TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025055175
公報種別
公開特許公報(A)
公開日
2025-04-08
出願番号
2023164457
出願日
2023-09-27
発明の名称
部品実装装置及び部品実装方法
出願人
JUKI株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
H05K
13/04 20060101AFI20250401BHJP(他に分類されない電気技術)
要約
【課題】リード部品のリードを基板の孔に円滑に挿入すること。
【解決手段】部品実装装置は、リード部品のボディを保持した状態で、基板の表面に平行な平面方向及び基板の表面に直交する法線方向のそれぞれに移動可能な保持部材と、ボディが保持部材に保持された状態で、リード部品の複数のリードのそれぞれの3次元形状を計測する3次元計測装置と、平面方向における複数のリードの座標の平均値を制御点とした場合、3次元形状を示す3次元データに基づいて、法線方向の複数の位置のそれぞれの制御点を算出する算出部と、基板に設けられている複数の孔の位置データと、複数の制御点とに基づいて、複数のリードのそれぞれが複数の孔のそれぞれに挿入されるように、ボディを保持した保持部材を移動させる制御部と、を備える。
【選択図】図11
特許請求の範囲
【請求項1】
リード部品のボディを保持した状態で、基板の表面に平行な平面方向及び前記基板の表面に直交する法線方向のそれぞれに移動可能な保持部材と、
前記ボディが前記保持部材に保持された状態で、前記リード部品の複数のリードのそれぞれの3次元形状を計測する3次元計測装置と、
前記平面方向における複数の前記リードの座標の平均値を制御点とした場合、前記3次元形状を示す3次元データに基づいて、前記法線方向の複数の位置のそれぞれの前記制御点を算出する算出部と、
前記基板に設けられている複数の孔の位置データと、複数の前記制御点とに基づいて、複数の前記リードのそれぞれが複数の前記孔のそれぞれに挿入されるように、前記ボディを保持した前記保持部材を移動させる制御部と、を備える、
部品実装装置。
続きを表示(約 1,800 文字)
【請求項2】
複数の前記制御点に基づいて、前記リードの挿入方向を決定する決定部を備え、
前記制御部は、前記リードの先端部が前記孔に挿入された後、前記保持部材を前記挿入方向に移動させる、
請求項1に記載の部品実装装置。
【請求項3】
前記制御点は、前記リードの先端部の制御点を示す第1制御点と、前記先端部よりも前記ボディに近い前記リードの中間部又は基端部の制御点を示す第2制御点と、を含む、
請求項1に記載の部品実装装置。
【請求項4】
前記保持部材は、前記平面方向における前記ボディの中心を保持し、
前記算出部は、前記保持部材の位置と前記第1制御点と前記リードの長さとに基づいて、前記先端部よりも前記ボディに近い前記リードの中間部又は基端部の制御点を示す第3制御点を算出する、
請求項3に記載の部品実装装置。
【請求項5】
基板の表面に平行な平面方向におけるリード部品のボディの中心を保持した状態で、前記平面方向及び前記基板の表面に直交する法線方向のそれぞれに移動可能な保持部材と、
前記ボディの中心が前記保持部材に保持された状態で、前記リード部品の複数のリードのそれぞれの3次元形状を計測する3次元計測装置と、
前記平面方向における複数の前記リードの座標の平均値を制御点とした場合、前記3次元形状を示す3次元データに基づいて、前記リードの先端部の制御点を示す第1制御点を算出し、前記保持部材の位置と前記第1制御点と前記リードの長さとに基づいて、前記先端部よりも前記ボディに近い前記リードの中間部又は基端部の制御点を示す第2制御点を算出する算出部と、
前記基板に設けられている複数の孔の位置データと、前記第1制御点及び前記第2制御点とに基づいて、複数の前記リードのそれぞれが複数の前記孔のそれぞれに挿入されるように、前記ボディの中心を保持した前記保持部材を移動させる制御部と、を備える、
部品実装装置。
【請求項6】
前記第1制御点と前記第2制御点とに基づいて、前記リードの挿入方向を決定する決定部を備え、
前記制御部は、前記リードの先端部が前記孔に挿入された後、前記保持部材を前記挿入方向に移動させる、
請求項5に記載の部品実装装置。
【請求項7】
基板の表面に平行な平面方向及び前記基板の表面に直交する法線方向のそれぞれに移動可能な保持部材で、リード部品のボディを保持することと、
前記ボディが前記保持部材に保持された状態で、前記リード部品の複数のリードのそれぞれの3次元形状を計測することと、
前記平面方向における複数の前記リードの座標の平均値を制御点とした場合、前記3次元形状を示す3次元データに基づいて、前記法線方向の複数の位置のそれぞれの前記制御点を算出することと、
前記基板に設けられている複数の孔の位置データと、複数の前記制御点とに基づいて、複数の前記リードのそれぞれが複数の前記孔のそれぞれに挿入されるように、前記ボディを保持した前記保持部材を移動させることと、を含む、
部品実装方法。
【請求項8】
基板の表面に平行な平面方向及び前記基板の表面に直交する法線方向のそれぞれに移動可能な保持部材で、前記平面方向におけるリード部品のボディの中心を保持することと、
前記ボディの中心が前記保持部材に保持された状態で、前記リード部品の複数のリードのそれぞれの3次元形状を計測することと、
前記平面方向における複数の前記リードの座標の平均値を制御点とした場合、前記3次元形状を示す3次元データに基づいて、前記リードの先端部の制御点を示す第1制御点を算出することと、
前記保持部材の位置と前記第1制御点と前記リードの長さとに基づいて、前記先端部よりも前記ボディに近い前記リードの中間部又は基端部の制御点を示す第2制御点を算出することと、
前記基板に設けられている複数の孔の位置データと、前記第1制御点及び前記第2制御点とに基づいて、複数の前記リードのそれぞれが複数の前記孔のそれぞれに挿入されるように、前記ボディの中心を保持した前記保持部材を移動させることと、を含む、
部品実装方法。
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術は、部品実装装置及び部品実装方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
電子機器の生産において、部品を基板に実装する部品実装装置が使用される。特許文献1には、リード部品を基板に実装する部品実装装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2021-093560号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
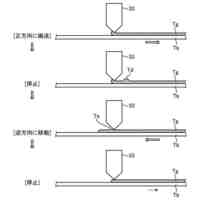
リード部品のリードが基板の孔に挿入されることによって、リード部品が基板に実装される。リードが曲がっている場合、リードの先端部が基板の孔に挿入されても、リードがリードの基端部まで基板の孔に挿入されるようにリード部品が基板に押し込まれた場合、リードの中間部又は基端部が基板の孔の内面に強い力で接触する可能性がある。リードの中間部又は基端部が基板の孔の内面から強い力を受けて、リードに掛かる負荷が大きくなると、リード部品の品質が低下する可能性がある。
【0005】
本明細書で開示する技術は、リード部品のリードを基板の孔に円滑に挿入することを目的とする。
【課題を解決するための手段】
【0006】
本明細書は、部品実装装置を開示する。部品実装装置は、リード部品のボディを保持した状態で、基板の表面に平行な平面方向及び基板の表面に直交する法線方向のそれぞれに移動可能な保持部材と、ボディが保持部材に保持された状態で、リード部品の複数のリードのそれぞれの3次元形状を計測する3次元計測装置と、平面方向における複数のリードの座標の平均値を制御点とした場合、3次元形状を示す3次元データに基づいて、法線方向の複数の位置のそれぞれの制御点を算出する算出部と、基板に設けられている複数の孔の位置データと、複数の制御点とに基づいて、複数のリードのそれぞれが複数の孔のそれぞれに挿入されるように、ボディを保持した保持部材を移動させる制御部と、を備える。
【発明の効果】
【0007】
本明細書で開示する部品実装装置によれば、リード部品のリードが基板の孔に円滑に挿入される。
【図面の簡単な説明】
【0008】
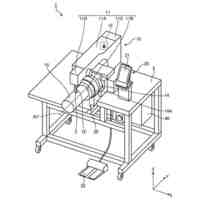
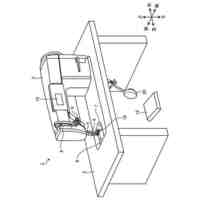
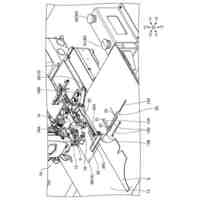
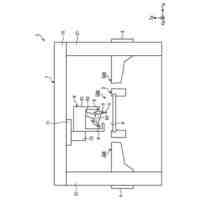
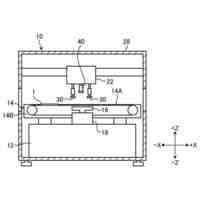
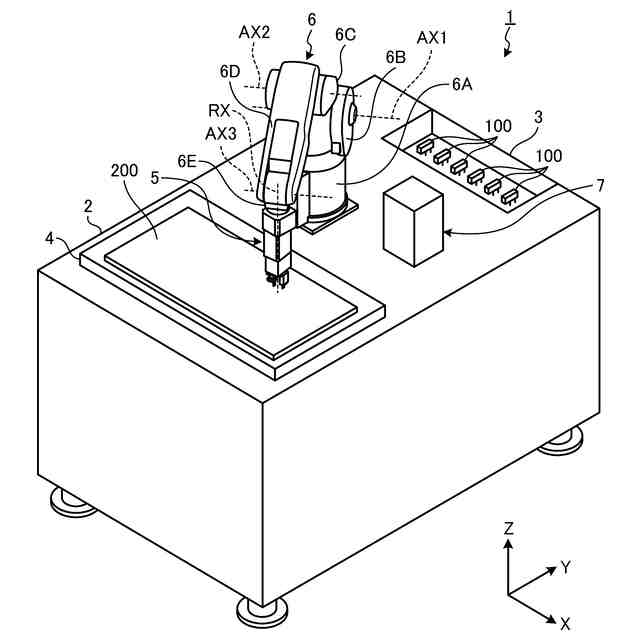
図1は、第1実施形態に係る部品実装装置を示す斜視図である。
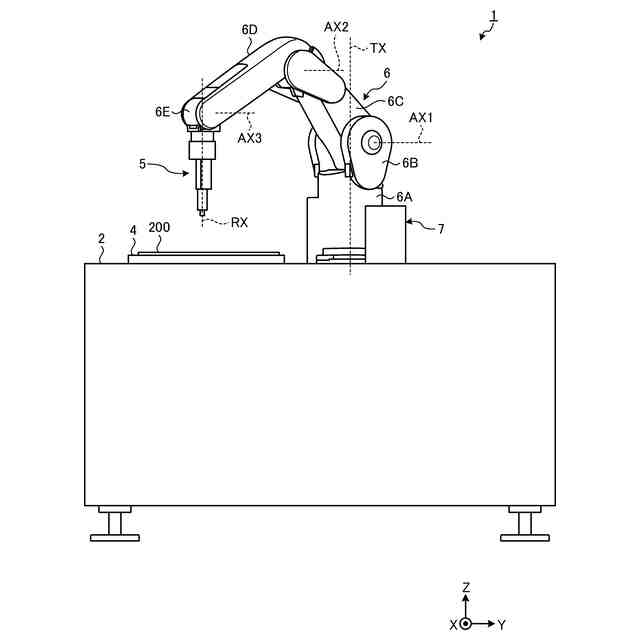
図2は、第1実施形態に係る部品実装装置を示す側面図である。
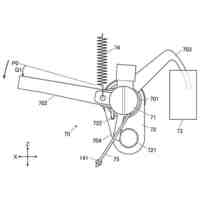
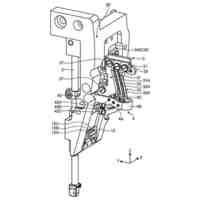
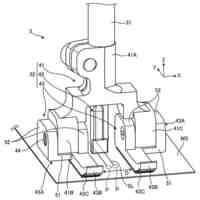
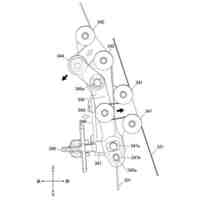
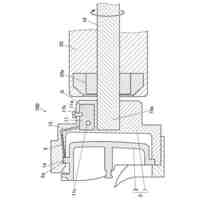
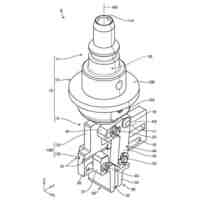
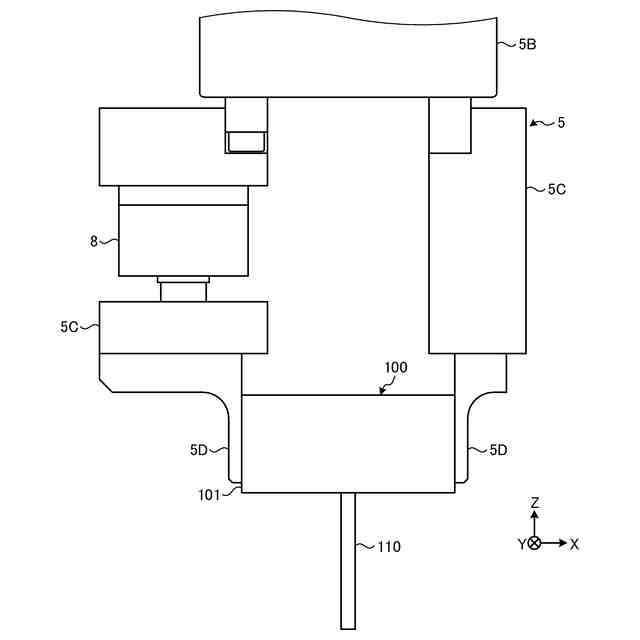
図3は、第1実施形態に係るロボットハンドを示す斜視図である。
図4は、第1実施形態に係るロボットハンドに保持されたリード部品を示す側面図である。
図5は、第1実施形態に係るリード部品を下方から見た図である。
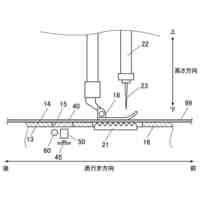
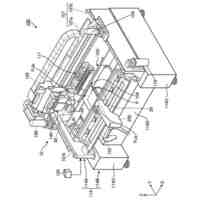
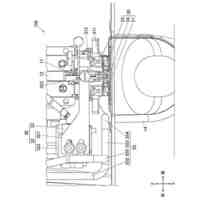
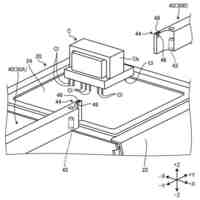
図6は、第1実施形態に係る3次元計測装置を示す斜視図である。
図7は、第1実施形態に係るロボットマニピュレータの動作を説明するための図である。
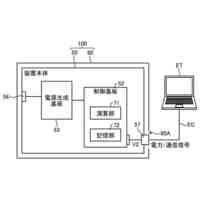
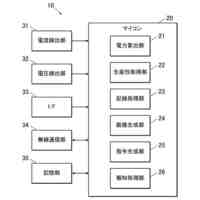
図8は、第1実施形態に係る制御装置を示すハードウエア構成図である。
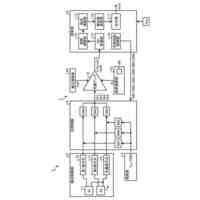
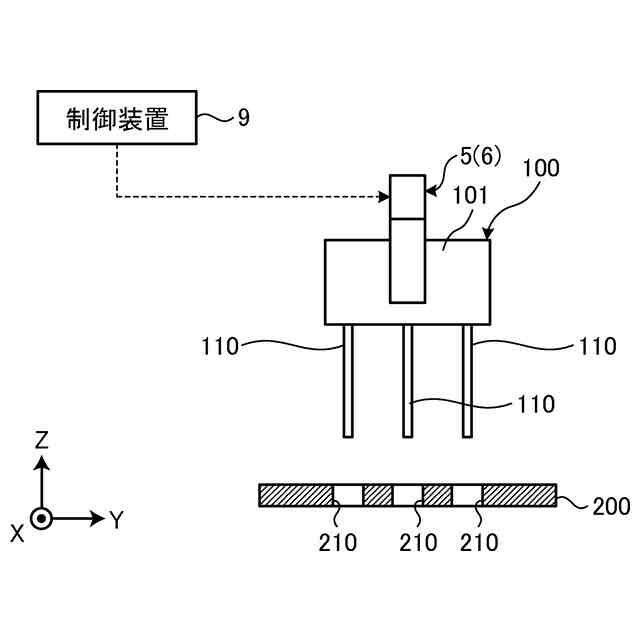
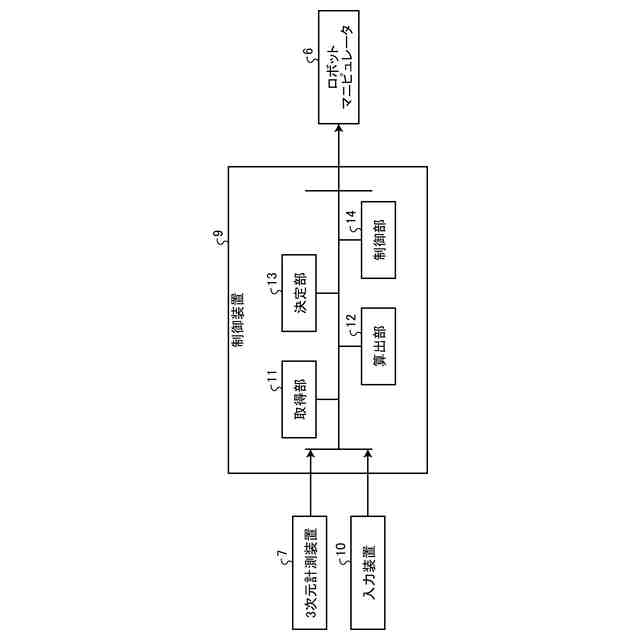
図9は、第1実施形態に係る部品実装装置を示すブロック図である。
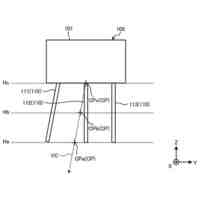
図10は、第1実施形態に係る制御点を説明するための図である。
図11は、第1実施形態に係る制御点を説明するための図である。
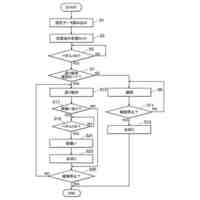
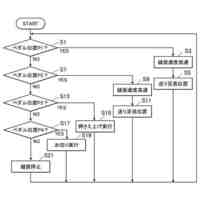
図12は、第1実施形態に係る部品実装方法を示すフローチャートである。
図13は、第1実施形態に係る部品実装方法を説明するための図である。
図14は、第2実施形態に係る制御点の算出方法を説明するための図である。
図15は、第2実施形態に係る部品実装方法を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、本開示に係る実施形態について図面を参照しながら説明するが、本開示は実施形態に限定されない。以下で説明する実施形態の構成要素は、適宜組み合わせることができる。また、一部の構成要素を用いない場合もある。
【0010】
実施形態においては、部品実装装置1にローカル座標系を設定し、ローカル座標系を参照しながら各部の位置関係について説明する。ローカル座標系として、XYZ直交座標系を設定する。所定面においてX軸に平行な方向をX軸方向とする。所定面においてX軸と直交するY軸に平行な方向をY軸方向とする。X軸及びY軸のそれぞれと直交するZ軸に平行な方向をZ軸方向とする。X軸を中心とする回転方向又は傾斜方向をθX方向とする。Y軸を中心とする回転方向又は傾斜方向をθY方向とする。Z軸を中心とする回転方向又は傾斜方向をθZ方向とする。所定面は、XY平面である。Z軸は、所定面と直交する。実施形態において、所定面は、水平面に平行であることとする。Z軸方向は、鉛直方向である。なお、所定面が水平面に対して傾斜していてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
JUKI株式会社
ミシン
25日前
JUKI株式会社
ミシン
20日前
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン
2か月前
JUKI株式会社
ミシン
3か月前
JUKI株式会社
ミシン
2か月前
JUKI株式会社
ミシン
2か月前
JUKI株式会社
ミシン
2か月前
JUKI株式会社
ミシン機構
3か月前
JUKI株式会社
基板作業装置
19日前
JUKI株式会社
部品実装装置
19日前
JUKI株式会社
縫製システム
2か月前
JUKI株式会社
差動送りミシン
1か月前
JUKI株式会社
ミシン制御装置
2か月前
JUKI株式会社
上下送りミシン
19日前
JUKI株式会社
ボンディング装置
18日前
JUKI株式会社
ボンディング装置
18日前
JUKI株式会社
ミシンの糸切り装置
20日前
JUKI株式会社
縁かがり縫いミシン
3か月前
JUKI株式会社
ボタン付け縫製装置
1か月前
JUKI株式会社
ミシン及び縫製方法
3か月前
JUKI株式会社
縁かがり縫いミシン
1か月前
JUKI株式会社
磁気検出回路及びミシン
19日前
JUKI株式会社
被縫製物の位置決め装置
18日前
JUKI株式会社
ミシンの消費電力分析装置
2か月前
JUKI株式会社
ミシン釜のグリース供給構造
1か月前
JUKI株式会社
ミシン釜のグリース供給構造
1か月前
JUKI株式会社
ミシン釜のグリース供給構造
1か月前
JUKI株式会社
リード矯正装置及び実装装置
20日前
JUKI株式会社
グリップ装置及び部品実装装置
1か月前
JUKI株式会社
部品実装装置及び部品実装方法
3か月前
JUKI株式会社
実装装置及び実装装置の制御方法
1か月前
JUKI株式会社
工業用ミシン及びユーザ認証方法
2か月前
JUKI株式会社
実装装置及び実装装置の制御方法
1か月前
JUKI株式会社
縫製管理システム及び縫製管理方法
2か月前
JUKI株式会社
縫製管理システム及び縫製管理方法
2か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ