TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025065281
公報種別
公開特許公報(A)
公開日
2025-04-17
出願番号
2025017226,2023116288
出願日
2025-02-05,2012-07-26
発明の名称
画像処理装置、画像処理方法および画像処理プログラム
出願人
パイオニア株式会社
代理人
弁理士法人酒井総合特許事務所
主分類
G01C
21/36 20060101AFI20250410BHJP(測定;試験)
要約
【課題】画像の膨張収縮処理を実行しなくても、移動体の到達可能範囲を、欠損点を発生することなく表現できること。
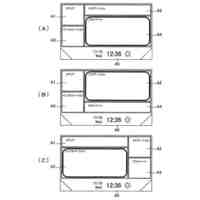
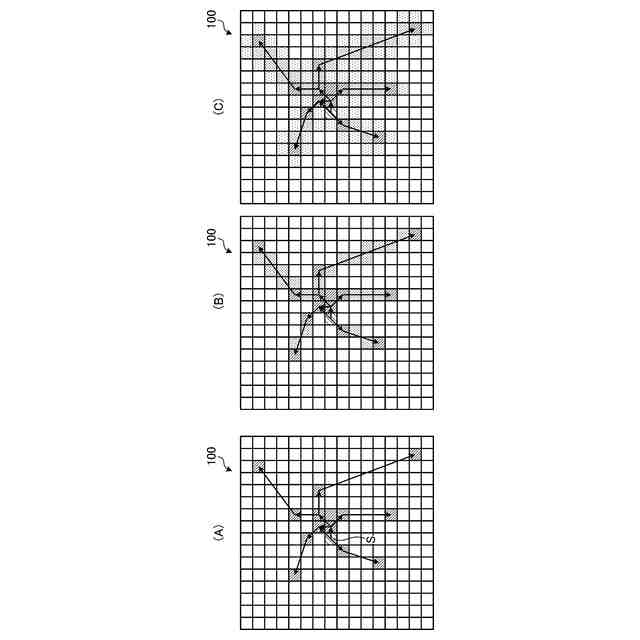
【解決手段】地図情報100として、(A)は、探索後の状態を示している。(A)では、矢印の始端が探索元地点に対応し、矢印の終端が探索先地点に対応する。探索元地点が存在するメッシュが探索元領域であり、探索先領域が存在するメッシュが探索先領域である。(B)は、(A)の次状態を示している。(B)では、探索元領域と探索先領域との間のメッシュであって、探索されたリンクが存在するメッシュが塗りつぶされている。(C)は、(B)の次状態を示している。(C)では、(A)および(B)で塗りつぶされた各メッシュの上下4メッシュが塗りつぶされている。(C)における塗りつぶされた領域群が、移動体の到達可能範囲となる。
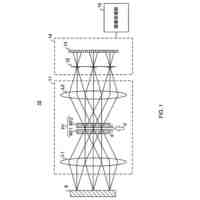
【選択図】図1
特許請求の範囲
【請求項1】
移動体の現在地点に関する情報、および、前記移動体の現在地点において前記移動体が保有するエネルギー量である初期保有エネルギー量に関する情報、を取得する取得手段と、
前記移動体が所定区間を走行する際に消費するエネルギーである推定エネルギー消費量を算出する算出手段と、
地点を示すノード群と地点間の経路を示すリンク群を含む地図情報、前記初期保有エネルギー量および前記推定エネルギー消費量に基づいて、前記移動体が現在地点から当該現在地点が位置するリンクに沿って到達可能な地点を探索するとともに、探索された地点から当該地点が示すノードに接続されるリンクに沿って到達可能な地点を探索する探索処理を実行することにより、前記探索処理における探索元地点と当該探索元地点からの探索先地点との組み合わせを保存する探索手段と、
前記地図情報を複数の領域に分割する分割手段と、
前記探索手段によって探索された組み合わせごとに、前記複数の領域のうち、前記探索元地点を含む探索元領域と前記探索先地点を含む探索先領域との間に存在し、かつ、前記探索元地点と前記探索先地点とを結ぶリンクに重複する重複領域に対し、前記移動体が到達可能であることを示す識別情報を付与するとともに、前記探索元領域および前記探索先領域に対し前記識別情報を付与する付与手段と、
前記付与手段によって付与された識別情報群に基づいて、前記移動体の到達可能範囲を表示手段に表示させる表示制御手段と、
を備えることを特徴とする画像処理装置。
発明の詳細な説明
【技術分野】
【0001】
この発明は、移動体の残存エネルギー量に基づいて移動体の到達可能範囲を生成する画像処理装置、画像処理方法および画像処理プログラムに関する。ただし、この発明の利用は、画像処理装置、画像処理方法および画像処理プログラムに限らない。
続きを表示(約 3,700 文字)
【背景技術】
【0002】
従来、移動体の現在地点に基づいて、移動体の到達可能範囲を生成する処理装置が知られている(例えば、下記特許文献1参照。)。下記特許文献1では、移動体の現在地点を中心に地図上の全方位を放射状に分割し、分割領域ごとに移動体の現在地点から最も遠い到達可能な交差点を地図情報のノードとして取得する。そして、取得した複数のノードを結んで得られるベジュ曲線を移動体の到達可能範囲として表示している。
【0003】
また、移動体のバッテリー残容量および電力消費量に基づいて、各道路における移動体の現在地点からの到達可能範囲を生成する処理装置が知られている(例えば、下記特許文献2参照。)。下記特許文献2では、移動体の現在地点に接続する複数の道路において移動体の電力消費量を算出し、移動体のバッテリー残容量および電力消費量に基づいて各道路における移動体の走行可能距離を算出する。そして、移動体の現在地点と、当該現在地点から走行可能距離だけ離れた移動体の複数の到達可能地点とを地図情報のノードとして取得し、複数のノードを結んで得られる線分の集合体を移動体の到達可能範囲として表示している。
【先行技術文献】
【特許文献】
【0004】
特開平11-016094号公報
特開平07-085397号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述した特許文献1の技術では、移動体の現在地点を中心に各方位における移動体から最も遠い到達地点のみを取得しているので、移動体の到達可能範囲の輪郭しか得られない。このため、移動体の現在地点と移動体から最も遠い到達地点との間に、海や湖など移動体が走行することのできない領域が含まれていたとしても、この移動体が走行することのできない領域を除外して移動体の到達可能範囲を取得することができないという問題点が一例として挙げられる。
【0006】
また、上述した特許文献2の技術では、移動体の到達可能範囲として道路のみを取得しているので、道路以外の範囲を移動体の到達可能範囲に含めることができない。また、移動体の到達可能範囲が移動体の走行可能な道路に沿った線分の集合体で表示されるので、到達可能範囲の輪郭を取得することができない。このため、移動体の到達可能範囲を見やすく、かつ漏れなく表示することが困難であるという問題点が一例として挙げられる。
【課題を解決するための手段】
【0007】
上述した課題を解決し、目的を達成するため、請求項1の発明にかかる画像処理装置は、移動体が保有するエネルギー量に関する情報、および前記移動体が走行する際に消費するエネルギーである推定エネルギー消費量に基づいて、到達可能な地点を探索する探索手段と、前記探索手段の探索処理における探索元地点を含む探索元領域と当該探索元地点からの探索先地点を含む探索先領域に対し、膨張収縮処理を実行して得られる第1領域と、
前記探索元領域、前記探索先領域、並びに前記探索元領域および前記探索先領域を結ぶリンクに重複する重複領域に基づき得られる第2領域との合成領域を到達可能範囲として表示手段に表示させる表示制御手段を備えることを特徴とする。
【0008】
また、請求項2の発明にかかる画像処理方法は、画像処理装置が実行する画像処理方法において、移動体が保有するエネルギー量に関する情報、および前記移動体が走行する際に消費するエネルギーである推定エネルギー消費量に基づいて、到達可能な地点を探索手段により探索する探索工程と、前記探索工程の処理における探索元地点を含む探索元領域と当該探索元地点からの探索先地点を含む探索先領域に対し、膨張収縮処理を実行して得られる第1領域と、前記探索元領域、前記探索先領域、並びに前記探索元領域および前記探索先領域を結ぶリンクに重複する重複領域に基づき得られる第2領域との合成領域を到達可能範囲として表示手段に表示させる表示制御手段が行う表示制御工程と、を含むことを特徴とする。
【0009】
また、請求項3の発明にかかる画像処理プログラムは、請求項2に記載の画像処理方法をコンピュータに実行させることを特徴とする。
【図面の簡単な説明】
【0010】
図1は、本実施の形態にかかる画像処理装置および画像処理方法による画像処理例を示す説明図である。
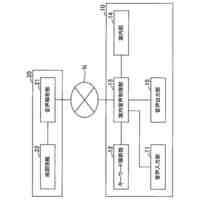
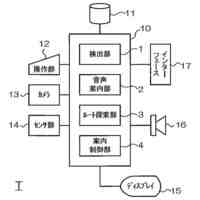
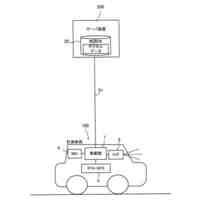
図2は、ナビゲーション装置のハードウェア構成を示すブロック図である。
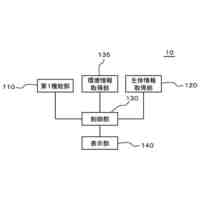
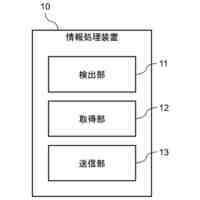
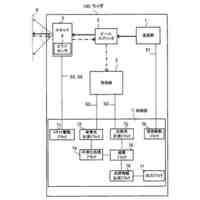
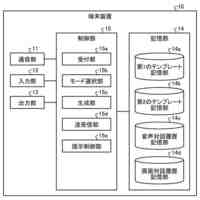
図3は、画像処理装置の機能的構成例を示すブロック図である。
図4は、ナビゲーション装置200による到達可能地点探索の一例について模式的に示す説明図(その1)である。
図5は、ナビゲーション装置200による到達可能地点探索の一例について模式的に示す説明図(その2)である。
図6は、ナビゲーション装置200による到達可能地点探索の一例について模式的に示す説明図(その3)である。
図7は、ナビゲーション装置200による到達可能地点探索の一例について模式的に示す説明図(その4)である。
図8は、ナビゲーション装置200による到達可能地点探索の一例について示す説明図である。
図9は、ナビゲーション装置200による到達可能地点探索の別の一例について示す説明図である。
図10は、ナビゲーション装置200による到達可能地点を経度-緯度で示す一例の説明図である。
図11は、ナビゲーション装置200による到達可能地点をメッシュで示す一例の説明図である。
図12は、付与部305による識別情報の付与例1を示す説明図である。
図13は、付与部305による識別情報の付与例2を示す説明図である。
図14は、検出部307による方向検出例を示す説明図である。
図15は、ナビゲーション装置による車両の到達可能範囲抽出の一例を模式的に示す説明図である。
図16は、ナビゲーション装置による車両の到達可能範囲抽出後のメッシュの一例を模式的に示す説明図である。
図17は、ナビゲーション装置による車両の到達可能範囲抽出の別の一例について模式的に示す説明図である。
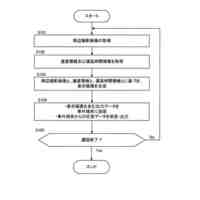
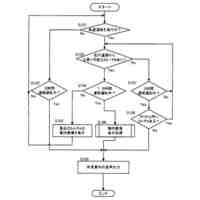
図18は、ナビゲーション装置による画像処理の手順の一例を示すフローチャートである。
図19は、図18に示した推定エネルギー消費量算出処理(ステップS1802)の詳細な処理手順例を示すフローチャートである。
図20は、ナビゲーション装置による到達可能地点探索処理の手順を示すフローチャート(その1)である。
図21は、ナビゲーション装置による到達可能地点探索処理の手順を示すフローチャート(その2)である。
図22は、図20に示したリンク候補判断処理(ステップS2007)の手順の一例を示すフローチャートである。
図23は、図18に示したメッシュ生成処理(ステップS1804)の手順の一例を示すフローチャートである。
図24は、図18に示した連結処理(ステップS1805)の手順の一例を示すフローチャートである。
図25は、図18に示した識別情報変更処理(ステップS1806)の手順の一例を示すフローチャートである。
図26は、図18に示した表示処理(ステップS1807)の手順の一例を示すフローチャート(その1)である。
図27は、図18に示した表示処理(ステップS1807)の手順の一例を示すフローチャート(その2)である。
図28は、図18に示した連結処理(ステップS1805)の手順の他の例を示すフローチャートである。
図29は、勾配がある道路を走行する車両にかかる加速度の一例を模式的に示した説明図である。
図30は、実施の形態2にかかる画像処理装置300および画像処理方法による画像処理例を示す説明図である。
図31は、ナビゲーション装置によるクロージング処理の一例を示す説明図である。
図32は、ナビゲーション装置によるクロージング処理の一例を模式的に示す説明図である。
図33は、ナビゲーション装置によるオープニング処理の一例を示す説明図である。
図34は、ナビゲーション装置による画像処理の手順の一例を示すフローチャートである。
図35は、連結判定例を示す説明図である。
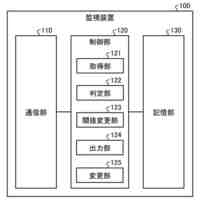
図36は、実施の形態3にかかる画像処理装置の機能的構成の一例を示すブロック図である。
図37は、実施の形態3にかかる画像処理システムの機能的構成の他の例を示すブロック図である。
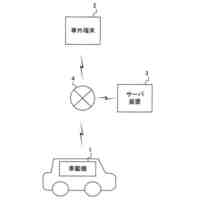
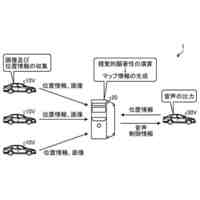
図38は、実施の形態4のシステム構成の一例を示す説明図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
パイオニア株式会社
情報処理装置及び生成装置
18日前
パイオニア株式会社
監視装置、監視方法および監視プログラム
25日前
パイオニア株式会社
監視装置、監視方法および監視プログラム
20日前
パイオニア株式会社
情報処理装置、制御方法、プログラム及び記憶媒体
3日前
パイオニア株式会社
情報処理装置、制御方法、プログラム及び記憶媒体
3日前
パイオニア株式会社
情報処理装置、制御方法、プログラム及び記憶媒体
3日前
パイオニア株式会社
情報処理装置、制御方法、プログラム及び記憶媒体
3日前
パイオニア株式会社
車両
16日前
パイオニア株式会社
発光装置
17日前
パイオニア株式会社
案内装置
16日前
パイオニア株式会社
携帯機器
16日前
パイオニア株式会社
駆動装置
17日前
パイオニア株式会社
表示装置
17日前
パイオニア株式会社
センサ装置
12日前
パイオニア株式会社
情報処理装置、情報処理方法、および、情報処理プログラム
17日前
パイオニア株式会社
車両制御装置
16日前
パイオニア株式会社
音声制御装置
3日前
パイオニア株式会社
情報提供装置
5日前
パイオニア株式会社
情報処理装置
16日前
東北パイオニア株式会社
スピーカ装置
4日前
パイオニア株式会社
光偏向モジュール
1か月前
パイオニア株式会社
振動板、スピーカ装置
5日前
パイオニア株式会社
受信装置及び受信処理方法
3日前
パイオニア株式会社
案内装置、案内方法及び案内用プログラム
10日前
パイオニア株式会社
波長選択素子及び波長選択素子の製造方法
16日前
パイオニア株式会社
光制御装置、光制御方法、及び、プログラム
16日前
パイオニア株式会社
計測装置、制御方法、プログラム及び記憶媒体
10日前
パイオニア株式会社
制御装置、制御方法、プログラム及び記憶媒体
16日前
パイオニア株式会社
分光カメラ、撮像方法、プログラム及び記録媒体
1か月前
パイオニア株式会社
地図作成装置、制御方法、プログラム及び記憶媒体
10日前
パイオニア株式会社
表示制御装置、制御方法、プログラム、及び記憶媒体
10日前
パイオニア株式会社
情報処理装置、管理装置、端末装置及び情報処理方法
16日前
パイオニア株式会社
情報提供装置、制御方法、プログラム、及び記憶媒体
10日前
パイオニア株式会社
画像処理装置、画像処理方法および画像処理プログラム
10日前
パイオニア株式会社
画像処理装置、画像処理方法および画像処理プログラム
10日前
パイオニア株式会社
ドライバ推定装置、制御方法、プログラム及び記憶媒体
17日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ