TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025049765
公報種別
公開特許公報(A)
公開日
2025-04-04
出願番号
2023158149
出願日
2023-09-22
発明の名称
光モジュール
出願人
住友電気工業株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G01S
7/481 20060101AFI20250327BHJP(測定;試験)
要約
【課題】走査範囲の拡大に伴う走査歪みの影響を低減可能な光モジュールを提供する。
【解決手段】一実施形態に係る光モジュールは、光源部と、光源部から出力されたレーザ光を走査する走査部と、光源部および走査部が搭載される主面を有する支持部材と、光源部、走査部及び支持部材を収容するとともに、走査部によって走査されたレーザ光を出力する窓部を有する収容部とを備え、走査部は、走査ミラーと、走査ミラーを第1揺動軸の周りに駆動する駆動機構とを有し、第1平面は、走査ミラーが駆動停止されている状態において、走査ミラーに入射するレーザ光の光軸と、走査ミラーで反射したレーザ光の光軸を含む平面であり、第2平面は、走査ミラーが駆動停止されている状態において、第1平面と直交するとともに第1揺動軸を含む平面であり、走査ミラーは、第2平面に対して傾斜しておりレーザ光を反射する傾斜面を有する。
【選択図】図4
特許請求の範囲
【請求項1】
光源部と、
前記光源部から出力されたレーザ光を走査する走査部と、
前記光源部および前記走査部が搭載される主面を有する支持部材と、
前記光源部、前記走査部及び前記支持部材を収容するとともに、前記走査部によって走査された前記レーザ光を出力する窓部を有する収容部と、
を備え、
前記走査部は、
走査ミラーと、
前記走査ミラーを第1揺動軸の周りに駆動する駆動機構と、
を有し、
第1平面は、前記走査ミラーが駆動停止されている状態において、前記走査ミラーに入射する前記レーザ光の光軸と、前記走査ミラーによって反射された前記レーザ光の光軸を含む平面であり、
第2平面は、前記走査ミラーが駆動停止されている状態において、前記第1平面と直交するとともに前記第1揺動軸を含む平面であり、
前記走査ミラーは、前記第2平面に対して傾斜しており前記レーザ光を反射する傾斜面を有する、
光モジュール。
続きを表示(約 690 文字)
【請求項2】
前記走査ミラーは、前記第1揺動軸に沿って並列配置された複数の前記傾斜面を有する、
請求項1に記載の光モジュール。
【請求項3】
前記駆動機構は、前記第1揺動軸に直交する第2揺動軸の周りに前記走査ミラーを駆動可能に構成されている、
請求項1に記載の光モジュール。
【請求項4】
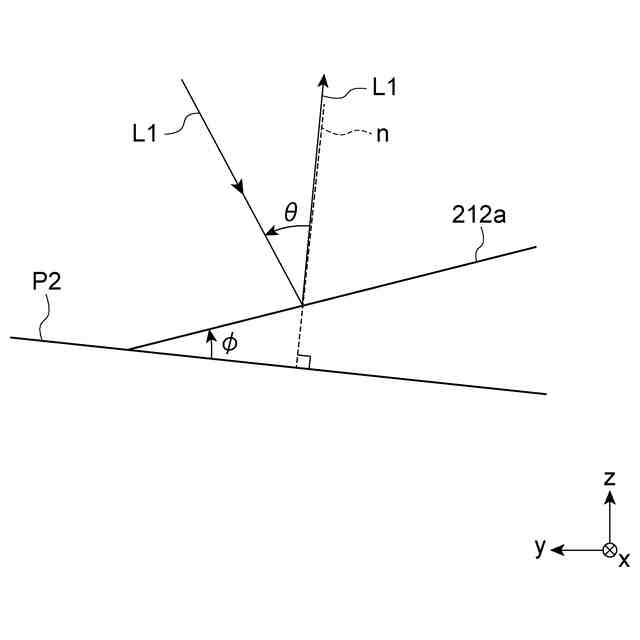
前記傾斜面に入射する前記レーザ光の前記第2平面の法線に対する角度をθ(°)とし、前記傾斜面の前記第2平面に対する傾斜角をφとしたとき、前記走査部は、前記走査ミラーが駆動停止されている状態において、前記φが式(1)を満たすように配置されている、
請求項1から請求項3のいずれか1項に記載の光モジュール。
φ(θ)=aθ
2
+bθ+c・・・(1)
式(1)において、a=-0.003032、b=0.796134、c=-0.879850である。
【請求項5】
前記走査ミラーが駆動停止されている状態において、前記第2平面は前記主面と傾斜して配置され、前記傾斜面は前記主面と平行に配置されている、
請求項1に記載の光モジュール。
【請求項6】
前記走査ミラーが駆動停止されている状態において、前記第2平面は前記主面と平行に配置されている、
請求項1に記載の光モジュール。
【請求項7】
前記走査ミラーが駆動停止されている状態において、前記第2平面と前記傾斜面は前記主面と傾斜して配置されている、
請求項1に記載の光モジュール。
発明の詳細な説明
【技術分野】
【0001】
本発明は、光モジュールに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
光モジュールとして、光源部から出力された光を、走査部で走査しながら出力する光モジュールが知られている(例えば、特許文献1から特許文献4)。上記走査部の例は、MEMS(Micro Electro Mechanical Systems)である。走査された光を出力する光モジュールは、描画装置、検知装置などに適用される。
【先行技術文献】
【特許文献】
【0003】
特開2004-170965号公報
国際公開第2018/101226号
特開2018-72097号公報
特開2018-91630号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
光を走査部で走査する場合、走査歪みが発生する。特に、走査範囲を広げた場合に、走査歪みの影響が大きくなり易い。
【0005】
本開示は、走査範囲の拡大に伴う走査歪みの影響を低減可能な光モジュールを提供することを目的とする。
【課題を解決するための手段】
【0006】
一実施形態に係る光モジュールは、光源部と、前記光源部から出力されたレーザ光を走査する走査部と、前記光源部および前記走査部が搭載される主面を有する支持部材と、 前記光源部、前記走査部及び前記支持部材を収容するとともに、前記走査部によって走査された前記レーザ光を出力する窓部を有する収容部と、を備え、前記走査部は、走査ミラーと、前記走査ミラーを第1揺動軸の周りに駆動する駆動機構と、を有し、第1平面は、前記走査ミラーが駆動停止されている状態において、前記走査ミラーに入射する前記レーザ光の光軸と、前記走査ミラーによって反射された前記レーザ光の光軸を含む平面であり、 第2平面は、前記走査ミラーが駆動停止されている状態において、前記第1平面と直交するとともに前記第1揺動軸を含む平面であり、前記走査ミラーは、前記第2平面に対して傾斜しており前記レーザ光を反射する傾斜面を有する。
【発明の効果】
【0007】
本開示によれば、走査範囲の拡大に伴う走査歪みの影響を低減可能な光モジュールを提供できる。
【図面の簡単な説明】
【0008】
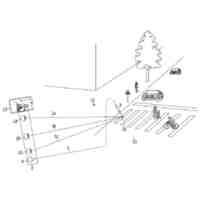
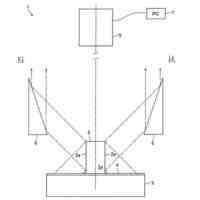
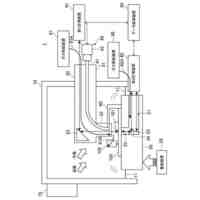
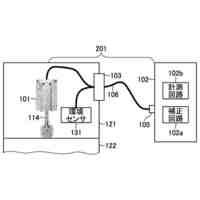
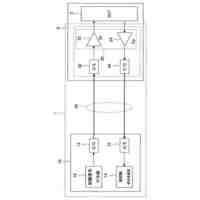
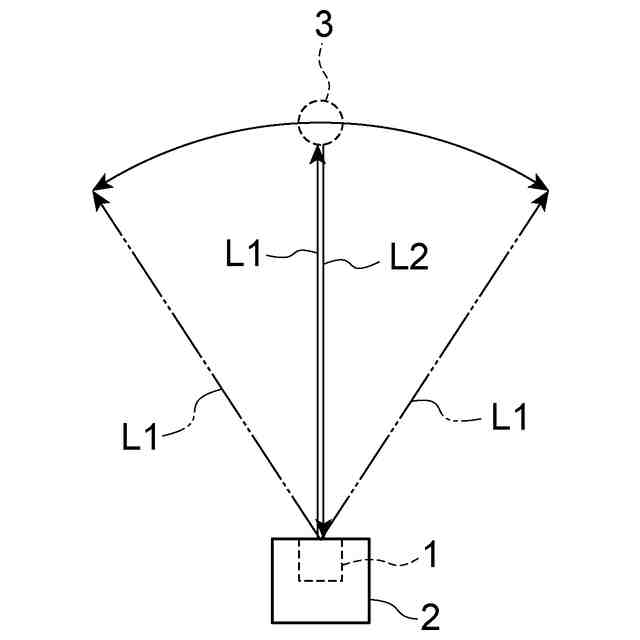
図1は、一実施形態に係る光モジュールを適用した検知装置の模式図である。
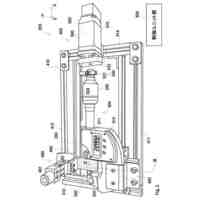
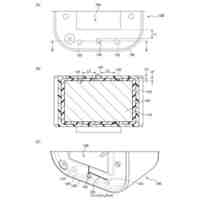
図2は、一実施形態に係る光モジュールの斜視図である。
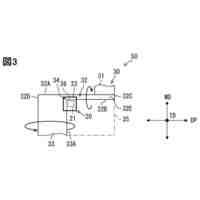
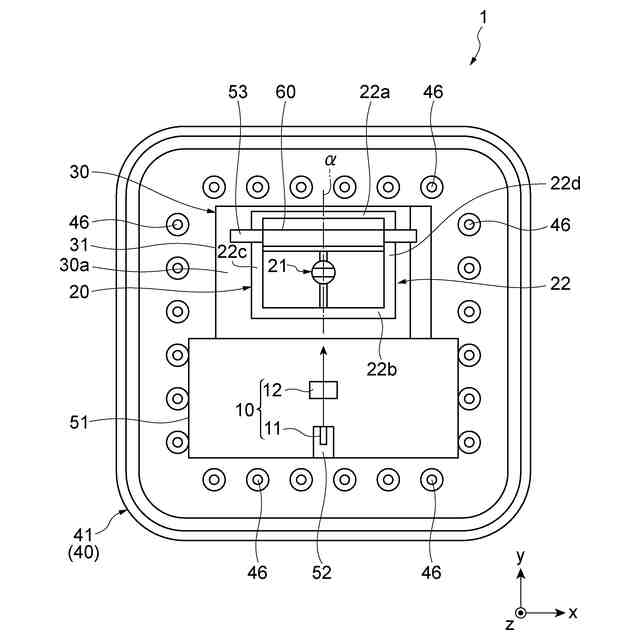
図3は、図1に示された光モジュールにおいてカバーが取り外された状態の平面図である。
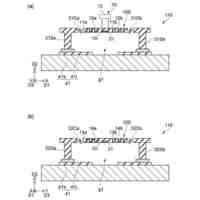
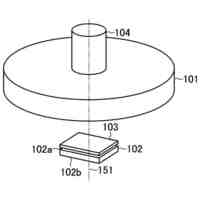
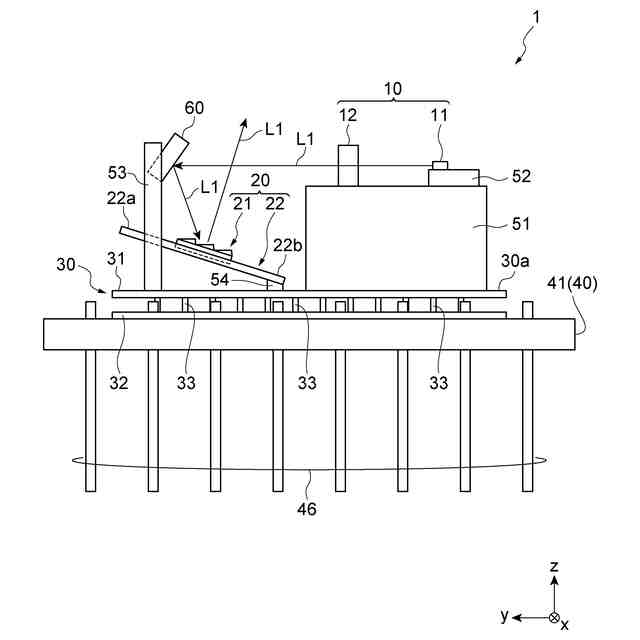
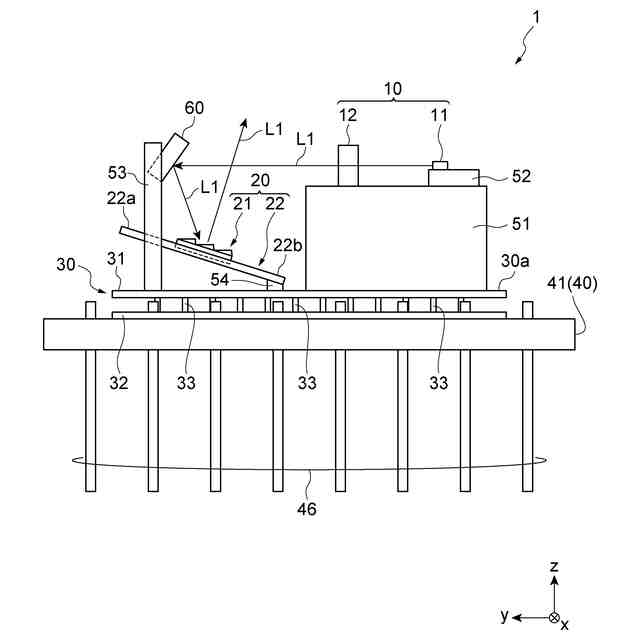
図4は、図3に示した光モジュール1を側方からみた場合の模式図である。
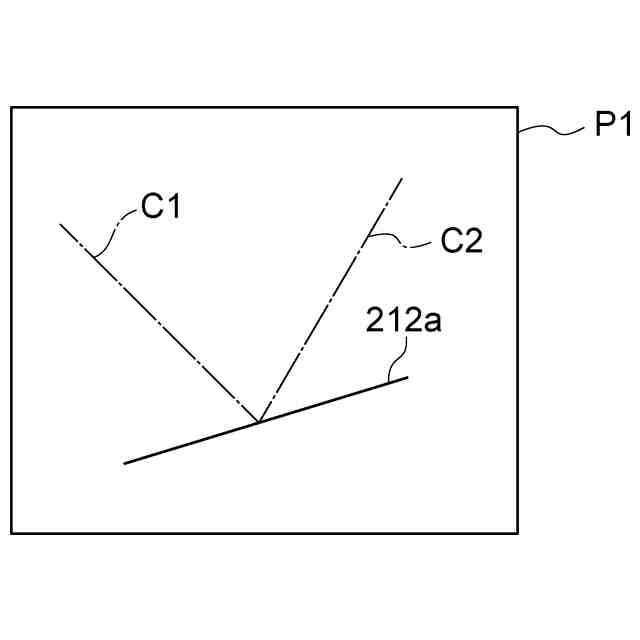
図5は、第1平面を説明するための模式図である。
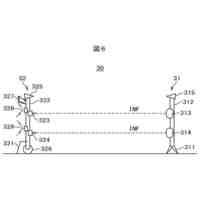
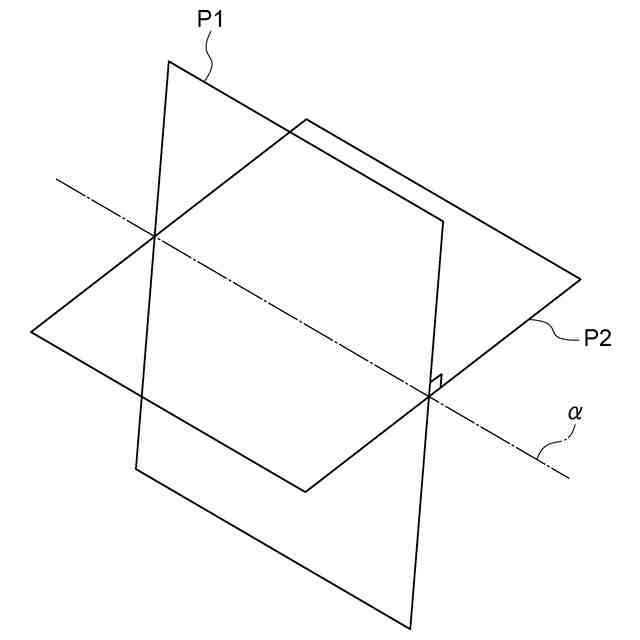
図6は、第2平面を説明するための模式図である。
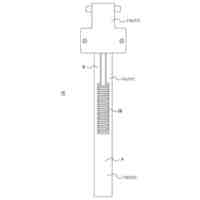
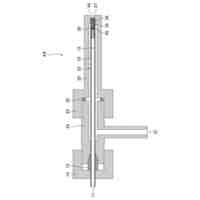
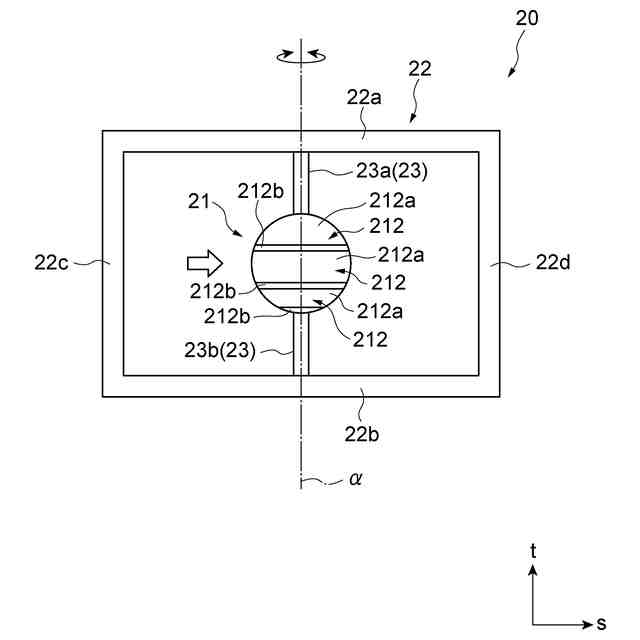
図7は、MEMS(走査部)の平面図である。
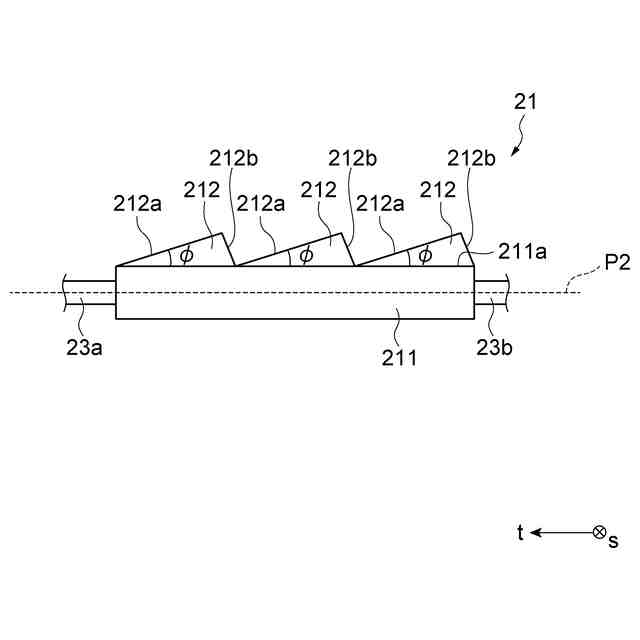
図8は、MEMSが有する走査ミラーの側面図である。
図9は、MEMSの配置条件の一例を説明するための模式図である。
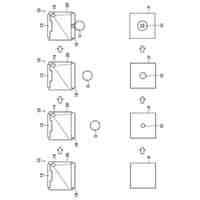
図10は、MEMSの第1配置例を説明するための模式図である。
図11は、MEMSの第2配置例を説明するための模式図である。
図12は、MEMSの第3配置例を説明するための模式図である。
図13は、走査ミラーが傾斜面を有しない場合のMEMSの参考配置例を示す模式図である。
図14は、走査される検知レーザ光の走査線に走査歪みが生じている場合の検知例を説明するための模式図である。
図15は、走査される検知レーザ光の走査線走査歪みが生じていない場合の検知例を説明するための模式図である。
図16は、走査歪みが存在しない場合における、走査ミラーが駆動停止状態における第2平面の法線と検知レーザ光との間の角度θと、第2平面に対する第1傾斜面の傾斜角φとの関係を示すグラフである。
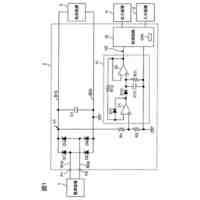
図17は、2軸MEMSの一例の概略構成を示す模式図である。
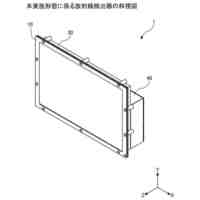
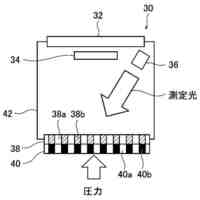
図18は、光モジュールの変形例を説明するための模式図である。
【発明を実施するための形態】
【0009】
[本開示の実施形態の説明]
最初に、本開示の実施形態の内容を列記して説明する。
【0010】
[1]一実施形態に係る光モジュールは、 光源部と、前記光源部から出力されたレーザ光を走査する走査部と、前記光源部および前記走査部が搭載される主面を有する支持部材と、前記光源部、前記走査部及び前記支持部材を収容するとともに、前記走査部によって走査された前記レーザ光を出力する窓部を有する収容部と、を備え、前記走査部は、走査ミラーと、前記走査ミラーを第1揺動軸の周りに駆動する駆動機構と、を有し、第1平面は、前記走査ミラーが駆動停止されている状態において、前記走査ミラーに入射する前記レーザ光の光軸と、前記走査ミラーによって反射された前記レーザ光の光軸を含む平面であり、第2平面は、前記走査ミラーが駆動停止されている状態において、前記第1平面と直交するとともに前記第1揺動軸を含む平面であり、前記走査ミラーは、前記第2平面に対して傾斜しており前記レーザ光を反射する傾斜面を有する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
通電検査装置
3日前
個人
光フアィバー距離計測器
5日前
個人
光フアィバー距離計測器
5日前
個人
バッテリ用交流電流供給装置
5日前
株式会社オービット
検査装置
12日前
株式会社ハシマ
検針機
2日前
日本FC企画株式会社
特性試験装置
23日前
株式会社ミツトヨ
自動測定装置
24日前
富士電機株式会社
回転機
13日前
株式会社SUBARU
車載装置
19日前
株式会社ミツトヨ
自動測定装置
24日前
本多電子株式会社
水中探知装置
24日前
有限会社フィット
外観検査装置
16日前
株式会社東芝
センサ
12日前
株式会社東芝
試験装置
19日前
アズビル株式会社
真空計測システム
13日前
靜甲株式会社
液切れ性評価システム
20日前
産電工業株式会社
水道検針システム
23日前
アズビル株式会社
回転角度計測装置
24日前
アズビル株式会社
真空計測システム
13日前
DIC株式会社
測定装置
4日前
富士電機株式会社
放射線検出器
4日前
シスメックス株式会社
分析装置
9日前
アズビル株式会社
環境負荷判定システム
24日前
株式会社アドバンテスト
試験装置
11日前
オムロン株式会社
電気装置
20日前
個人
ネブライザー
11日前
株式会社タムラ製作所
電流検出器
9日前
富士フイルム株式会社
圧力センサ
23日前
富士フイルム株式会社
圧力センサ
23日前
日鉄テックスエンジ株式会社
情報処理装置
9日前
スタンレー電気株式会社
車両前方視認装置
2日前
ダイハツ工業株式会社
凹部の深さ測定方法
2日前
スタンレー電気株式会社
車両前方視認装置
2日前
株式会社デンソー
電流検出器
16日前
株式会社国際電気
調整装置
16日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ