TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025058916
公報種別
公開特許公報(A)
公開日
2025-04-09
出願番号
2024134049
出願日
2024-08-09
発明の名称
自エージェントのオペレータを支援するための方法、プログラム、記憶媒体、および支援システム
出願人
本田技研工業株式会社
代理人
弁理士法人クシブチ国際特許事務所
主分類
B60W
30/095 20120101AFI20250401BHJP(車両一般)
要約
【課題】将来の状況におけるリスクを自エージェントのオペレータに伝達することによってオペレータを支援するための方法およびシステムを提供すること。
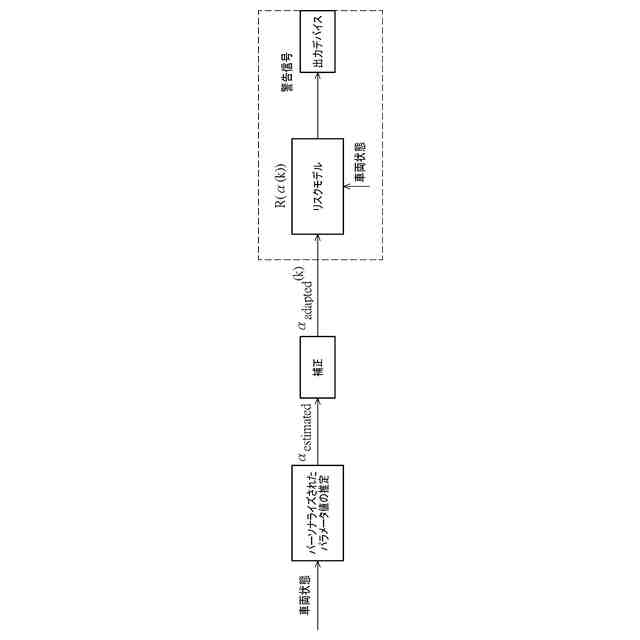
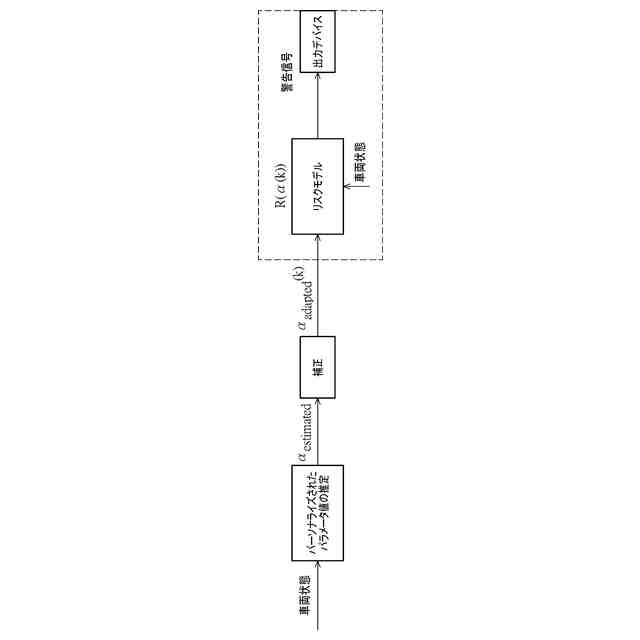
【解決手段】第1および第2の計画された行動を決定するために、行動計画アルゴリズムのコスト関数においてパラメータの第1の値および第2の値を使用して、行動計画アルゴリズムが適用される。実際の行動を決定するために、自エージェントの現在の状態が特定される。第1および第2の計画された行動と自エージェントの実際の行動との関係に基づいて、パーソナライズされたパラメータ値が推定される。パーソナライズされたパラメータ値および目標パラメータ値に基づいて、パラメータ補正値が決定される。適応されたパラメータ値を生成するために、パーソナライズされたパラメータ値は、パラメータ補正値を使用して補正される。適応されたパラメータ値に基づいて、行動計画アルゴリズムが適用され、リスクを推定すること、リスクはその後、オペレータに伝達される。
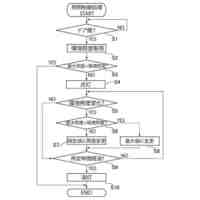
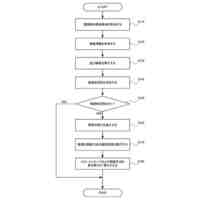
【選択図】図5
特許請求の範囲
【請求項1】
将来の状況におけるリスクを自エージェントのオペレータに伝達することによって前記オペレータを支援するための方法であって、
行動計画アルゴリズムのコスト関数において少なくともパラメータの第1の値および前記パラメータの第2の値を使用して前記行動計画アルゴリズムを適用して、少なくとも第1および第2の計画された行動を決定するステップと、
前記自エージェントの現在の状態を特定して実際の行動を決定するステップと、
少なくとも前記第1および第2の計画された行動と前記自エージェントの前記実際の行動との関係に基づいて、パーソナライズされたパラメータ値を推定するステップと、
少なくとも前記パーソナライズされたパラメータ値および目標パラメータ値に基づいて、パラメータ補正値を決定するステップと、
前記パラメータ補正値を使用して、前記パーソナライズされたパラメータ値を補正することによって、適応されたパラメータ値を生成するステップと、
前記適応されたパラメータ値に基づいて前記行動計画アルゴリズムを適用し、前記将来のリスクを推定するステップと、
推定された前記リスクを前記オペレータに伝達するステップと
を含む、方法。
続きを表示(約 1,100 文字)
【請求項2】
前記パーソナライズされたパラメータ値の前記推定が、前記実際の行動を少なくとも前記第1および第2の計画された行動で補間することを含む、請求項1に記載の方法。
【請求項3】
前記パーソナライズされたパラメータ値の前記推定が、前記実際の行動の加速度と、少なくとも前記第1および第2の計画された行動による加速度とを比較することを含む、請求項1に記載の方法。
【請求項4】
前記パラメータ補正値が、前記目標パラメータ値と前記パーソナライズされたパラメータ値との間の差異および補正係数に基づいて算出される、請求項1に記載の方法。
【請求項5】
前記パラメータ補正値が、前記目標パラメータ値と前記パーソナライズされたパラメータ値との間の差異および補正係数に基づいて算出され、前記補正係数の値が、前記パーソナライズされたパラメータ値と前記目標パラメータ値との間の差異およびオペレータ条件のうちの少なくとも一方に基づいて決定される、請求項1に記載の方法。
【請求項6】
前記パーソナライズされたパラメータ値の前記推定が、自車両の動作中に繰り返し実行される、請求項1に記載の方法。
【請求項7】
前記パーソナライズされたパラメータ値が、少なくとも前記第1および第2の計画された行動と前記自エージェントの実際の行動との前記関係に基づいて推定された複数の実際のパラメータ値に基づいて推定される、請求項1に記載の方法。
【請求項8】
自車両の以前の動作中に推定された最後のパーソナライズされたパラメータ値が、現在の動作の前記リスク推定のための前記パーソナライズされたパラメータ値として使用される、請求項1に記載の方法。
【請求項9】
自車両の以前の動作中に推定された最後のパーソナライズされたパラメータ値が、前記自車両の前記現在の動作中に推定された前記パーソナライズされたパラメータ値で更新され、更新されたパーソナライズされたパラメータ値が、前記現在の動作の前記リスク推定のための前記パーソナライズされたパラメータ値として使用される、請求項1に記載の方法。
【請求項10】
実際のパラメータ値が、少なくとも前記第1および第2の計画された行動と前記自エージェントの実際の行動との前記関係に基づいて繰り返し推定され、最新の実際のパラメータ値について信頼度尺度が算出され、前記最新の実際のパラメータ値の信頼度尺度が信頼度閾値を超える場合、前記最新の実際のパラメータ値が、前記パーソナライズされたパラメータ値として引き継がれる、請求項1に記載の方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
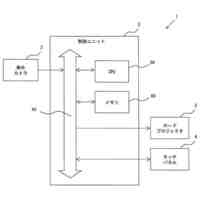
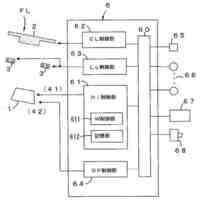
本開示は、自エージェントのオペレータを支援する分野に関する。詳細には、自エージェントのオペレータを支援するための方法、プログラムコードを含む対応するプログラム、対応する非一過性コンピュータ可読記憶媒体、および自エージェントのオペレータを支援するための支援システムが提案される。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
人々が他のエージェントも存在する環境において自エージェントを動作させる場合、一般的にエージェント間の衝突のリスクがある。交通密度はここ数年で大幅に増加しており、エージェントのオペレータが、衝突が回避され得るように環境内の他のすべてのエージェントの行動に適時に反応するために他のすべてのエージェントを観察することは非常に困難である。さらに、車両の動作中に遭遇する他のリスク、例えば、カーブリスクまたは規制リスクが存在する。最新のプロセッサの性能、および自エージェントの環境に関する情報をプロセッサに提供するレーダセンサ、カメラ、LIDARセンサなどのセンサの可用性により、オペレータによる自エージェントの動作中に自エージェントのオペレータを支援することが可能である。しかしながら、自エージェントを動作させるスタイルはオペレータごとに大きく異なる。したがって、多くの状況において、支援システムは、オペレータの注意をそらすような方法で行動を提案するか、または(例えば、半自動運転の場合)オペレータによる制御動作を妨げることさえある。
【0003】
オペレータが煩わしさを感じないように、したがってシステムによって行われる支援の許容度が高まるように、システムを個々のオペレータの行動に適応させるように試みた手法がいくつか存在する。例えば、米国特許第9,623,878(B2)号は、運転者の習慣を学習してパーソナライズされた運転者支援システムを提案している。しかしながら、提案されたシステムは、制御パラメータ、例えばACC(適応的走行制御)の目標距離を運転者の特定の運転スタイルに合わせて調整する。残念ながら、このような手法は、個々の運転スタイルを反映するが運転者の行動には影響を与えない支援システムとなる。
【0004】
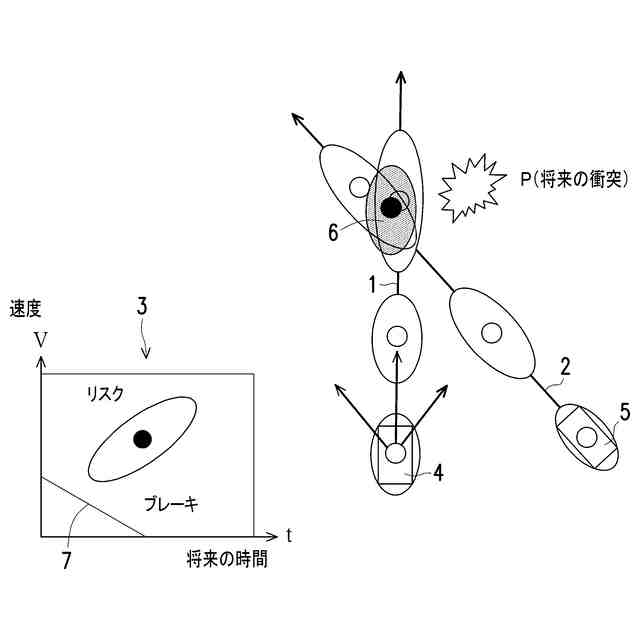
自動運転または部分的自動運転用の制御信号を生成するための様々な手法が多数開発されている。手法の1つは、米国特許第9,463,797(B2)号に記載されており、この手法では、自エージェントの将来の軌道が予測され、その予測から自エージェントの複数の軌道の代替案が生成される。さらに、別のエージェントの仮想的な将来の軌道が決定され、自エージェントの軌道と別のエージェントの軌道との少なくとも1つのペアに基づいて時間の経過に伴うリスク関数が、または自エージェントの算出された仮想的な軌道に沿って代替案が、算出される。次いで、これらのリスク関数はリスクマップに組み込まれ、リスクマップはその後、分析されて、制御信号が生成される。
【0005】
米国特許第10,627,812(B2)号は、知られている支援システムの別の問題に関する。正確な予測を行うには、予測アルゴリズムで使用される環境に関する情報が正確である必要がある。しかしながら、ほとんどの情報は1つまたは複数のセンサを使用して取得されるので、交通状況を正確に評価するために関連する環境内の特定の領域が遮蔽されることがある。米国特許第10,627,812(B2)号は、センサデータの信頼性が特定の閾値を下回る領域またはセンサデータがまったく利用できない領域において仮想交通エンティティを想定することによって、このような死角のリスクを軽減し、仮想交通エンティティが自エージェントの予測された行動と相互作用できるようにする。それぞれのリスク尺度が推定され、推定されたリスク尺度が自エージェントの制御アクションに考慮される。
【0006】
米国特許出願公開第2020/0231149(A1)号は、自エージェントと少なくとも1人の他の交通参加者との間の優先関係を考慮し、交通参加者のそれぞれの予測モデルを選択することによって、自エージェントの運転者をサポートする。したがって、予測モデルの選択は、関与するエージェント間の決定された優先関係を考慮に入れ、したがって、他のエージェントの将来の行動のより厳密な予測によって支援を改善する。
【0007】
EP4068153A1は、高度な運転者支援システムについて説明しており、このシステムでは、センサから受信した情報に基づいて環境の特徴が特定され、その特徴のリスクゾーンが推定される。次いで、特徴および特徴のリスクゾーンが、マップ内の車両の環境とともにディスプレイ上に表示される。
【先行技術文献】
【特許文献】
【0008】
米国特許第9,623,878(B2)号
米国特許第9,463,797(B2)号
米国特許第10,627,812(B2)号
米国特許出願公開第2020/0231149(A1)号
【発明の概要】
【発明が解決しようとする課題】
【0009】
知られている支援システムの上記で提供された例が明らかに示しているように、リスクを推定してそのリスクに関する情報をエージェントのオペレータに提供するため、またはエージェントの制御をそのオペレータの習慣に適応させるためには、いくつかの異なる手法がある。しかしながら、交通状況におけるあるエージェントの1人のオペレータのスタイルが別のエージェントのスタイルと大幅に異なる可能性があるという問題が依然として存在する。これは、特定の状況の誤った解釈につながるおそれがあり、人間のオペレータだけでなく自動化システムにとっても困難である。したがって、依然として、交通状況に関与する複数のエージェントのオペレータの動作スタイルを調和させる方法を見出す必要がある。このような調和は、予測の品質およびその信頼性を大幅に高め、交通安全性を直接的に向上させる。
【課題を解決するための手段】
【0010】
本発明では、この問題は、個々のオペレータの習慣に基づいて将来のリスクの推定を適応させることによって解決されるが、先行技術から知られているものとは対照的に、オペレータの期待に応えようとするだけでなくオペレータのスタイルと目標スタイルとの間の差異をさらに考慮することによって解決される。これは、伝達される出力が最終的にオペレータ(運転者)を目標スタイルに向けて教育するものとなるように、将来のリスクの推定を適応させることによって達成される。この目標スタイルは、例えば、平均的な運転スタイルであり、エージェントのどのオペレータにとっても目標スタイルに沿った動作が達成される場合、異なるエージェント間の運転スタイルの危険な差異が軽減され得る。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
飛行自動車
2か月前
個人
警告装置
2日前
個人
小型EVシステム
4日前
日本精機株式会社
ケース
10日前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
17日前
日本精機株式会社
表示装置
17日前
日本精機株式会社
照明装置
1か月前
日本精機株式会社
表示装置
1か月前
個人
アンチロール制御装置
24日前
日本精機株式会社
表示装置
1か月前
株式会社松華
懸架装置
1か月前
個人
ブレーキシステム
15日前
横浜ゴム株式会社
タイヤ
14日前
個人
自走式立体型洗車場
1か月前
個人
自動車ドア開度規制ベルト
3日前
個人
ステージカー
1か月前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用照明装置
2か月前
帝国繊維株式会社
作業車両
9日前
井関農機株式会社
作業車両
22日前
日本精機株式会社
車両用表示装置
1か月前
マツダ株式会社
車両
1か月前
マツダ株式会社
車両
1か月前
株式会社ユーシン
照明装置
17日前
スズキ株式会社
車両制御装置
11日前
個人
農業機械への架線給電システム
28日前
エムケー精工株式会社
車両処理装置
16日前
コイト電工株式会社
座席装置
1か月前
株式会社クボタ
作業車両
2か月前
株式会社SUBARU
車載装置
1か月前
株式会社小糸製作所
車両用灯具
17日前
ダイハツ工業株式会社
車両構造
4日前
個人
Aピラー死角エリヤ確認用ミラー
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ