TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025059343
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023169383
出願日
2023-09-29
発明の名称
作業支援システム
出願人
スズキ株式会社
,
株式会社エムスクエア・ラボ
代理人
弁理士法人虎ノ門知的財産事務所
主分類
A01B
69/00 20060101AFI20250403BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】作業を容易に行うことができる作業支援システムを提供することを目的とする。
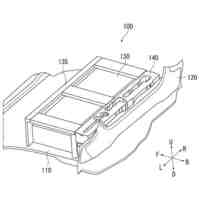
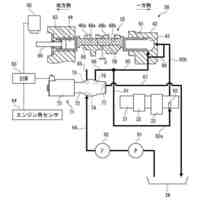
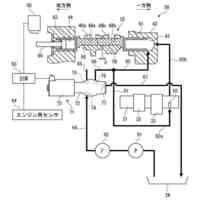
【解決手段】作業支援システム100は、車両ユニット11と、車両ユニットに着脱可能であって車両ユニットに装着された状態で作業を実行可能な作業ユニット12と、を含む作業車両10と、作業車両と通信可能な制御機器20と、を備え、作業車両は、作業車両の異常を検知し、異常に関する異常検知情報を制御機器に送信する異常検知部11Feを有し、制御機器は、異常検知情報を受信した場合、作業車両の動作を中断させる中断指示情報を作業車両に送信する。
【選択図】図2
特許請求の範囲
【請求項1】
車両ユニットと、前記車両ユニットに着脱可能であって前記車両ユニットに装着された状態で作業を実行可能な作業ユニットと、を含む作業車両と、
前記作業車両と通信可能な制御機器と、
を備え、
前記作業車両は、前記作業車両の異常を検知し、前記異常に関する異常検知情報を前記制御機器に送信する異常検知部を有し、
前記制御機器は、前記異常検知情報を受信した場合、前記作業車両の動作を中断させる中断指示情報を前記作業車両に送信する、
作業支援システム。
続きを表示(約 1,400 文字)
【請求項2】
前記作業車両は、前記中断指示情報を受信した場合、前記作業車両の動作を中断し、前記異常検知部によって前記作業車両の異常が解消されたことを検知した場合、前記中断された動作を中断直後の動作から開始する、
請求項1に記載の作業支援システム。
【請求項3】
前記制御機器は、前記作業車両への動作指示に関する動作指示情報を前記作業車両に送信し、
前記作業車両は、前記制御機器から受信した前記動作指示情報に基づく動作の実行中に前記異常検知情報を受信したら、前記動作指示情報に基づく動作を中断する、
請求項1に記載の作業支援システム。
【請求項4】
前記作業車両は、前記中断指示情報の受信により前記動作指示情報に基づく動作を中断したら、前記制御機器から新たな前記動作指示情報を受け付け可能に構成される、
請求項3に記載の作業支援システム。
【請求項5】
前記制御機器は、操作入力を受け付ける操作入力部を有し、
前記作業車両は、前記中断指示情報を受信した場合、前記作業車両の動作を中断して、前記操作入力部への操作入力に応じたリアルタイムの遠隔操作を受け付け可能に構成される、
請求項1に記載の作業支援システム。
【請求項6】
前記作業車両は、前記遠隔操作によって前記中断した動作を途中から開始可能な地点に移動し、当該地点に位置したら前記中断した動作を途中から再開する、
請求項5に記載の作業支援システム。
【請求項7】
前記制御機器は、操作入力を受け付ける操作入力部を有する操作端末と、前記作業車両及び前記操作端末と通信可能なサーバとを含み、
前記サーバは、前記操作入力部への操作入力に基づいて、前記中断指示情報を前記作業車両に送信可能である、
請求項1~6の何れか1項に記載の作業支援システム。
【請求項8】
前記車両ユニットは、それぞれが異なる作業を実行可能な複数種類の前記作業ユニットを装着可能であり、
前記作業車両は、複数種類の前記作業ユニットから選択された1つの前記作業ユニットを前記車両ユニットに装着することで構成され、
前記制御機器は、前記車両ユニットに装着された前記作業ユニットの種類に関する情報を含む作業ユニット識別情報を受信したら、前記車両ユニットに装着された前記作業ユニットの種類に対応した操作入力を受け付ける、
請求項1~6の何れか1項に記載の作業支援システム。
【請求項9】
前記制御機器は、操作入力を受け付ける操作入力部を有する操作端末と、前記作業車両及び前記操作端末と通信可能なサーバとを含み、
前記操作端末は、前記作業車両を利用するユーザが操作するユーザ操作端末と、前記作業車両を管理するオペレータが操作するオペレータ操作端末とを含み、
前記ユーザ操作端末と前記オペレータ操作端末とは、前記サーバを介して通信可能に構成されており、
前記ユーザ操作端末は、前記オペレータ操作端末に対して前記作業車両への動作指示を依頼可能であり、
前記オペレータ操作端末は、前記ユーザ操作端末から依頼された前記作業車両への前記動作指示に関する動作指示情報を前記作業車両に送信し、
前記作業車両は、前記動作指示情報に基づいて動作する、
請求項1~6の何れか1項に記載の作業支援システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業支援システムに関する。
続きを表示(約 4,200 文字)
【背景技術】
【0002】
例えば、特許文献1には、走行原動機の駆動により走行する走行車体を備え、走行車体に農作業用原動機の駆動により作動する第一農作業装置と走行原動機からの伝動により作動する第二農作業装置との何れか一方を選択的に装着可能な構成の農作業機が開示されている。この農作業機は、第一農作業装置を装着した場合に該第一農作業装置の作動速度が走行車体の走行速度に比例するよう前記走行速度に基づいて農作業用原動機の駆動速度を変更制御する制御装置を設けると共に、前記走行速度が所定値より高速側であるときに警報を発する警報装置を、第一農作業装置の装着状態の検出に基づいて作動させ、第二農作業装置の装着状態の検出に基づいて作動させない構成となっている。
【先行技術文献】
【特許文献】
【0003】
特開2005-130800号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
例えば、農作業は身体的な労働負荷の大きい作業であり、従来から耕運機や田植機等の農作業機が開発されてきた。しかしながら、このような農作業機は、1台当たりの価格が高額であり、作業毎に農作業機を取り揃える場合、費用や管理スペースの点でユーザの負担が大きかった。また、高機能な農作業機ほど身体的な労働負荷は軽減されるが、農作業機の操作は複雑化する傾向がある。そのため、農作業等の身体的な労働負荷の大きい作業を容易に行うことが望まれている。
【0005】
本発明は、上記の事情に鑑みてなされたものであって、作業を容易に行うことができる作業支援システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明に係る作業支援システムは、車両ユニットと、前記車両ユニットに着脱可能であって前記車両ユニットに装着された状態で作業を実行可能な作業ユニットと、を含む作業車両と、前記作業車両と通信可能な制御機器と、を備え、前記作業車両は、前記作業車両の異常を検知し、前記異常に関する異常検知情報を前記制御機器に送信する異常検知部を有し、前記制御機器は、前記異常検知情報を受信した場合、前記作業車両の動作を中断させる中断指示情報を前記作業車両に送信する。
【発明の効果】
【0007】
本発明に係る作業支援システムは、作業を容易に行うことができるという効果を奏する。
【図面の簡単な説明】
【0008】
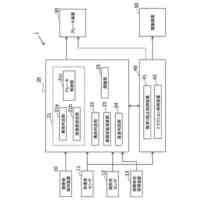
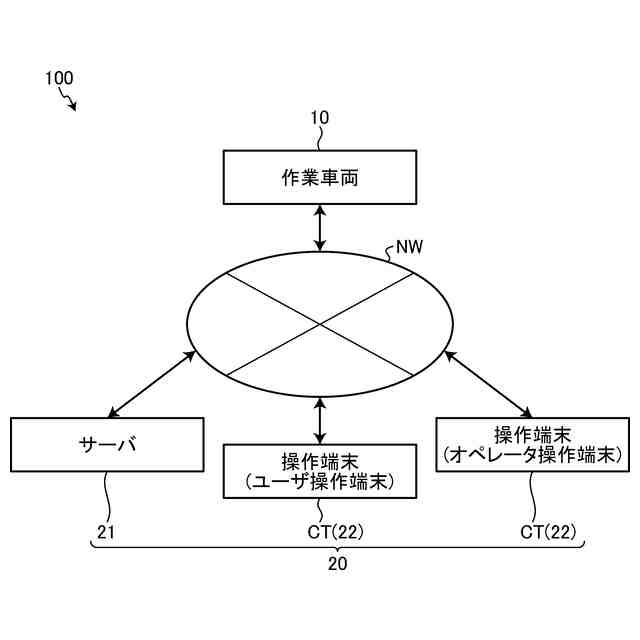
図1は、第1実施形態に係る作業支援システムを表すブロック図である。
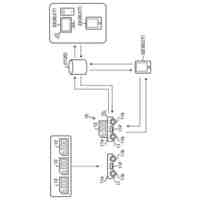
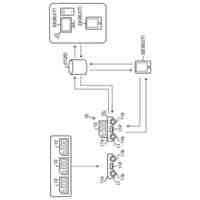
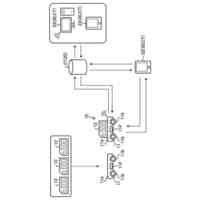
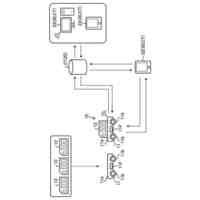
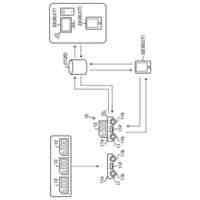
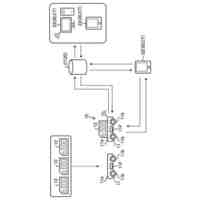
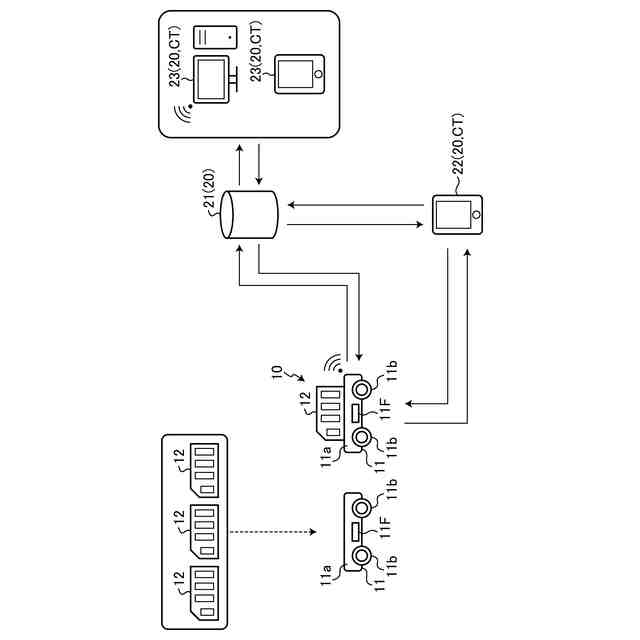
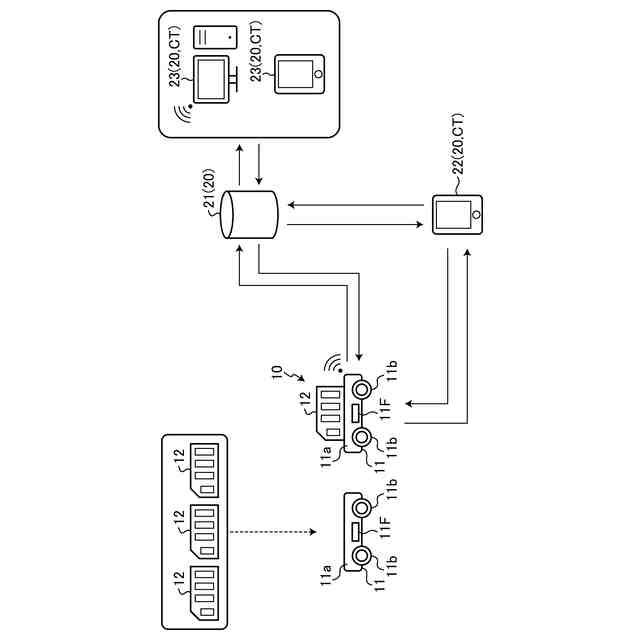
図2は、第1実施形態に係る作業支援システムの概略構成を表すブロック図である。
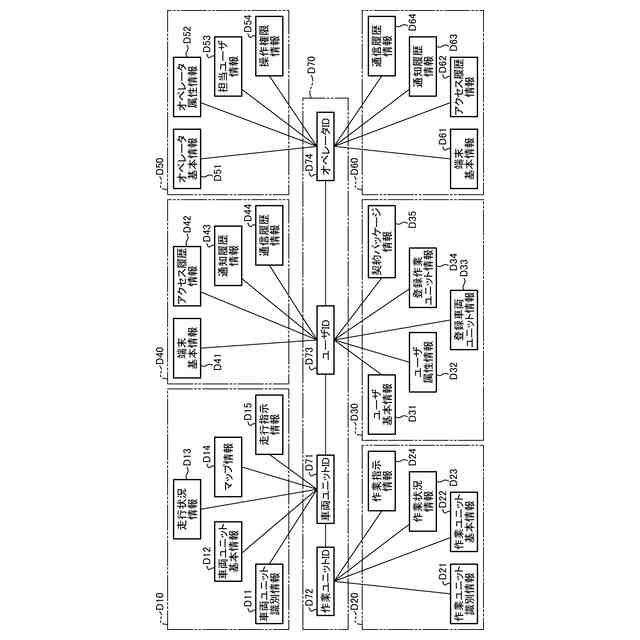
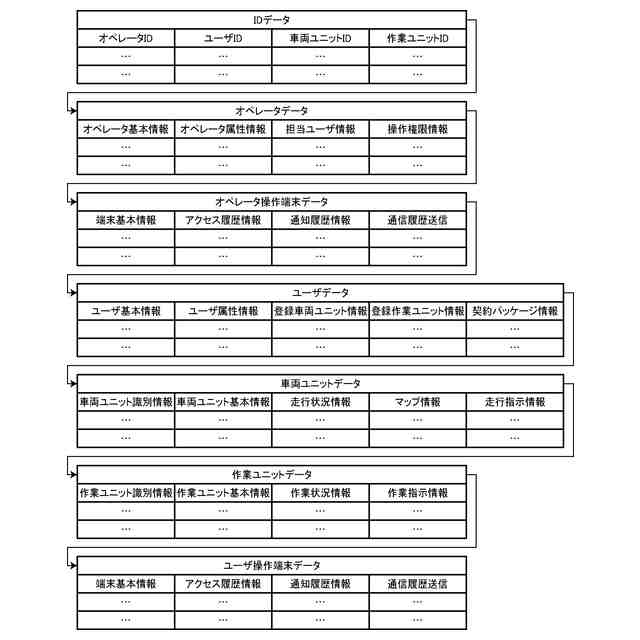
図3は、第1実施形態に係る作業支援システムで取り扱う主なデータについて説明する模式図である。
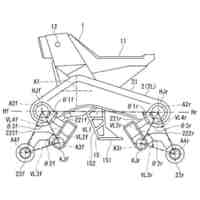
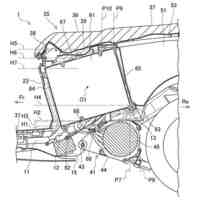
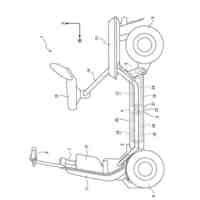
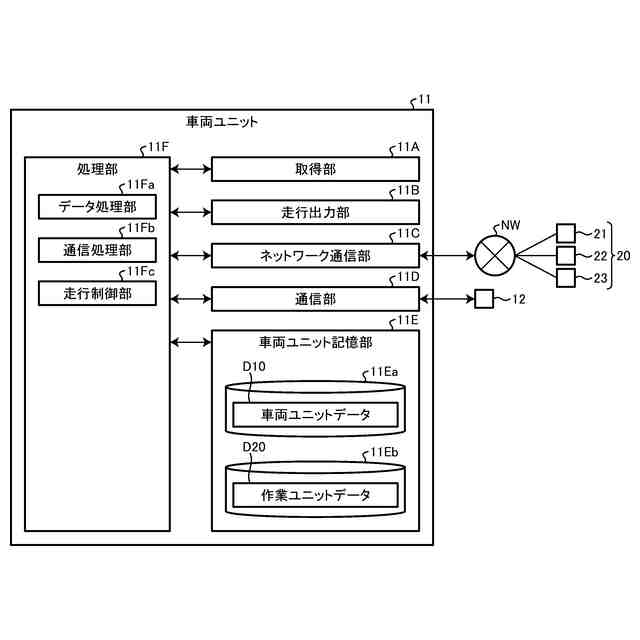
図4は、第1実施形態に係る作業支援システムが備える車両ユニットの概略構成を表すブロック図である。
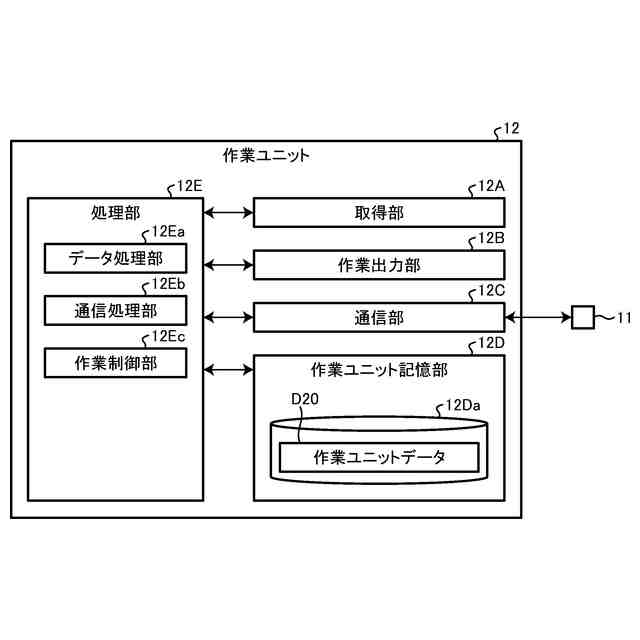
図5は、第1実施形態に係る作業支援システムが備える作業ユニットの概略構成を表すブロック図である。
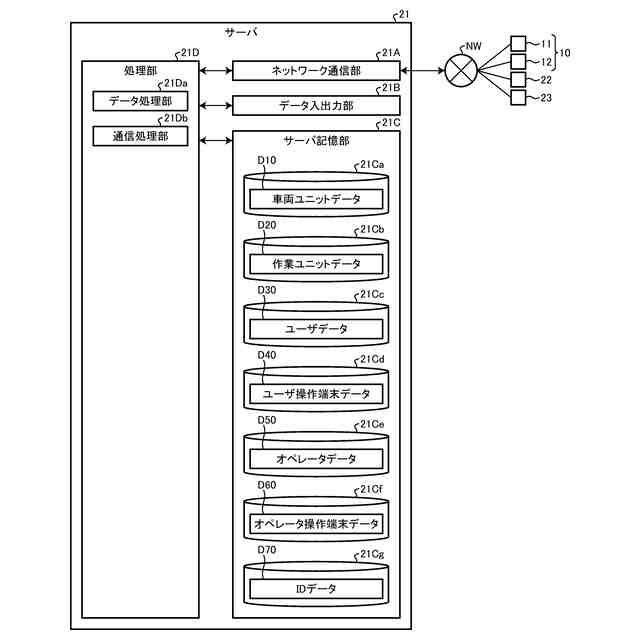
図6は、第1実施形態に係る作業支援システムが備えるサーバの概略構成を表すブロック図である。
図7は、第1実施形態に係る作業支援システムで取り扱う主なデータについて説明する模式図である。
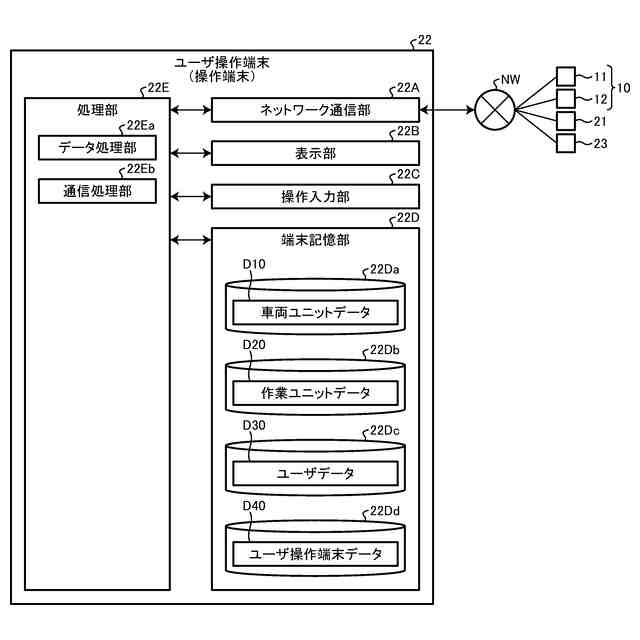
図8は、第1実施形態に係る作業支援システムが備えるユーザ操作端末の概略構成を表すブロック図である。
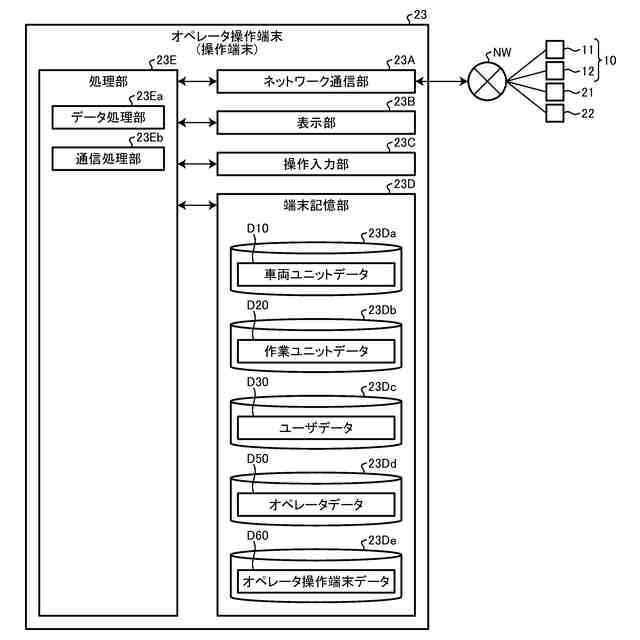
図9は、第1実施形態に係る作業支援システムが備えるオペレータ操作端末の概略構成を表すブロック図である。
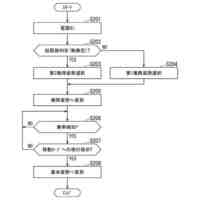
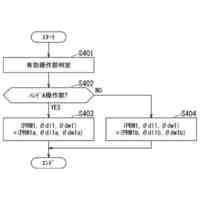
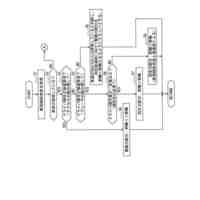
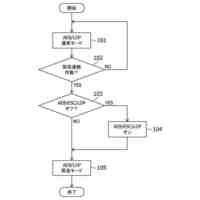
図10は、第1実施形態に係る作業支援システムにおける作業車両の操作を表すフローチャート図である。
図11は、第1実施形態に係る作業支援システムにおける作業車両の操作を表すフローチャート図である。
図12は、第1実施形態の第1変形例に係る作業支援システムが備える車両ユニットの概略構成を表すブロック図である。
図13は、第1実施形態の第1変形例に係る作業支援システムが備える作業ユニットの概略構成を表すブロック図である。
図14は、第1実施形態の第1変形例に係る作業支援システムにおける作業車両の操作を表すフローチャート図である。
図15は、第1実施形態の第1変形例に係る作業支援システムにおける作業車両の操作を表すフローチャート図である。
図16は、第2実施形態に係る作業支援システムにおける操作端末に表示される作業車両への操作入力用のマップの一例を示す図である。
図17は、第2実施形態に係る作業支援システムにおける作業車両の操作を表すフローチャート図である。
図18は、第2実施形態に係る作業支援システムにおける作業車両の操作を表すフローチャート図である。
図19は、第2実施形態の第1変形例に係る作業支援システムによる作業車両の操作を示す模式図である。
図20は、第2実施形態の第1変形例に係る作業支援システムにおける作業車両の操作を表すフローチャート図である。
図21は、第2実施形態の第2変形例に係る作業支援システムにおける操作端末に表示される作業車両への操作入力用のマップの一例を示す図である。
図22は、第2実施形態の第2変形例に係る作業支援システムにおける作業車両の操作を表すフローチャート図である。
図23は、第2実施形態の第3変形例に係る作業支援システムにおける操作端末に表示される作業車両への操作入力用のマップの一例を示す図である。
図24は、第2実施形態の第3変形例に係る作業支援システムにおける操作端末に表示される作業車両への操作入力用のマップの一例を示す図である。
図25は、第2実施形態の第3変形例に係る作業支援システムにおける作業車両の操作を表すフローチャート図である。
図26は、第2実施形態の第3変形例に係る作業支援システムにおける作業車両の操作を表すフローチャート図である。
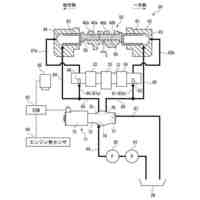
図27は、第3実施形態に係る作業支援システムを表すブロック図である。
図28は、第3実施形態に係る作業支援システムが備える車両ユニットの概略構成を表すブロック図である。
図29は、第3実施形態に係る作業支援システムにおける作業車両の操作を表すフローチャート図である。
図30は、第3実施形態の第1変形例に係る作業支援システムを表すブロック図である。
図31は、第3実施形態の第1変形例に係る作業支援システムにおける作業車両の操作を表すフローチャート図である。
図32は、第3実施形態の第2変形例に係る作業支援システムが備えるサーバの概略構成を表すブロック図である。
図33は、第3実施形態の第2変形例に係る作業支援システムにおける作業車両の操作を表すフローチャート図である。
図34は、第3実施形態の第3変形例に係る作業支援システムにおける作業車両の操作を表すフローチャート図である。
図35は、第3実施形態の第4変形例に係る作業支援システムが備える車両ユニットを表すブロック図である。
図36は、第3実施形態の第4変形例に係る作業支援システムにおける作業車両の操作を表すフローチャート図である。
図37は、第3実施形態の第5変形例に係る作業支援システムが備える車両ユニットを表すブロック図である。
図38は、第3実施形態の第5変形例に係る作業支援システムが備える作業ユニットを表すブロック図である。
図39は、第3実施形態の第5変形例に係る作業支援システムにおける作業車両の操作を表すフローチャート図である。
図40は、第4実施形態に係る作業支援システムが備える車両ユニットを表すブロック図である。
図41は、第4実施形態に係る作業支援システムにおける操作端末に表示される作業車両への操作入力用のマップの一例を示す図である。
図42は、第4実施形態に係る作業支援システムにおける作業車両の操作を表すフローチャート図である。
図43は、第5実施形態に係る作業支援システムが備える車両ユニットを表すブロック図である。
図44は、第5実施形態に係る作業支援システムにおける作業車両の操作を表すフローチャート図である。
図45は、第5実施形態の第1変形例に係る作業支援システムが備える車両ユニットを表すブロック図である。
図46は、第5実施形態の第1変形例に係る作業支援システムが備える作業ユニットを表すブロック図である。
【発明を実施するための形態】
【0009】
以下に、本発明に係る実施形態を図面に基づいて詳細に説明する。なお、この実施形態によりこの発明が限定されるものではない。また、下記実施形態における構成要素には、当業者が置換可能かつ容易なもの、あるいは実質的に同一のものが含まれる。
【0010】
[第1実施形態]
<作業支援システムの概要>
図1、図2に示す第1実施形態に係る作業支援システム100は、作業車両10と、制御機器20とを備え、これらがネットワークNWを通じて相互に通信可能に構成される。ネットワークNWは、複数の機器を相互に通信可能に接続する通信網を構成するものであり、有線、無線を問わず本システムに適用可能な種々の通信方式によってデータ通信を可能とする。ネットワークNWは、例えば、インターネット回線網、携帯電話回線網、移動体通信網、LAN(Local Area Network)、WAN(Wide Area Network)、VPN(Virtual Private Network)等によって構成され、アンテナ、ゲートウェイ、ルータ、ハブ等の様々なネットワーク中継機器を介在させていてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
スズキ株式会社
移動体
26日前
スズキ株式会社
移動体
26日前
スズキ株式会社
船外機
4日前
スズキ株式会社
船外機
4日前
スズキ株式会社
移動体
26日前
スズキ株式会社
移動体
26日前
スズキ株式会社
車体構造
25日前
スズキ株式会社
鞍乗型車両
25日前
スズキ株式会社
鞍乗型車両
25日前
スズキ株式会社
鞍乗型車両
25日前
スズキ株式会社
鞍乗型車両
25日前
スズキ株式会社
鞍乗型車両
25日前
スズキ株式会社
流体封止構造
27日前
スズキ株式会社
可変動弁装置
26日前
スズキ株式会社
可変動弁装置
26日前
スズキ株式会社
可変動弁装置
26日前
スズキ株式会社
車両側部構造
3日前
スズキ株式会社
車両側部構造
3日前
スズキ株式会社
車両の制御装置
11日前
スズキ株式会社
車両用制御装置
11日前
スズキ株式会社
車両用制御装置
11日前
スズキ株式会社
車両用制御装置
4日前
スズキ株式会社
車両の吸気構造
26日前
スズキ株式会社
車両用制御装置
18日前
スズキ株式会社
作業支援システム
25日前
スズキ株式会社
作業支援システム
25日前
スズキ株式会社
作業支援システム
25日前
スズキ株式会社
作業支援システム
25日前
スズキ株式会社
作業支援システム
25日前
スズキ株式会社
作業支援システム
25日前
スズキ株式会社
車両の制御システム
12日前
スズキ株式会社
内燃機関の制御装置
5日前
スズキ株式会社
車両の制御システム
13日前
スズキ株式会社
車両のホーン取付構造
26日前
スズキ株式会社
車両用コンソール構造
3日前
スズキ株式会社
電動車両のバッテリ搭載構造
27日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ