TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025059425
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023169506
出願日
2023-09-29
発明の名称
車両用制御装置、車両制御方法、およびプログラム
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B60W
30/16 20200101AFI20250403BHJP(車両一般)
要約
【課題】車両の周辺状況に応じて、乗員に、より適切な車両制御を行うことができる車両用制御装置、車両制御方法、およびプログラムを提供すること。
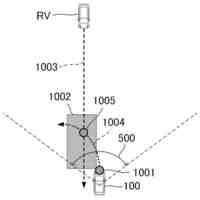
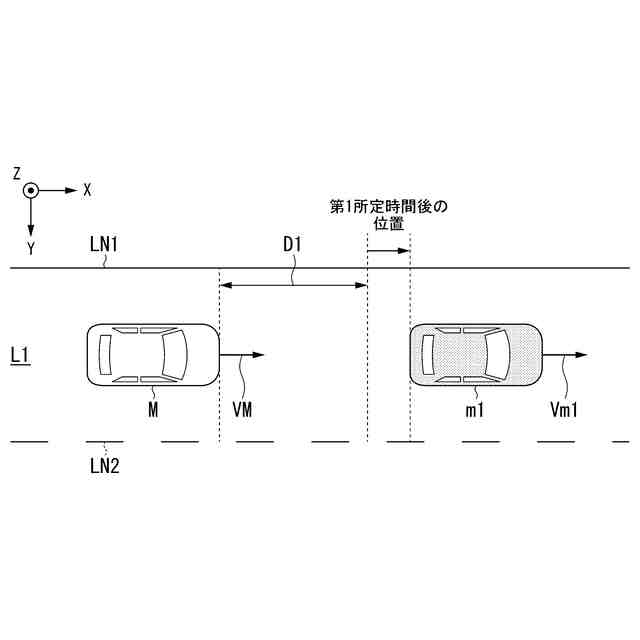
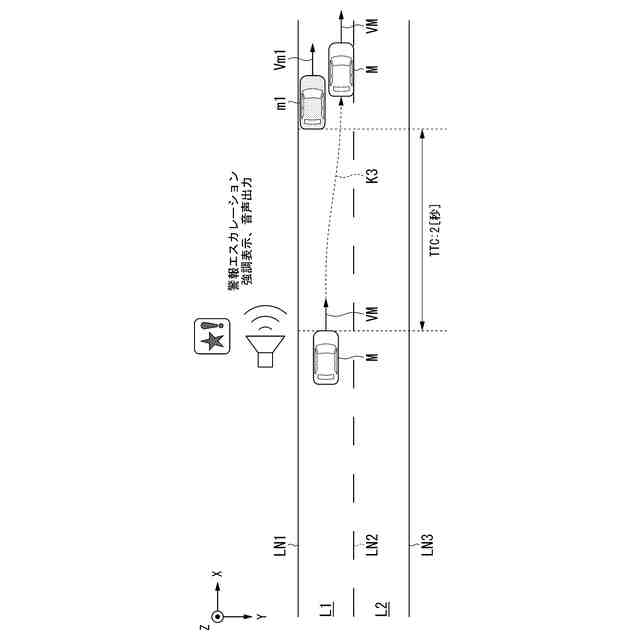
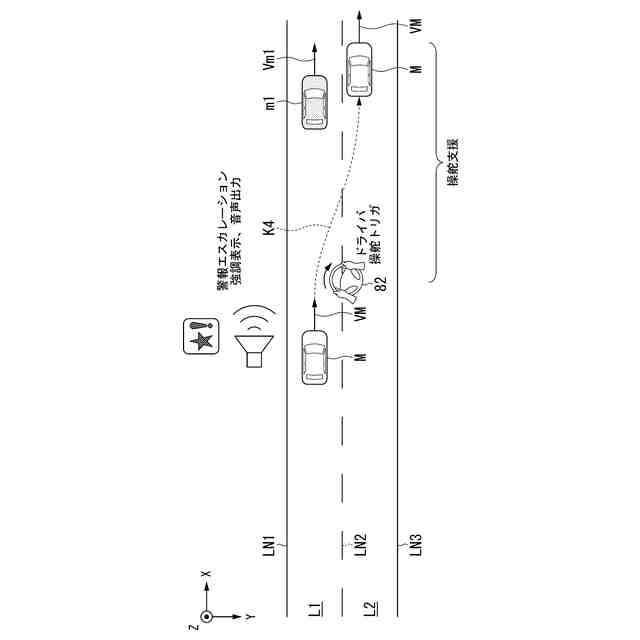
【解決手段】実施形態の車両用制御装置は、自車両の周辺状況を認識する認識部と、前記自車両の乗員の運転状態を検出する運転状態検出部と、前記認識部による認識結果に基づいて前記自車両の前方に他車両が存在すると判定された場合に、接触回避制御として前記自車両の操舵または加減速のうち、一方または双方を制御する制御部と、を備え、前記制御部は、前記自車両と前記他車両との車間時間において、前記他車両を第1所定時間後の位置に存在すると仮定して前記自車両と前記他車両との接触余裕値を導出し、導出した接触余裕値に基づいて前記接触回避制御を実行するか否かの第1判定を行う。
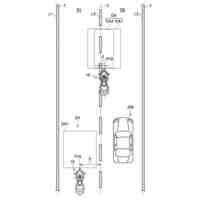
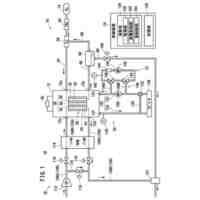
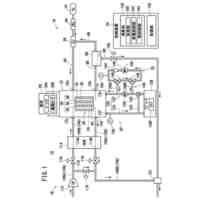
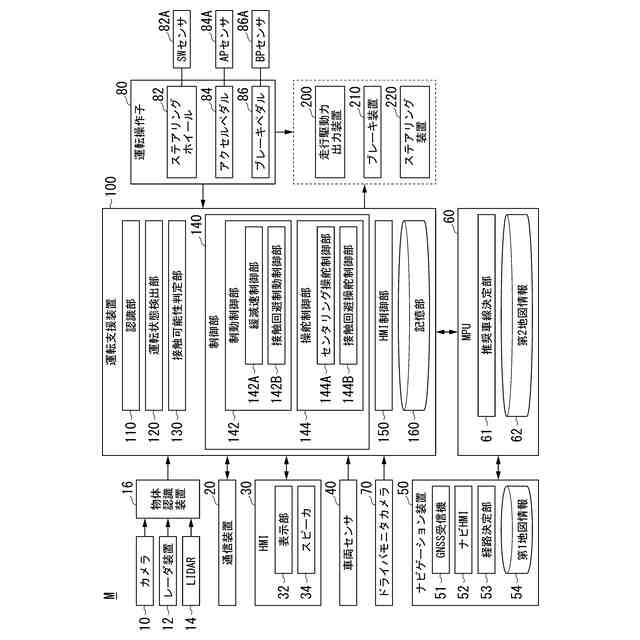
【選択図】図1
特許請求の範囲
【請求項1】
自車両の周辺状況を認識する認識部と、
前記自車両の乗員の運転状態を検出する運転状態検出部と、
前記認識部による認識結果に基づいて前記自車両の前方に他車両が存在すると判定された場合に、接触回避制御として前記自車両の操舵または加減速のうち、一方または双方を制御する制御部と、を備え、
前記制御部は、前記自車両と前記他車両との車間時間において、前記他車両を第1所定時間後の位置に存在すると仮定して前記自車両と前記他車両との接触余裕値を導出し、導出した接触余裕値に基づいて前記接触回避制御を実行するか否かの第1判定を行う、
車両用制御装置。
続きを表示(約 1,400 文字)
【請求項2】
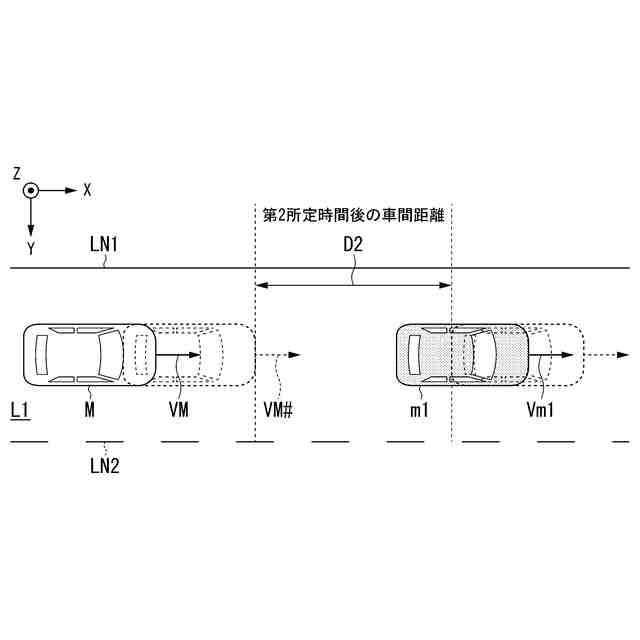
前記制御部は、前記自車両と前記他車両との第2所定時間後の車間距離と速度とを推定し、推定結果に基づいて前記接触回避制御を実行するか否かの第2判定を行う、
請求項1に記載の車両用制御装置。
【請求項3】
前記第1所定時間は、前記第2所定時間よりも短い時間である、
請求項2に記載の車両用制御装置。
【請求項4】
自車両の周辺状況を認識する認識部と、
前記自車両の乗員の運転状態を検出する運転状態検出部と、
前記認識部による認識結果に基づいて前記自車両の前方に他車両が存在すると判定された場合に、接触回避制御として前記自車両の操舵または加減速のうち、一方または双方を制御する制御部と、を備え、
前記制御部は、前記自車両と前記他車両との所定時間後の車間距離と前記自車両の速度とを推定し、推定結果に基づいて前記接触回避制御を実行するか否かの判定を行う、
車両用制御装置。
【請求項5】
コンピュータが、
自車両の周辺状況を認識し、
前記自車両の乗員の運転状態を検出し、
認識した結果に基づいて前記自車両の前方に他車両が存在すると判定された場合に、接触回避制御として前記自車両の操舵または加減速のうち、一方または双方を制御し、
前記自車両と前記他車両との車間時間において、前記他車両を第1所定時間後の位置に存在すると仮定して前記自車両と前記他車両との接触余裕値を導出し、
導出した接触余裕値に基づいて前記接触回避制御を実行するか否かの第1判定を行う、
車両制御方法。
【請求項6】
コンピュータが、
自車両の周辺状況を認識し、
前記自車両の乗員の運転状態を検出し、
認識した結果に基づいて前記自車両の前方に他車両が存在すると判定された場合に、接触回避制御として前記自車両の操舵または加減速のうち、一方または双方を制御し、
前記自車両と前記他車両との所定時間後の車間距離と前記自車両の速度とを推定し、推定結果に基づいて前記接触回避制御を実行するか否かの判定を行う、
車両制御方法。
【請求項7】
コンピュータに、
自車両の周辺状況を認識させ、
前記自車両の乗員の運転状態を検出させ、
認識した結果に基づいて前記自車両の前方に他車両が存在すると判定された場合に、接触回避制御として前記自車両の操舵または加減速のうち、一方または双方を制御させ、
前記自車両と前記他車両との車間時間において、前記他車両を第1所定時間後の位置に存在すると仮定して前記自車両と前記他車両との接触余裕値を導出させ、
導出した接触余裕値に基づいて前記接触回避制御を実行するか否かの第1判定を行わせる、
プログラム。
【請求項8】
コンピュータに、
自車両の周辺状況を認識させ、
前記自車両の乗員の運転状態を検出させ、
認識した結果に基づいて前記自車両の前方に他車両が存在すると判定された場合に、接触回避制御として前記自車両の操舵または加減速のうち、一方または双方を制御させ、
前記自車両と前記他車両との所定時間後の車間距離と前記自車両の速度とを推定させ、推定結果に基づいて前記接触回避制御を実行するか否かの判定を行わせる、
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両用制御装置、車両制御方法、およびプログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
近年、交通参加者の中でも脆弱な立場にある人々にも配慮した持続可能な輸送システムへのアクセスを提供する取り組みが活発化している。この実現に向けて予防安全技術に関する研究開発を通して交通の安全性や利便性をより一層改善する研究開発に注力している。これに関連して、近年では、対象物と自車両との近接可能性があると判定された場合に対象物がカメラ検出範囲に含まれるように自車両の緩ブレーキ制御を行う技術や、車線変更と操舵のいずれか一方の回避動作によって自車両に障害物を回避させた場合の後方車両と障害物との衝突の有無を推定し、推定された衝突の有無に基づいて回避動作を決定する技術が開示されている(例えば、特許文献1、2参照)。
【先行技術文献】
【特許文献】
【0003】
特開2016-200929号公報
特開2019-151185号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
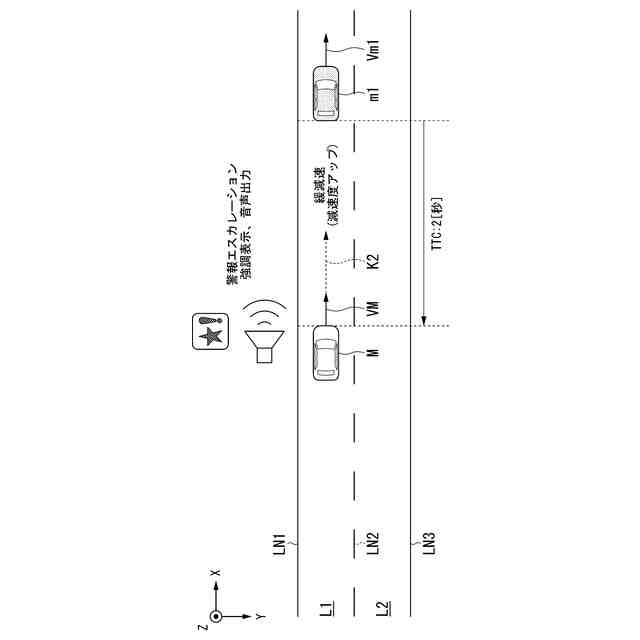
ところで、予防安全技術においては、車両と対象物との接触回避制御を行う前段階で、車両の乗員に周辺の注意喚起を促すための車両挙動については考えられていなかった。そのため、従来では、車両の周辺状況に応じて乗員に適切な車両制御ができていない場合があるというのが課題であった。
【0005】
本願は上記課題の解決のため、車両の周辺状況に応じて、乗員に、より適切な車両制御を行うことができる車両用制御装置、車両制御方法、およびプログラムを提供することを目的の一つとしたものである。そして、延いては持続可能な輸送システムの発展に寄与するものである。
【課題を解決するための手段】
【0006】
この発明に係る車両用制御装置、車両制御方法、およびプログラムは、以下の構成を採用した。
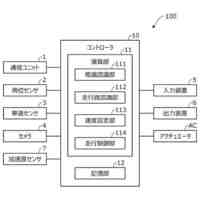
(1):この発明の一態様に係る車両用制御装置は、自車両の周辺状況を認識する認識部と、前記自車両の乗員の運転状態を検出する運転状態検出部と、前記認識部による認識結果に基づいて前記自車両の前方に他車両が存在すると判定された場合に、接触回避制御として前記自車両の操舵または加減速のうち、一方または双方を制御する制御部と、を備え、前記制御部は、前記自車両と前記他車両との車間時間において、前記他車両を第1所定時間後の位置に存在すると仮定して前記自車両と前記他車両との接触余裕値を導出し、導出した接触余裕値に基づいて前記接触回避制御を実行するか否かの第1判定を行う、車両用制御装置である。
【0007】
(2):上記(1)の態様において、前記制御部は、前記自車両と前記他車両との第2所定時間後の車間距離と速度とを推定し、推定結果に基づいて前記接触回避制御を実行するか否かの第2判定を行うものである。
【0008】
(3):上記(2)の態様において、前記第1所定時間は、前記第2所定時間よりも短い時間である。
【0009】
(4):本発明の他の態様に係る車両用制御装置は、自車両の周辺状況を認識する認識部と、前記自車両の乗員の運転状態を検出する運転状態検出部と、前記認識部による認識結果に基づいて前記自車両の前方に他車両が存在すると判定された場合に、接触回避制御として前記自車両の操舵または加減速のうち、一方または双方を制御する制御部と、を備え、前記制御部は、前記自車両と前記他車両との所定時間後の車間距離と前記自車両の速度とを推定し、推定結果に基づいて前記接触回避制御を実行するか否かの判定を行う、車両用制御装置である。
【0010】
(5)本発明の他の態様に係る車両制御方法は、コンピュータが、自車両の周辺状況を認識し、前記自車両の乗員の運転状態を検出し、認識した結果に基づいて前記自車両の前方に他車両が存在すると判定された場合に、接触回避制御として前記自車両の操舵または加減速のうち、一方または双方を制御し、前記自車両と前記他車両との車間時間において、前記他車両を第1所定時間後の位置に存在すると仮定して前記自車両と前記他車両との接触余裕値を導出し、導出した接触余裕値に基づいて前記接触回避制御を実行するか否かの第1判定を行う、車両制御方法である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
本田技研工業株式会社
車両
5日前
本田技研工業株式会社
車両
5日前
本田技研工業株式会社
車両
5日前
本田技研工業株式会社
車両
5日前
本田技研工業株式会社
車両
5日前
本田技研工業株式会社
排気装置
5日前
本田技研工業株式会社
電動車両
5日前
本田技研工業株式会社
触媒構造
5日前
本田技研工業株式会社
制御装置
7日前
本田技研工業株式会社
排気装置
5日前
本田技研工業株式会社
回転電機
1日前
本田技研工業株式会社
回転電機
5日前
本田技研工業株式会社
鞍乗型車両
5日前
本田技研工業株式会社
鞍乗型車両
7日前
本田技研工業株式会社
鞍乗り型車両
5日前
本田技研工業株式会社
フレーム構造
5日前
本田技研工業株式会社
車両制御装置
5日前
本田技研工業株式会社
鞍乗り型車両
5日前
本田技研工業株式会社
車両制御装置
6日前
本田技研工業株式会社
鞍乗り型車両
1日前
本田技研工業株式会社
鞍乗り型車両
5日前
本田技研工業株式会社
車両用前照灯装置
5日前
本田技研工業株式会社
燃料電池システム
5日前
本田技研工業株式会社
車両用前照灯装置
5日前
本田技研工業株式会社
燃料電池システム
5日前
本田技研工業株式会社
燃料製造システム
1日前
本田技研工業株式会社
チェーンスプロケット
5日前
本田技研工業株式会社
超音波センサの取付構造
6日前
本田技研工業株式会社
固体電池の負極及び固体電池
6日前
本田技研工業株式会社
クラッチ装置及び鞍乗型車両
6日前
本田技研工業株式会社
運転支援装置及び運転支援方法
5日前
本田技研工業株式会社
鞍乗型車両の電装部品支持構造
5日前
本田技研工業株式会社
運転支援装置及び運転支援方法
5日前
本田技研工業株式会社
走行支援装置、及び鞍乗り型車両
6日前
本田技研工業株式会社
コイル分離方法及びコイル分離装置
1日前
本田技研工業株式会社
作業機制御システム及び作業指示装置
5日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ