TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025057842
公報種別
公開特許公報(A)
公開日
2025-04-09
出願番号
2023167627
出願日
2023-09-28
発明の名称
情報処理装置、情報処理方法、コンピュータプログラム、及び記憶媒体
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20250402BHJP(制御;調整)
要約
【課題】
障害物を検出した場合に、迅速かつ適切に対応可能な情報処理装置を提供する。
【解決手段】
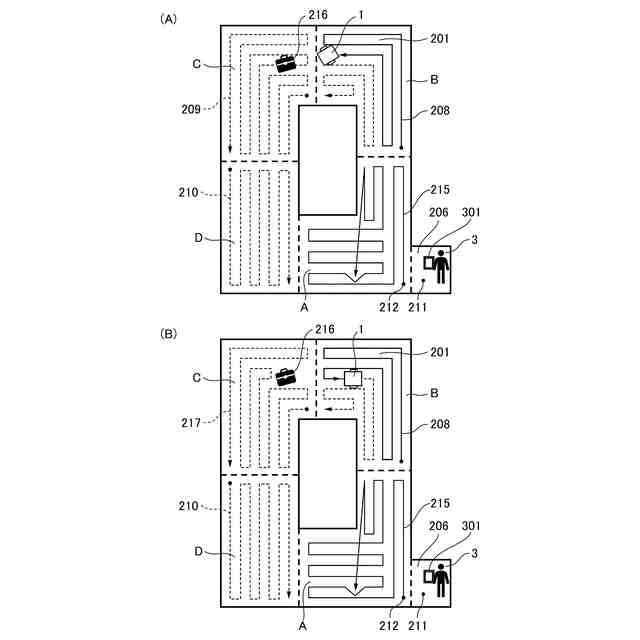
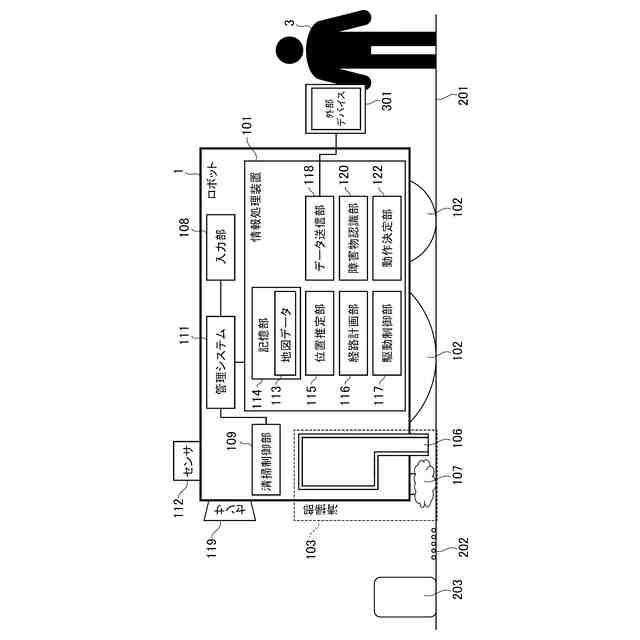
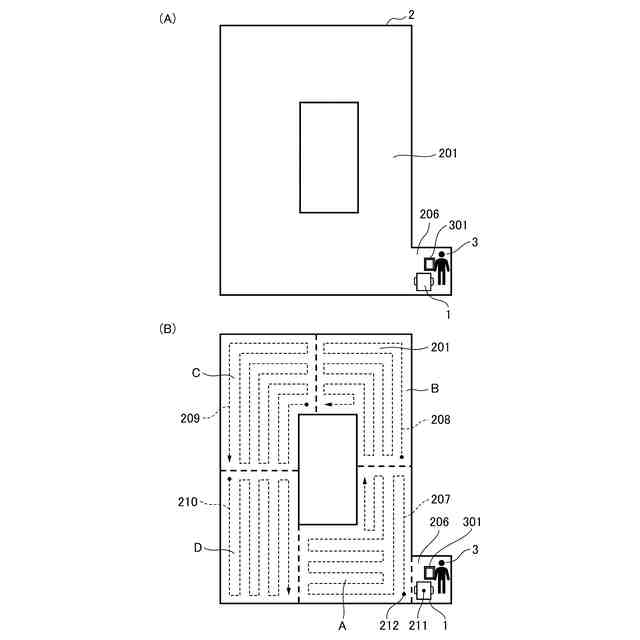
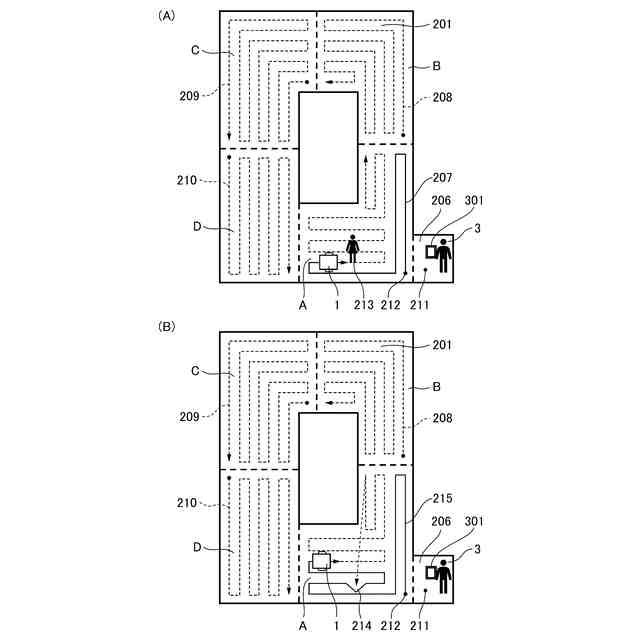
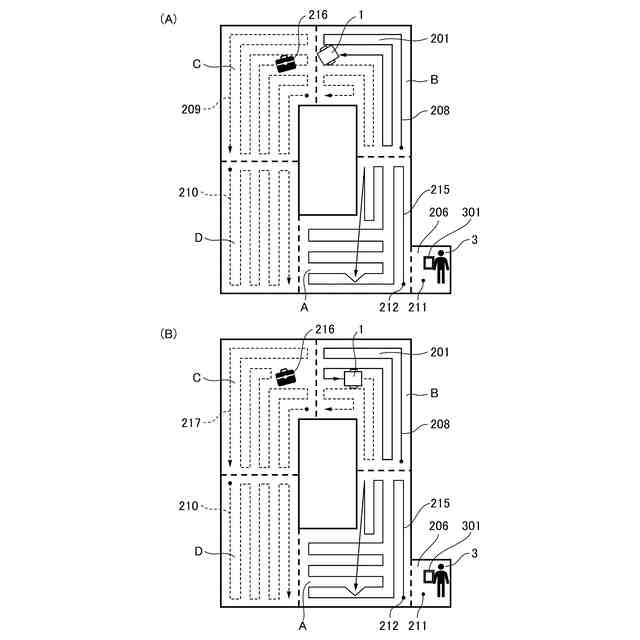
情報処理装置において、複数の分割領域を含む作業領域のうち、第1の分割領域を移動体が移動するための第1の経路に関する情報を取得する取得部と、前記取得部が取得した情報に基づいて、前記移動体の移動を制御する制御部と、前記移動体が前記第1の経路に基づく移動中に、前記移動体に配置されたセンサにより前記第1の分割領域とは異なる第2の分割領域に所定の物体が検出された場合に、前記所定の物体に関する物体情報を、外部装置に出力する出力部と、を備えることを特徴とする。
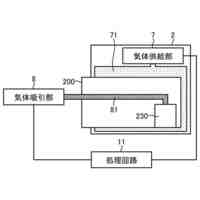
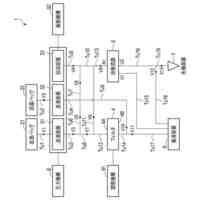
【選択図】 図7
特許請求の範囲
【請求項1】
複数の分割領域を含む作業領域のうち、第1の分割領域を移動体が移動するための第1の経路に関する情報を取得する取得部と、
前記取得部が取得した情報に基づいて、前記移動体の移動を制御する制御部と、
前記移動体が前記第1の経路に基づく移動中に、前記移動体に配置されたセンサにより前記第1の分割領域とは異なる第2の分割領域に所定の物体が検出された場合に、前記所定の物体に関する物体情報を、外部装置に出力する出力部と、
を備えることを特徴とする情報処理装置。
続きを表示(約 1,300 文字)
【請求項2】
前記取得部は、前記第2の分割領域を前記移動体が移動するための第2の経路を更に取得し、
前記所定の物体は、前記移動体が前記第2の経路に基づく移動に伴い実行する所定の作業を妨げる可能性がある物体である、
ことを特徴とする請求項1に記載の情報処理装置。
【請求項3】
前記取得部は、前記物体情報に基づいて前記第2の経路が変更された第3の経路を取得する、ことを特徴とする請求項1に記載の情報処理装置。
【請求項4】
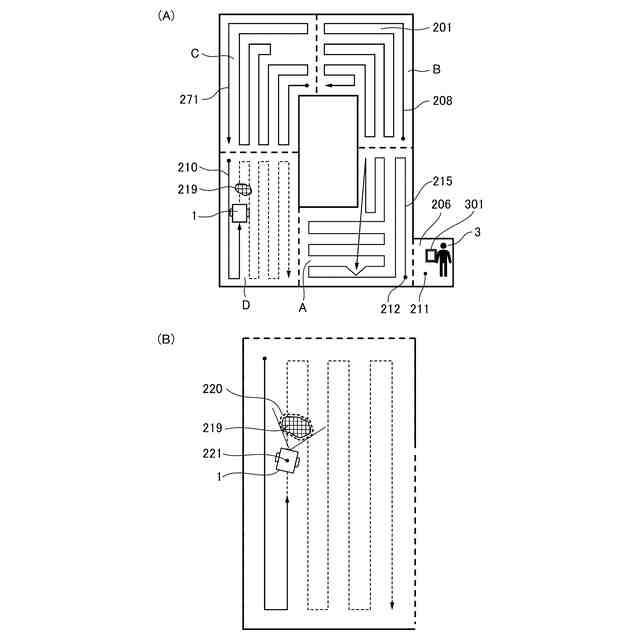
前記取得部は、前記所定の物体が液体の場合に、前記液体が存在する領域を回避可能な前記第3の経路を取得する、ことを特徴とする請求項3に記載の情報処理装置。
【請求項5】
前記制御部は、前記第3の経路に基づく移動が終了したあとに、前記センサによって前記所定の物体の全体を検出できる位置に、前記移動体を移動させる、ことを特徴とする請求項3に記載の情報処理装置。
【請求項6】
前記物体情報は、前記物体の種類、位置、大きさの少なくとも1つを含む、ことを特徴とする請求項1に記載の情報処理装置。
【請求項7】
複数の分割領域を含む作業領域のうち、第1の分割領域を移動体が移動するための第1の経路に関する情報を取得する取得ステップと、
前記取得ステップが取得した情報に基づいて、前記移動体の移動を制御する制御ステップと、
前記移動体が前記第1の経路に基づく移動中に、前記移動体に配置されたセンサにより前記第1の分割領域とは異なる第2の分割領域に所定の物体が検出された場合に、前記所定の物体に関する物体情報を、外部装置に出力する出力ステップと、
を備えることを特徴とする情報処理方法。
【請求項8】
複数の分割領域を含む作業領域のうち、第1の分割領域を移動体が移動するための第1の経路に関する情報を取得する取得ステップと、
前記取得ステップが取得した情報に基づいて、前記移動体の移動を制御する制御ステップと、
前記移動体が前記第1の経路に基づく移動中に、前記移動体に配置されたセンサにより前記第1の分割領域とは異なる第2の分割領域に所定の物体が検出された場合に、前記所定の物体に関する物体情報を、外部装置に出力する出力ステップと、
をコンピュータにより制御させるためのコンピュータプログラム。
【請求項9】
複数の分割領域を含む作業領域のうち、第1の分割領域を移動体が移動するための第1の経路に関する情報を取得する取得ステップと、
前記取得ステップが取得した情報に基づいて、前記移動体の移動を制御する制御ステップと、
前記移動体が前記第1の経路に基づく移動中に、前記移動体に配置されたセンサにより前記第1の分割領域とは異なる第2の分割領域に所定の物体が検出された場合に、前記所定の物体に関する物体情報を、外部装置に出力する出力ステップと、
をコンピュータにより制御させるためのコンピュータプログラムを記憶した記憶媒体。
発明の詳細な説明
【技術分野】
【0001】
本発明は情報処理装置、情報処理方法、コンピュータプログラム、及び記憶媒体等に関するものである。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
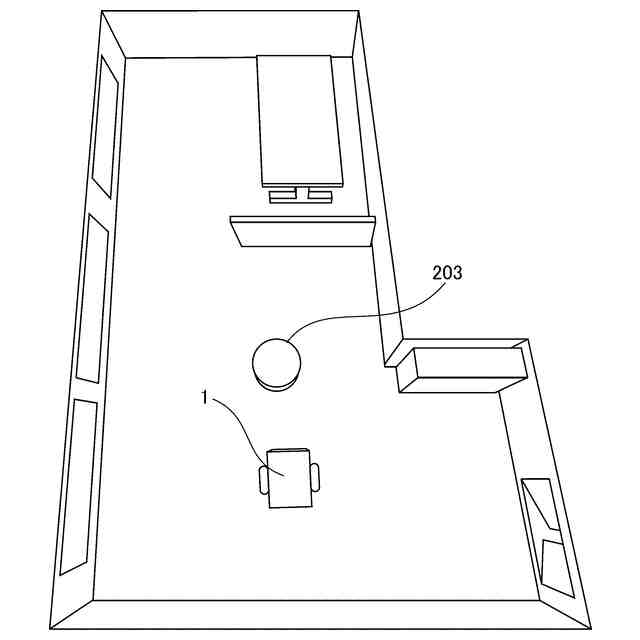
自律的に走行するサービスロボットのなかには、実空間内の所定の領域で決められた作業を行う種類のものがある。例えば清掃ロボットは、ユーザが清掃して欲しい床面領域を予め設定し作業開始指示を行うと、対象となる床面領域を、清掃動作を行いながら自律走行する。
【0003】
一般に自律走行システムが所定の領域で決められた作業を行うために走行する場合、予め準備した環境地図データを用いて走行経路を生成し、ロボットに搭載した各種センサを用いて実空間を把握する。そして、環境地図データとセンサによって把握した実空間を照合して自己位置を導出することで、確実に経路追跡することが可能になる。
【0004】
環境地図データは公知のSLAM(Simultaneous Localization and Mapping)技術を用いて作成する場合がある。
【0005】
ところで清掃ロボットは、一般家屋や商業施設や公共施設など、人が滞在する空間で作業する場合がある。その場合、環境地図データに表現されていない障害物に対応する必要がある。
【0006】
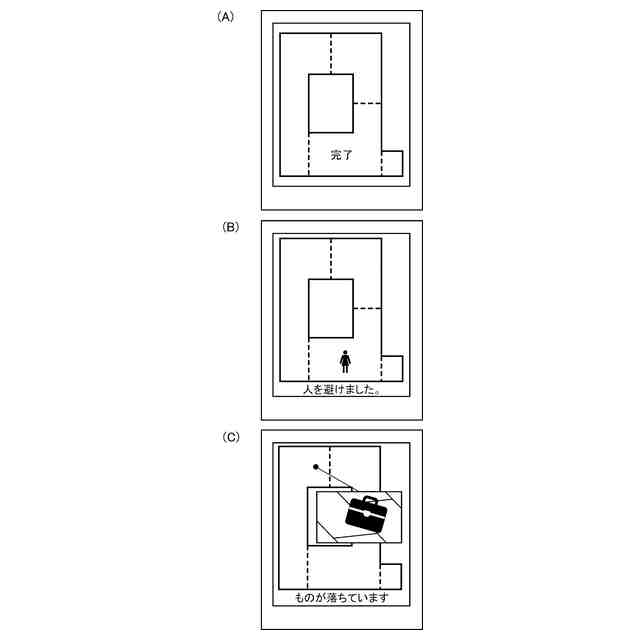
例えば清掃ロボットの前に人が立っている場合や、清掃ロボットの移動を妨げるような障害物が存在する場合などである。従来、例えば特許文献1には、清掃ロボットに搭載したカメラで障害物の画像を取得し、ユーザ入力デバイスから障害物迂回行動を指示する技術が記載されている。
【0007】
この場合、例えば清掃ロボットの前に人が立っていた場合は、時間が経過すれば人が立ち去っている可能性があり、迂回した場所を清掃ロボットが清掃できることとなる。
【0008】
一方で、例えば障害物として、落とし物を検出した場合は、清掃ロボットでは対処することが出来ない場合があり、その場合はユーザが拾いに行く必要がある。また例えば液体がこぼれていた場合は、ユーザか清掃ロボットが後で拭きに行く必要がある。このように清掃作業が未達成な場所に対して、特許文献2では、特にゴミの取り残し量が多い場所を再清掃する技術が記載されている。
【先行技術文献】
【特許文献】
【0009】
特表2022-549572号公報
特開2017-29249号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかしながら、従来の清掃ロボットは、例えば所定の領域の境界近くを走行し清掃作業しているときに、隣接する領域の障害物などを検出したとしても速やかに対応することができなかった。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
トナー
2日前
キヤノン株式会社
トナー
2日前
キヤノン株式会社
トナー
2日前
キヤノン株式会社
トナー
2日前
キヤノン株式会社
定着装置
2日前
キヤノン株式会社
撮像装置
2日前
キヤノン株式会社
培養装置
2日前
キヤノン株式会社
培養装置
2日前
キヤノン株式会社
培養装置
2日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
培養システム
2日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
液体吐出装置
3日前
キヤノン株式会社
培養システム
2日前
キヤノン株式会社
画像読取装置
2日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
シート積載装置
2日前
キヤノン株式会社
シート搬送装置
2日前
キヤノン株式会社
シート搬送装置
2日前
キヤノン株式会社
分離装置及び分離方法
2日前
キヤノン株式会社
インクジェット記録方法
2日前
キヤノン株式会社
インクジェット記録方法
2日前
キヤノン株式会社
電子機器およびその制御方法
2日前
キヤノン株式会社
粒子分離装置及び粒子分離方法
2日前
キヤノン株式会社
電子機器及び回転操作ユニット
2日前
キヤノン株式会社
撮像装置、撮像装置の制御方法
2日前
キヤノン株式会社
記録装置、記録装置の制御方法
2日前
キヤノン株式会社
画像形成装置及びカートリッジ
2日前
キヤノン株式会社
記録装置、記録装置の制御方法
2日前
キヤノン株式会社
細胞作製装置及び細胞回収方法
2日前
キヤノン株式会社
画像記録装置および画像記録方法
2日前
キヤノン株式会社
放射線撮影装置及び放射線検出器
2日前
キヤノン株式会社
ワークフローシステム、及び方法
3日前
キヤノン株式会社
光電変換装置、移動体および機器
2日前
キヤノン株式会社
液体吐出ヘッドおよび液体吐出装置
2日前
キヤノン株式会社
光学装置及びそれを有する撮影装置
2日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ