TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025062048
公報種別
公開特許公報(A)
公開日
2025-04-11
出願番号
2025016520,2023187398
出願日
2025-02-04,2015-10-06
発明の名称
光制御装置、光制御方法、及び、プログラム
出願人
パイオニア株式会社
代理人
個人
主分類
G01S
17/89 20200101AFI20250404BHJP(測定;試験)
要約
【課題】単一の送受信器を用いて3次元の情報を取得することを可能とする光制御装置を提供する。
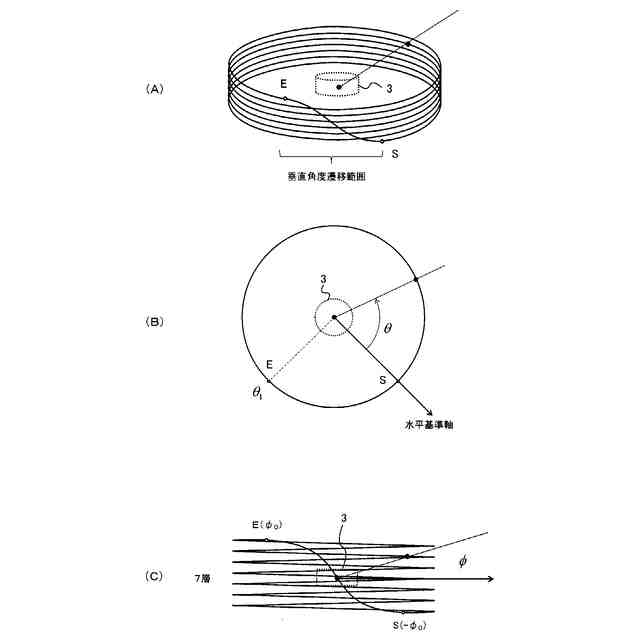
【解決手段】光制御装置は、移動体に設置され、出射部と受光部とを有する送受光部を備える。出射部は光を出射し、受光部は移動体周辺の対象物にて反射された光を受光する。制御部は、出射部によって出射される光を、第1の方向と、第1の方向と交わる第2の方向とに連続的に遷移させることで、出射部によって出射される光の遷移軌跡が螺旋状となるように出射部を制御する。
【選択図】図5
特許請求の範囲
【請求項1】
移動体に設置され、光を出射する出射部と前記光を受光する受光部とを備える送受光部と、
前記出射部からの前記光の出射角度を、第1の方向の全方位及び前記第1の方向と交わる第2の方向に遷移させる制御を行う制御部と、
を備え、
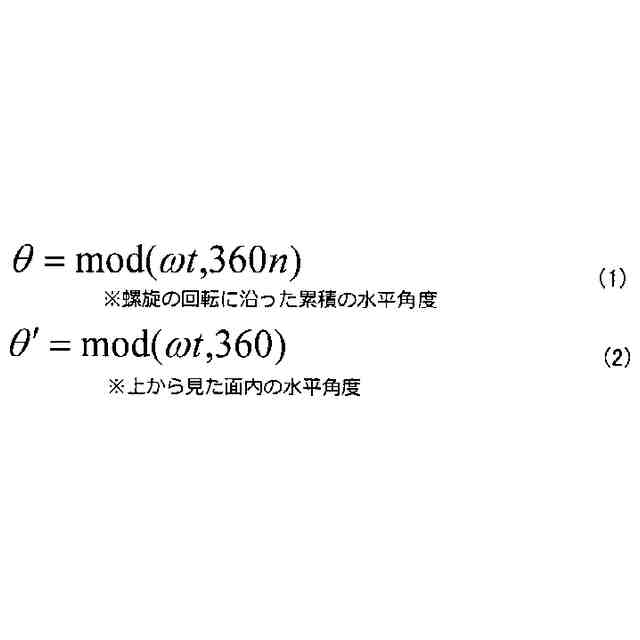
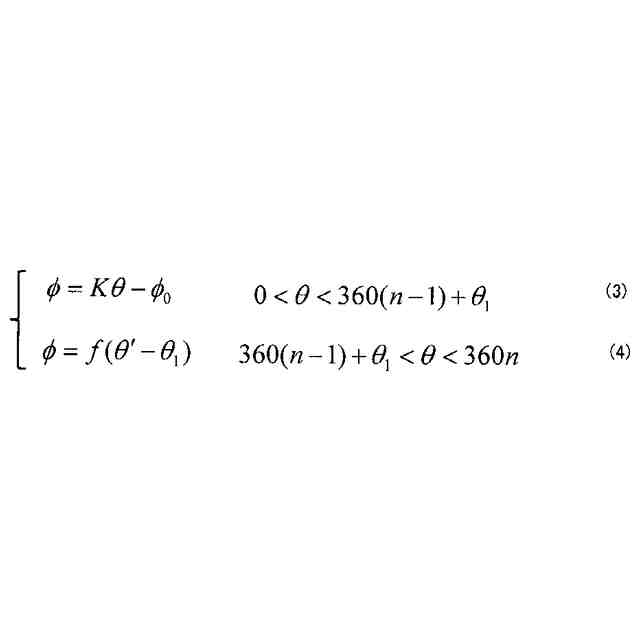
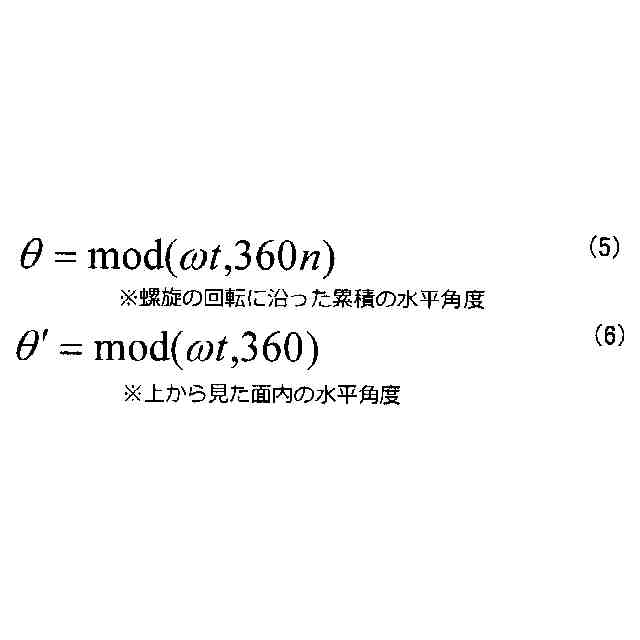
前記制御部は、前記第1の方向における前記出射部からの前記光の出射角度が所定の角度範囲内において、前記光を前記第1の方向に連続的に遷移させつつ、前記第2の方向における前記出射部からの前記光の出射角度を所定角度分だけ遷移させ、前記第1の方向における前記光の出射角度が前記所定の角度範囲外において、前記光を前記第1の方向に連続的に遷移させ、前記第2の方向における前記出射部からの前記光の出射角度を遷移させないことを特徴とする光制御装置。
続きを表示(約 1,100 文字)
【請求項2】
移動体に設置され、光を出射する出射部と前記移動体周辺の対象物にて反射された光を受光する受光部とを有する送受光部を備える光制御装置により実行される光制御方法であって、
前記出射部からの前記光の出射角度を、第1の方向の全方位及び前記第1の方向と交わる第2の方向に遷移させる制御を行う制御工程を有し、
前記制御工程は、前記第1の方向における前記出射部からの前記光の出射角度が所定の角度範囲内において、前記光を前記第1の方向に連続的に遷移させつつ、前記第2の方向における前記出射部からの前記光の出射角度を所定角度分だけ遷移させ、前記第1の方向における前記光の出射角度が前記所定の角度範囲外において、前記光を前記第1の方向に連続的に遷移させ、前記第2の方向における前記出射部からの前記光の出射角度を遷移させないことを特徴とする光制御方法。
【請求項3】
移動体に設置され、光を出射する出射部と前記移動体周辺の対象物にて反射された光を受光する受光部とを有する送受光部と、コンピュータとを備える光制御装置により実行されるプログラムであって、
前記出射部からの前記光の出射角度を、第1の方向の全方位及び前記第1の方向と交わる第2の方向に遷移させる制御を行う制御部として前記コンピュータを機能させ、
前記制御部は、前記第1の方向における前記出射部からの前記光の出射角度が所定の角度範囲内において、前記光を前記第1の方向に連続的に遷移させつつ、前記第2の方向における前記出射部からの前記光の出射角度を所定角度分だけ遷移させ、前記第1の方向における前記光の出射角度が前記所定の角度範囲外において、前記光を前記第1の方向に連続的に遷移させ、前記第2の方向における前記出射部からの前記光の出射角度を遷移させないことを特徴とするプログラム。
【請求項4】
移動体に設置され、光を出射する出射部と前記光を受光する受光部とを備える送受光部と、
出射された前記光を走査させる走査部と、
前記走査部の駆動角度を、第1の方向の全方位及び前記第1の方向と交わる第2の方向に遷移させる制御を行う制御部と、
を備え、
前記制御部は、前記走査部による前記第1の方向における前記光の出射角度が所定の角度範囲内において、前記光を前記第1の方向に連続的に遷移させつつ、前記走査部による前記第2の方向における前記光の出射角度を所定角度分だけ遷移させ、前記第1の方向における前記光の出射角度が前記所定の角度範囲外において、前記光を前記第1の方向に連続的に遷移させ、前記第2の方向における前記出射部からの前記光の出射角度を遷移させないことを特徴とする光制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、出射光の遷移を制御する光制御装置に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
レーザ光を間欠的に発光させつつ水平方向を走査し、その反射光を受信することで物体表面の点群を検出するライダ(LIDAR)が知られている。特許文献1は、自動車に搭載したライダにより1次元又は2次元で周囲を走査し、自動車の周囲の状況についての情報を検出する手法を記載している。
【先行技術文献】
【特許文献】
【0003】
特開2014-89691号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
周囲の状況についての情報を3次元で取得したい場合、多層型のライダを使用する必要がある。しかし、多層型のライダは層数分の光送受信器を必要とするため、非常に高コストとなる。
【0005】
本発明が解決しようとする課題としては、上記のものが例として挙げられる。本発明は、単一の送受信器を用いて3次元の情報を取得することを可能とする光制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
請求項1に記載の発明は、光制御装置であって、移動体に設置され、光を出射する出射部と前記光を受光する受光部とを備える送受光部と、前記出射部からの前記光の出射角度を、第1の方向の全方位及び前記第1の方向と交わる第2の方向に遷移させる制御を行う制御部と、を備え、前記制御部は、前記第1の方向における前記出射部からの前記光の出射角度が所定の角度範囲内において、前記光を前記第1の方向に連続的に遷移させつつ、前記第2の方向における前記出射部からの前記光の出射角度を所定角度分だけ遷移させ、前記第1の方向における前記光の出射角度が前記所定の角度範囲外において、前記光を前記第1の方向に連続的に遷移させ、前記第2の方向における前記出射部からの前記光の出射角度を遷移させないことを特徴とする。
【0007】
請求項2に記載の発明は、移動体に設置され、光を出射する出射部と前記移動体周辺の対象物にて反射された光を受光する受光部とを有する送受光部を備える光制御装置により実行される光制御方法であって、前記出射部からの前記光の出射角度を、第1の方向の全方位及び前記第1の方向と交わる第2の方向に遷移させる制御を行う制御工程を有し、前記制御工程は、前記第1の方向における前記出射部からの前記光の出射角度が所定の角度範囲内において、前記光を前記第1の方向に連続的に遷移させつつ、前記第2の方向における前記出射部からの前記光の出射角度を所定角度分だけ遷移させ、前記第1の方向における前記光の出射角度が前記所定の角度範囲外において、前記光を前記第1の方向に連続的に遷移させ、前記第2の方向における前記出射部からの前記光の出射角度を遷移させないことを特徴とする。
【0008】
請求項3に記載の発明は、移動体に設置され、光を出射する出射部と前記移動体周辺の対象物にて反射された光を受光する受光部とを有する送受光部と、コンピュータとを備える光制御装置により実行されるプログラムであって、前記出射部からの前記光の出射角度を、第1の方向の全方位及び前記第1の方向と交わる第2の方向に遷移させる制御を行う制御部として前記コンピュータを機能させ、前記制御部は、前記第1の方向における前記出射部からの前記光の出射角度が所定の角度範囲内において、前記光を前記第1の方向に連続的に遷移させつつ、前記第2の方向における前記出射部からの前記光の出射角度を所定角度分だけ遷移させ、前記第1の方向における前記光の出射角度が前記所定の角度範囲外において、前記光を前記第1の方向に連続的に遷移させ、前記第2の方向における前記出射部からの前記光の出射角度を遷移させないことを特徴とする。
【0009】
請求項4に記載の発明は、光制御装置であって、移動体に設置され、光を出射する出射部と前記光を受光する受光部とを備える送受光部と、出射された前記光を走査させる走査部と、前記走査部の駆動角度を、第1の方向の全方位及び前記第1の方向と交わる第2の方向に遷移させる制御を行う制御部と、を備え、前記制御部は、前記走査部による前記第1の方向における前記光の出射角度が所定の角度範囲内において、前記光を前記第1の方向に連続的に遷移させつつ、前記走査部による前記第2の方向における前記光の出射角度を所定角度分だけ遷移させ、前記第1の方向における前記光の出射角度が前記所定の角度範囲外において、前記光を前記第1の方向に連続的に遷移させ、前記第2の方向における前記出射部からの前記光の出射角度を遷移させないことを特徴とする。
【図面の簡単な説明】
【0010】
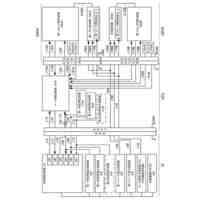
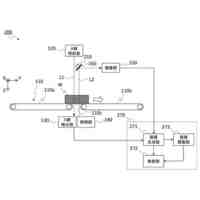
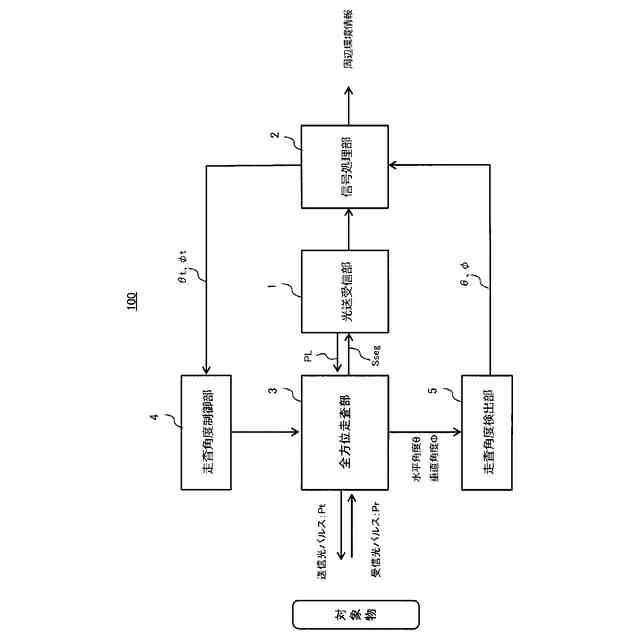
実施例に係るライダユニットの構成を示すブロック図である。
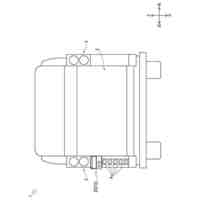
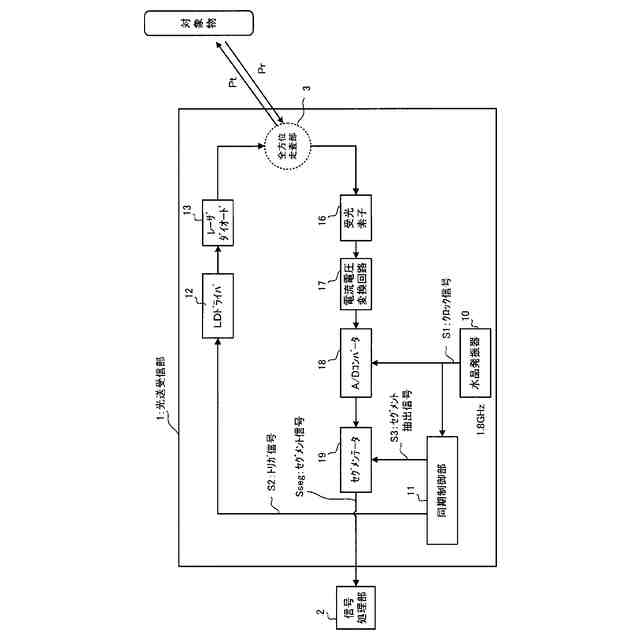
光送受信部の構成を示すブロック図である。
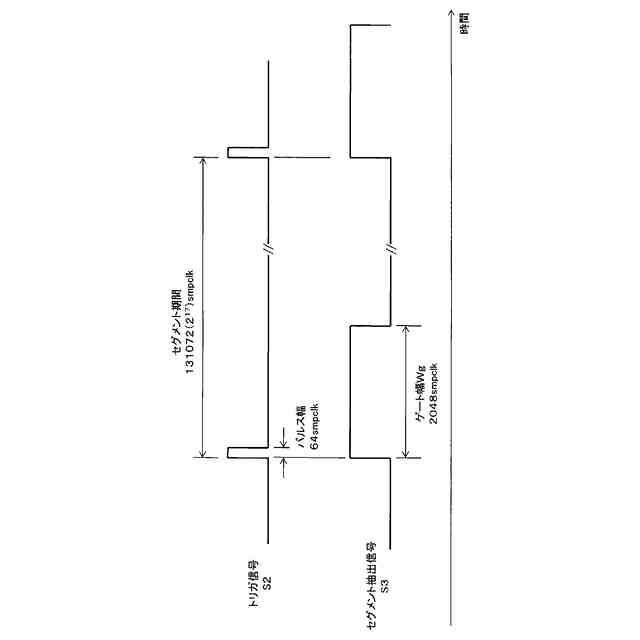
トリガ信号及びセグメント抽出信号の波形を示す。
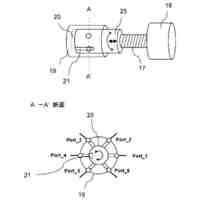
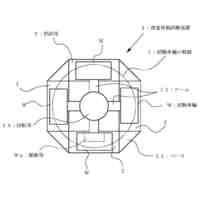
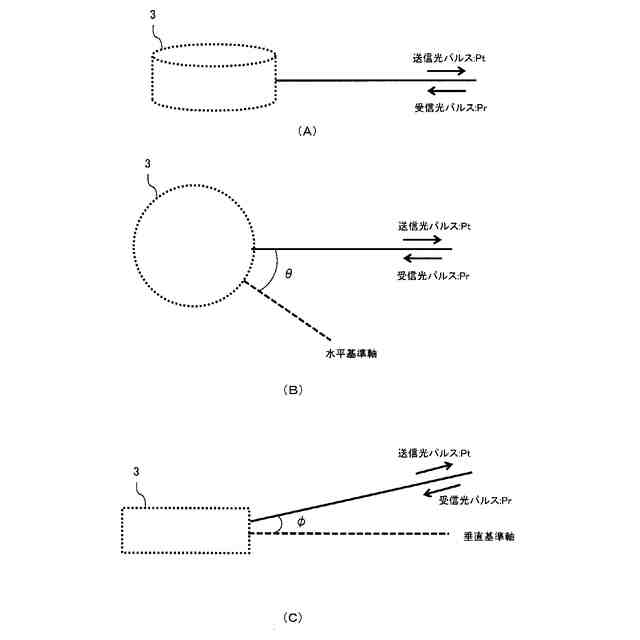
全方位走査部の動作を模式的に示す。
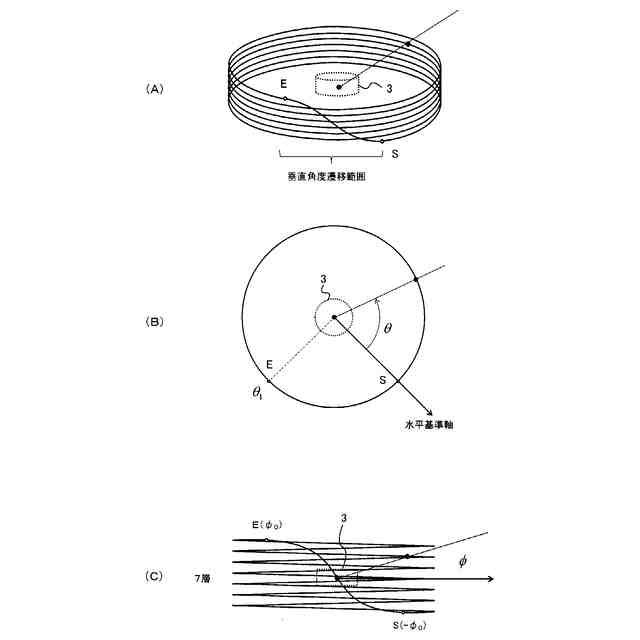
第1実施例による螺旋走査の軌跡を示す。
第1実施例の螺旋走査による走査視野を示す。
第2実施例による部分多層走査の軌跡を示す。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
粒子分析装置
13日前
株式会社イシダ
計量装置
7日前
個人
アクセサリー型テスター
14日前
日本精機株式会社
位置検出装置
1か月前
株式会社ミツトヨ
画像測定機
15日前
エイブリック株式会社
電流検出回路
27日前
栄進化学株式会社
浸透探傷用濃縮液
20日前
株式会社テイエルブイ
振動検出装置
13日前
東レ株式会社
シート状物の検査方法
28日前
株式会社チノー
放射光測温装置
27日前
ダイハツ工業株式会社
試料セル
13日前
東ソー株式会社
自動分析装置及び方法
1か月前
トヨタ自動車株式会社
検査装置
7日前
トヨタ自動車株式会社
電気自動車
14日前
大和製衡株式会社
計量装置
20日前
日本特殊陶業株式会社
ガスセンサ
27日前
日本特殊陶業株式会社
ガスセンサ
27日前
株式会社 キョーワ
食品搬送装置
27日前
日本碍子株式会社
ガスセンサ
27日前
理研計器株式会社
ガス検出器
15日前
理研計器株式会社
ガス検出器
15日前
大成建設株式会社
画像表示システム
23日前
理研計器株式会社
ガス検出器
15日前
株式会社熊谷組
計測システム
20日前
理研計器株式会社
ガス検出器
15日前
理研計器株式会社
ガス検出器
15日前
富士電機株式会社
エンコーダ
28日前
東ソー株式会社
簡易型液体クロマトグラフ
9日前
大和製衡株式会社
表示システム
5日前
リバークル株式会社
荷重移動試験装置
7日前
株式会社ニコン
検出装置
13日前
株式会社 システムスクエア
検査装置
21日前
株式会社デンソー
試験装置
23日前
東洋計器株式会社
超音波式流量計
20日前
東洋計器株式会社
超音波式流量計
20日前
TDK株式会社
温度センサ
28日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ