TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025058719
公報種別
公開特許公報(A)
公開日
2025-04-09
出願番号
2023168837
出願日
2023-09-28
発明の名称
情報処理装置、自律車両、情報処理装置の制御方法、プログラム及び記憶媒体
出願人
本田技研工業株式会社
代理人
弁理士法人大塚国際特許事務所
主分類
G06T
7/70 20170101AFI20250402BHJP(計算;計数)
要約
【課題】物体までの距離を精度よく取得するための技術を提供する。
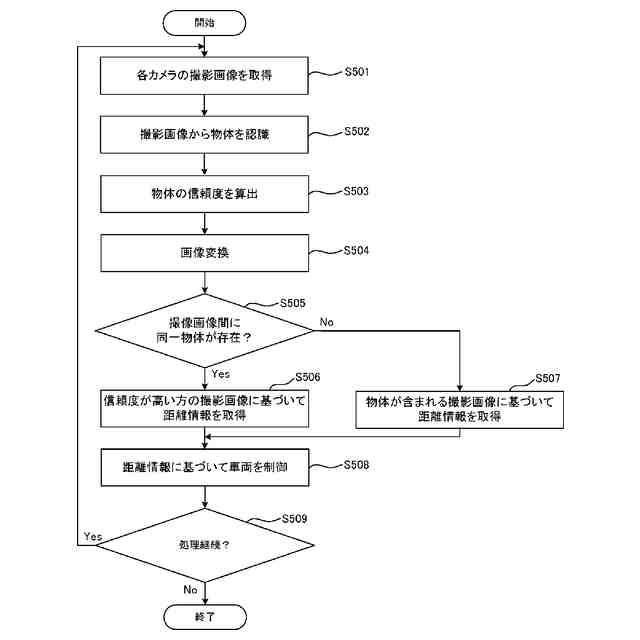
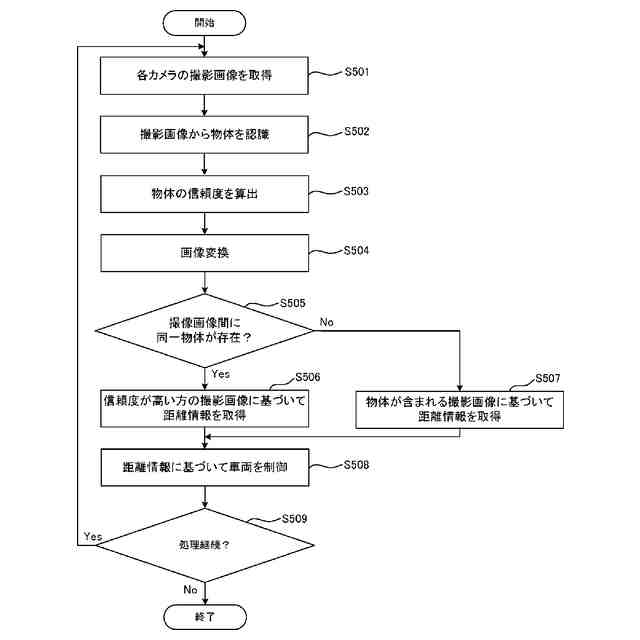
【解決手段】情報処理装置であって、第1のカメラの第1の撮影画像と第2のカメラの第2の撮影画像とを取得する画像取得手段と、前記第1の撮影画像及び前記第2の撮影画像からそれぞれ物体を認識する物体認識手段と、前記物体が当該物体である確からしさを示す信頼度を、前記第1の撮影画像及び前記第2の撮影画像のそれぞれについて算出する信頼度算出手段と、前記第1の撮影画像及び前記第2の撮影画像の間に同一の物体が存在するかどうかを判定する判定手段と、前記判定手段により同一の物体が存在すると判定された場合、前記信頼度算出手段により算出された信頼度が高い方の撮影画像に対する前記物体認識手段の物体認識結果に基づいて、前記物体までの距離情報を取得する距離取得手段とを備える。
【選択図】 図5
特許請求の範囲
【請求項1】
情報処理装置であって、
第1のカメラの第1の撮影画像と第2のカメラの第2の撮影画像とを取得する画像取得手段と、
前記第1の撮影画像及び前記第2の撮影画像からそれぞれ物体を認識する物体認識手段と、
前記物体が当該物体である確からしさを示す信頼度を、前記第1の撮影画像及び前記第2の撮影画像のそれぞれについて算出する信頼度算出手段と、
前記第1の撮影画像及び前記第2の撮影画像の間に同一の物体が存在するかどうかを判定する判定手段と、
前記判定手段により同一の物体が存在すると判定された場合、前記信頼度算出手段により算出された信頼度が高い方の撮影画像に対する前記物体認識手段の物体認識結果に基づいて、前記物体までの距離情報を取得する距離取得手段と、
を備えることを特徴とする情報処理装置。
続きを表示(約 1,500 文字)
【請求項2】
前記第1の撮影画像で認識された物体を囲む第1のバウンディングボックスを、前記第2の撮影画像上に射影変換する変換手段をさらに備え、
前記判定手段は、前記第2の撮影画像で認識された物体を囲む第2のバウンディングボックスと、前記射影変換された前記第1のバウンディングボックスとの重複率に基づいて判定を行うことを特徴とする請求項1に記載の情報処理装置。
【請求項3】
前記判定手段は、前記重複率が閾値以上である場合に、前記第1の撮影画像及び前記第2の撮影画像の間に同一の物体が存在すると判定することを特徴とする請求項2に記載の情報処理装置。
【請求項4】
前記距離取得手段は、前記第1の撮影画像における前記第1のバウンディングボックス、及び、前記第2の撮影画像における前記第2のバウンディングボックスのうち、信頼度が高い方の撮影画像におけるバウンディングボックスの所定の位置に基づいて、前記距離情報を取得することを特徴とする請求項2に記載の情報処理装置。
【請求項5】
前記所定の位置は、前記バウンディングボックスを構成する下辺の位置であることを特徴とする請求項4に記載の情報処理装置。
【請求項6】
前記第1のカメラは、前記情報処理装置を備える自律車両の前方に配置され、前記自律車両の前方を撮影するカメラであり、
前記第2のカメラは、前記自律車両の左側方又は右側方に配置され、前記自律車両の左斜め前方又は右斜め前方を撮影する撮影カメラであり、
前記第1の撮影画像から認識された物体の第1の信頼度よりも前記第2の撮影画像から認識された物体の第2の信頼度の方が高い場合、前記第2の撮影画像で認識された物体を囲む第2のバウンディングボックスを前記第1の撮影画像上に射影変換する第2の変換手段をさらに備え、
前記距離取得手段は、前記射影変換された前記第2のバウンディングボックスの所定の位置に基づいて前記距離情報を取得することを特徴とする請求項1に記載の情報処理装置。
【請求項7】
前記第1の撮影画像では物体の一部が認識されておらず、前記第2の撮影画像では物体の全体が認識されていることを特徴とする請求項6に記載の情報処理装置。
【請求項8】
前記所定の位置は、前記射影変換された前記第2のバウンディングボックスを構成する下辺の位置であることを特徴とする請求項6に記載の情報処理装置。
【請求項9】
前記第1のカメラは、前記情報処理装置を備える自律車両の後方に配置され、前記自律車両の後方を撮影するカメラであり、
前記第2のカメラは、前記自律車両の左側方又は右側方に配置され、前記自律車両の左斜め後方又は右斜め後方を撮影する撮影カメラであり、
前記第1の撮影画像から認識された物体の第1の信頼度よりも前記第2の撮影画像から認識された物体の第2の信頼度の方が高い場合、前記第2の撮影画像で認識された物体を囲む第2のバウンディングボックスを前記第1の撮影画像上に射影変換する第2の変換手段をさらに備え、
前記距離取得手段は、前記射影変換された前記第2のバウンディングボックスの所定の位置に基づいて前記距離情報を取得することを特徴とする請求項1に記載の情報処理装置。
【請求項10】
前記第1の撮影画像では物体の一部が認識されておらず、前記第2の撮影画像では物体の全体が認識されていることを特徴とする請求項9に記載の情報処理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報処理装置、自律車両、情報処理装置の制御方法、プログラム及び記憶媒体に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1は、撮影画像に含まれるマーカと、自律作業機から当該マーカまでの距離情報と予めを対応付けて記憶しておき、ある撮影画像で検出されたマーカの距離情報を取得することを開示している。
【先行技術文献】
【特許文献】
【0003】
国際公開第2021/014585号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の技術では、遮蔽物の存在によりマーカの一部又は全部が隠れてしまうとマーカを十分に認識することができず、結果として、距離情報が取得できなかったり、誤った距離情報を取得してしまったりすることがある。
【0005】
本発明は、上記の課題に鑑みてなされたものであり、物体までの距離を精度よく取得するための技術を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記の目的を達成する本発明の一態様による情報処理装置は、
第1のカメラの第1の撮影画像と第2のカメラの第2の撮影画像とを取得する画像取得手段と、
前記第1の撮影画像及び前記第2の撮影画像からそれぞれ物体を認識する物体認識手段と、
前記物体が当該物体である確からしさを示す信頼度を、前記第1の撮影画像及び前記第2の撮影画像のそれぞれについて算出する信頼度算出手段と、
前記第1の撮影画像及び前記第2の撮影画像の間に同一の物体が存在するかどうかを判定する判定手段と、
前記判定手段により同一の物体が存在すると判定された場合、前記信頼度算出手段により算出された信頼度が高い方の撮影画像に対する前記物体認識手段の物体認識結果に基づいて、前記物体までの距離情報を取得する距離取得手段と、
を備えることを特徴とする。
【発明の効果】
【0007】
本発明によれば、物体までの距離を精度よく取得することが可能となる。
【図面の簡単な説明】
【0008】
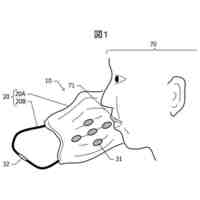
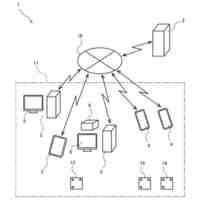
一実施形態に係る自律車両の俯瞰図である。
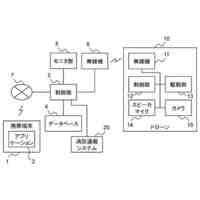
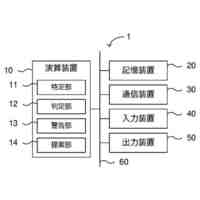
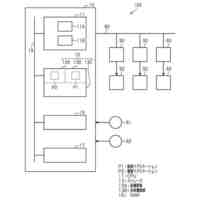
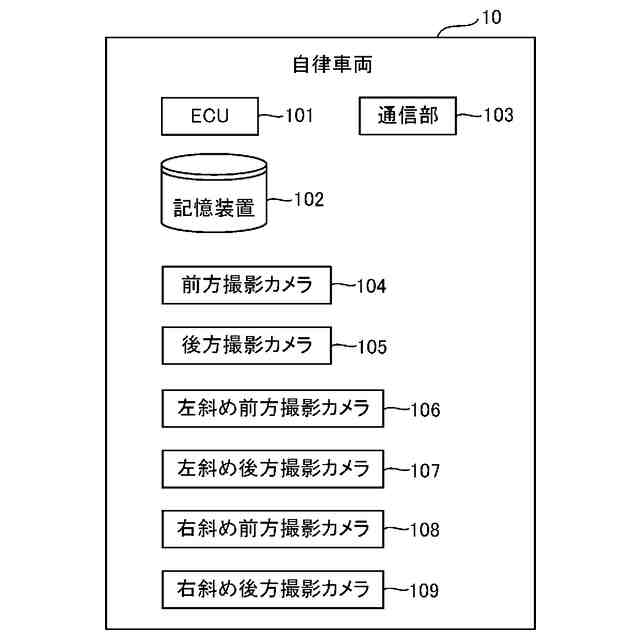
一実施形態に係る自律車両のハードウェア構成の一例を示す図である。
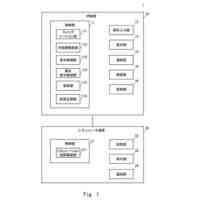
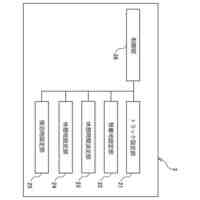
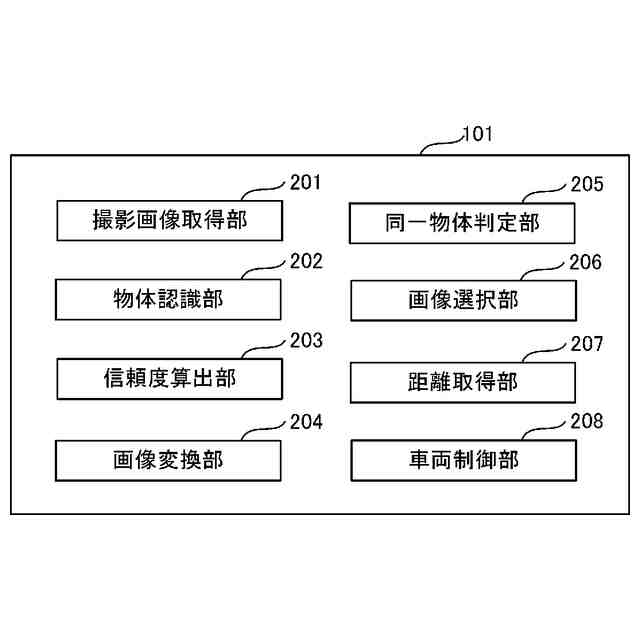
一実施形態に係る自律車両が備える情報処理装置(ECU)の機能構成の一例を示す図である。
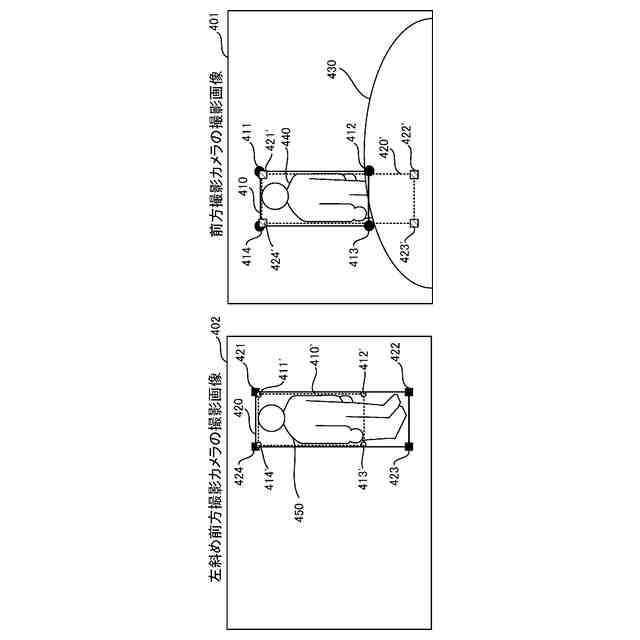
一実施形態に係る撮影画像間の画像変換の説明図である。
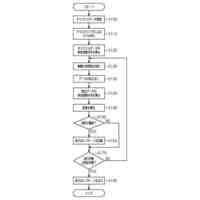
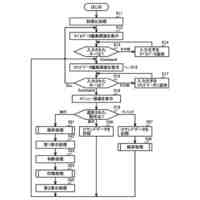
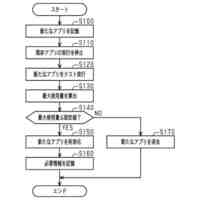
一実施形態に係る情報処理装置が実施する処理の手順を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、添付図面を参照して実施形態を詳しく説明する。なお、以下の実施形態は特許請求の範囲に係る発明を限定するものではなく、また実施形態で説明されている特徴の組み合わせの全てが発明に必須のものとは限らない。実施形態で説明されている複数の特徴のうち二つ以上の特徴は任意に組み合わされてもよい。また、同一若しくは同様の構成には同一の参照番号を付し、重複した説明は省略する。
【0010】
<自律車両の俯瞰図>
図1は、本実施形態に係る自律車両の俯瞰図の一例を示す。本実施形態では、周囲の状況を認識し、認識結果に基づいて自律的に車両を制御する自動運転を行う車両を例に説明を行う。自律車両は、自律的に動作する移動体であればどのような形態であってもよいが、例えば三輪車、四輪車などである。本実施形態では、1名以上の乗員が乗車可能な四輪車(電動車両)、例えばマイクロモビリティである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
非正規コート
4日前
個人
人物再現システム
1日前
有限会社ノア
データ読取装置
2日前
個人
広告提供システムおよびその方法
4日前
株式会社ザメディア
出席管理システム
9日前
個人
日誌作成支援システム
1日前
株式会社タクテック
商品取出集品システム
8日前
個人
ポイント還元付き配送システム
2日前
ミサワホーム株式会社
情報処理装置
8日前
トヨタ自動車株式会社
工程計画装置
9日前
トヨタ自動車株式会社
作業判定方法
10日前
オベック実業株式会社
接続構造
1日前
株式会社村田製作所
動き検知装置
8日前
トヨタ自動車株式会社
情報処理システム
10日前
株式会社国際電気
支援システム
11日前
トヨタ自動車株式会社
情報処理方法
10日前
個人
コンテンツ配信システム
8日前
株式会社実身美
ワーキングシェアリングシステム
2日前
株式会社ドクター中松創研
生成AIの適切使用法
1日前
株式会社エスシーシー
置き配システム
2日前
個人
プラットフォームシステム
8日前
ブラザー工業株式会社
ラベルプリンタ
10日前
株式会社知財事業研究所
運行計画作成システム
8日前
株式会社 喜・扇
緊急事態対応円滑化システム
1日前
トヨタ自動車株式会社
作業支援システム
8日前
個人
注文管理システム及び注文管理プログラム
1日前
株式会社K-model
運用設計資料作成装置
4日前
株式会社マーケットヴィジョン
情報処理システム
1日前
トヨタ自動車株式会社
情報処理装置
1日前
株式会社日立製作所
設計支援装置
9日前
日立建機株式会社
潤滑油診断システム
9日前
株式会社日立製作所
タスク管理システム
8日前
三菱ケミカル株式会社
芯鞘複合導電繊維および繊維集合体
1日前
株式会社けんさんぎふと
カタログギフトの管理装置
4日前
トヨタ自動車株式会社
車両用の情報処理装置
10日前
トヨタ自動車株式会社
車両用の情報処理装置
9日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ