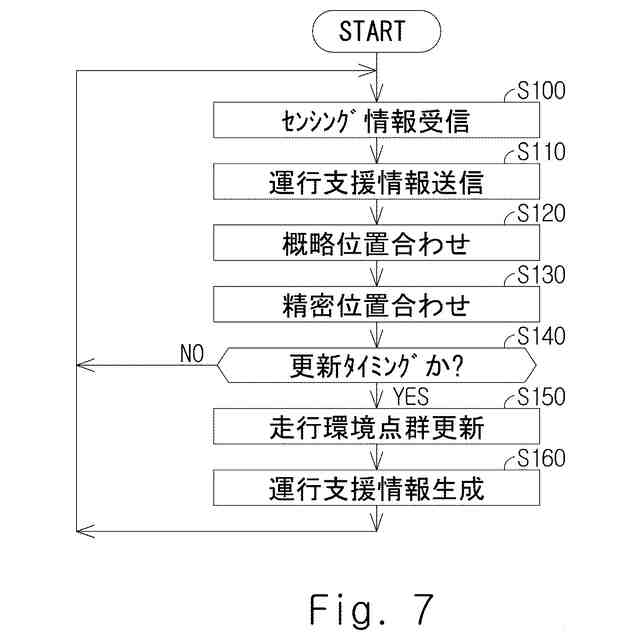
情報処理装置の制御フローである。
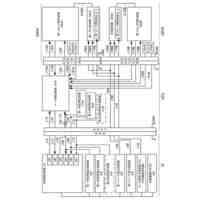
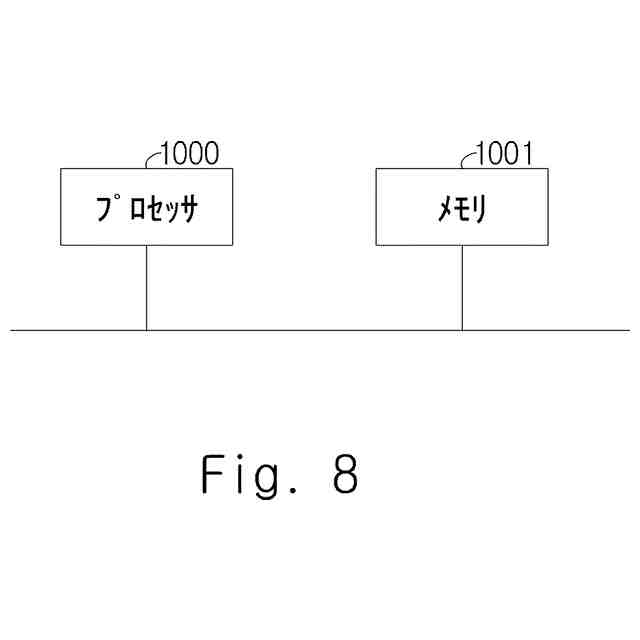
情報処理装置が備える処理回路をプロセッサ及びメモリで構成する場合を示す図である。
情報処理装置が備える処理回路を専用のハードウェアで構成する場合を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
粒子分析装置
2日前
個人
アクセサリー型テスター
3日前
日本精機株式会社
位置検出装置
19日前
株式会社ミツトヨ
画像測定機
4日前
東レ株式会社
シート状物の検査方法
17日前
株式会社テイエルブイ
振動検出装置
2日前
エイブリック株式会社
電流検出回路
16日前
栄進化学株式会社
浸透探傷用濃縮液
9日前
東ソー株式会社
自動分析装置及び方法
19日前
株式会社チノー
放射光測温装置
16日前
ダイハツ工業株式会社
試料セル
2日前
日本特殊陶業株式会社
ガスセンサ
16日前
トヨタ自動車株式会社
電気自動車
3日前
大和製衡株式会社
計量装置
9日前
株式会社 キョーワ
食品搬送装置
16日前
日本特殊陶業株式会社
ガスセンサ
16日前
富士電機株式会社
エンコーダ
17日前
理研計器株式会社
ガス検出器
4日前
大成建設株式会社
画像表示システム
12日前
日本碍子株式会社
ガスセンサ
16日前
理研計器株式会社
ガス検出器
4日前
理研計器株式会社
ガス検出器
4日前
理研計器株式会社
ガス検出器
4日前
株式会社熊谷組
計測システム
9日前
理研計器株式会社
ガス検出器
4日前
株式会社 システムスクエア
検査装置
10日前
株式会社ニコン
検出装置
2日前
株式会社デンソー
試験装置
12日前
東洋計器株式会社
超音波式流量計
9日前
東洋計器株式会社
超音波式流量計
9日前
東洋計器株式会社
超音波式流量計
9日前
株式会社ヨコオ
シートコンタクタ
19日前
TDK株式会社
温度センサ
17日前
株式会社豊田自動織機
電流検出装置
2日前
オムロン株式会社
光電センサ
16日前
シチズンファインデバイス株式会社
圧力検出装置
16日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ