TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025048767
公報種別
公開特許公報(A)
公開日
2025-04-03
出願番号
2024152336
出願日
2024-09-04
発明の名称
ライダー装置およびその制御方法
出願人
ヒュンダイ・モービス・カンパニー・リミテッド
代理人
弁理士法人はるか国際特許事務所
主分類
G01S
7/4915 20200101AFI20250326BHJP(測定;試験)
要約
【課題】 本発明は、ライダー装置およびその制御方法が開示される。
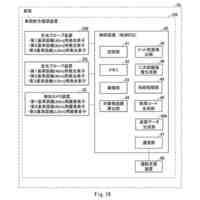
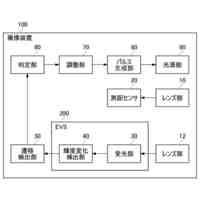
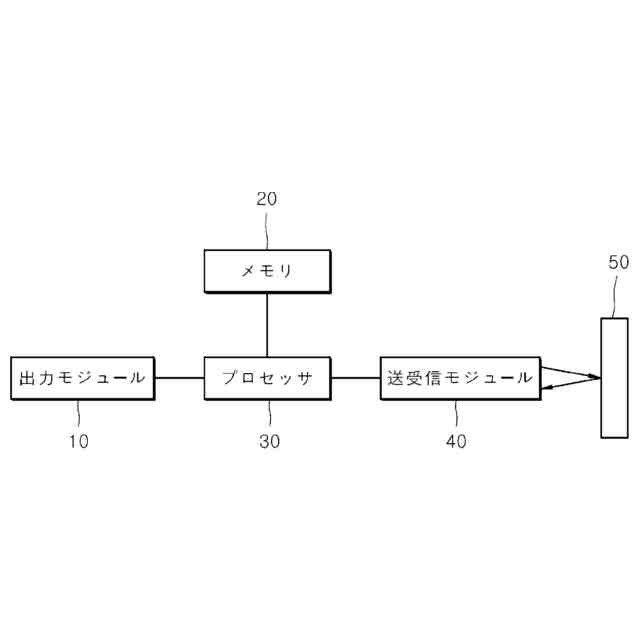
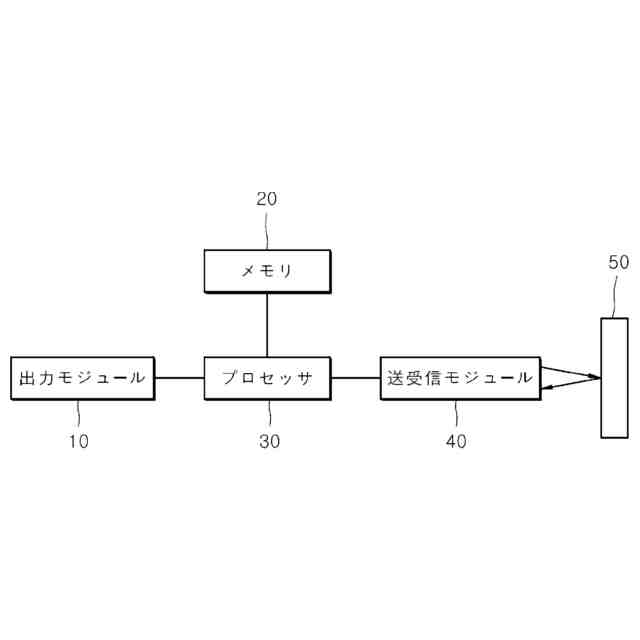
【解決手段】 本発明のライダー装置は、レーザ信号を送信した後、物体に反射する反射信号を受信する送受信モジュールと、算出した物体距離を出力する出力モジュールと、距離区間別に割当てられた測定回数を格納するメモリと、送受信モジュール、出力モジュールおよびメモリと作動的に連結(operatively coupled to)されたプロセッサと、を含み、プロセッサは、設定された測定回数の間に送受信モジュールを介して受信される反射信号を累積してヒストグラムを生成する過程を繰り返した後、ヒストグラムのピーク値に基づいて物体距離を算出して出力モジュールを介して出力し、物体距離に基づいて距離区間別に割当てられた測定回数に基づいて、設定された測定回数を変更して物体距離を算出する過程を繰り返し行うことを特徴とする。
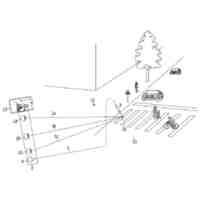
【選択図】 図1
特許請求の範囲
【請求項1】
レーザ信号を送信した後、物体に反射する反射信号を受信する送受信モジュールと、
算出した物体距離を出力する出力モジュールと、
距離区間別に割当てられた測定回数を格納するメモリと、
前記送受信モジュール、前記出力モジュールおよび前記メモリと作動的に連結(operatively coupled to)されたプロセッサと、を含み、
前記プロセッサは、設定された測定回数の間に前記送受信モジュールを介して受信される前記反射信号を累積してヒストグラムを生成する過程を繰り返した後、前記ヒストグラムのピーク値に基づいて物体距離を算出して前記出力モジュールを介して出力し、前記物体距離に基づいて前記距離区間別に割当てられた測定回数に基づいて、前記設定された測定回数を変更して前記物体距離を算出する過程を繰り返し行うことを特徴とするライダー装置。
続きを表示(約 2,200 文字)
【請求項2】
前記距離区間別に割当てられた測定回数は、前記送受信モジュールの出力強度に応じて最適化された測定回数であり、距離が遠いほど測定回数が増加することを特徴とする請求項1に記載のライダー装置。
【請求項3】
レーザ信号を送信した後、物体に反射する反射信号を受信する送受信モジュールと、
算出した物体距離を出力する出力モジュールと、
ヒストグラムの制限ピーク値を格納するメモリと、
前記送受信モジュール、前記出力モジュールおよび前記メモリと作動的に連結(operatively coupled to)されたプロセッサと、を含み、
前記プロセッサは、前記送受信モジュールを介して受信される前記反射信号を累積して前記ヒストグラムの生成過程を繰り返しながら、前記ヒストグラムのピーク値が前記制限ピーク値以上であれば、前記ヒストグラムの前記ピーク値に基づいて前記物体距離を算出して前記出力モジュールを介して出力することを特徴とするライダー装置。
【請求項4】
レーザ信号を送信した後、物体に反射する反射信号を受信する送受信モジュールと、
算出した物体距離を出力する出力モジュールと、
距離区間別に割当てられた測定回数およびヒストグラムの制限ピーク値を格納するメモリと、
前記送受信モジュール、前記出力モジュールおよび前記メモリと作動的に連結(operatively coupled to)されたプロセッサと、を含み、
前記プロセッサは、設定された測定回数の間に前記送受信モジュールを介して受信される前記反射信号を累積して前記ヒストグラムを生成する過程を繰り返した後、前記ヒストグラムのピーク値が前記制限ピーク値と比較して、前記ピーク値が前記制限ピーク値未満の場合、前記ヒストグラムを生成する過程を繰り返し、前記ピーク値と前記制限ピーク値とを比較した結果、前記ピーク値が前記制限ピーク値以上の場合、前記ヒストグラムの前記ピーク値に基づいて前記物体距離を算出して前記出力モジュールを介して出力することを特徴とするライダー装置。
【請求項5】
前記プロセッサは、前記物体距離に基づいて前記距離区間別に割当てられた測定回数に基づいて、前記設定された測定回数を変更することを特徴とする請求項4に記載のライダー装置。
【請求項6】
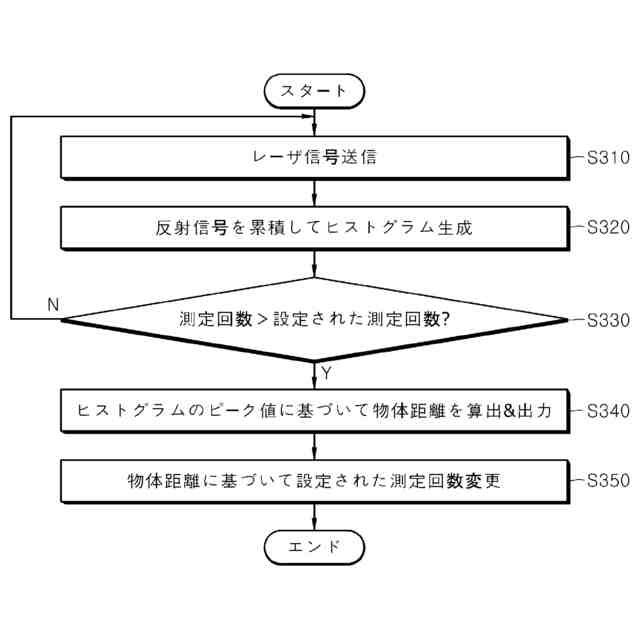
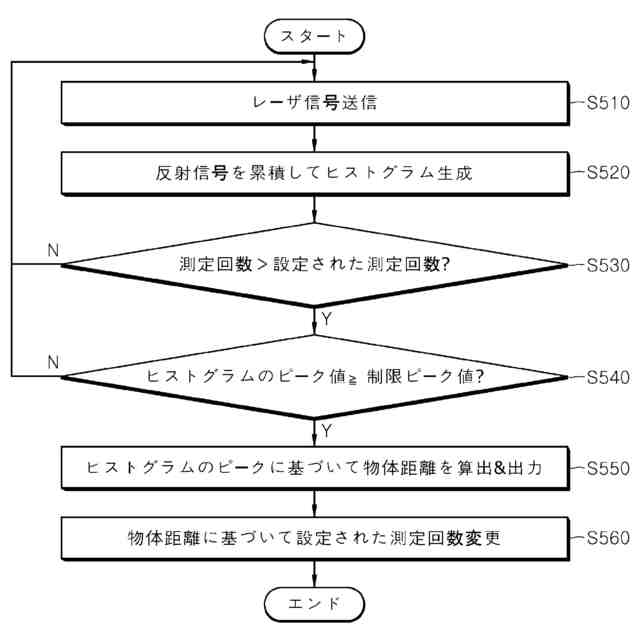
プロセッサが、送受信モジュールを介して受信される反射信号を累積してヒストグラムを生成するステップと、
前記プロセッサが、前記ヒストグラムを生成する過程を設定された測定回数の間に繰り返すステップと、
前記プロセッサが、前記設定された測定回数の間に繰り返して前記ヒストグラムを生成した後、前記ヒストグラムのピーク値に基づいて物体距離を算出して出力モジュールを介して出力するステップと、
前記プロセッサが、前記物体距離に基づいて距離区間別に割当てられた測定回数に基づいて、前記設定された測定回数を変更するステップと、を含むことを特徴とするライダー装置の制御方法。
【請求項7】
前記距離区間別に割当てられた測定回数は、前記送受信モジュールの出力強度に応じて最適化された測定回数であり、距離が遠いほど測定回数が増加することを特徴とする請求項6に記載のライダー装置の制御方法。
【請求項8】
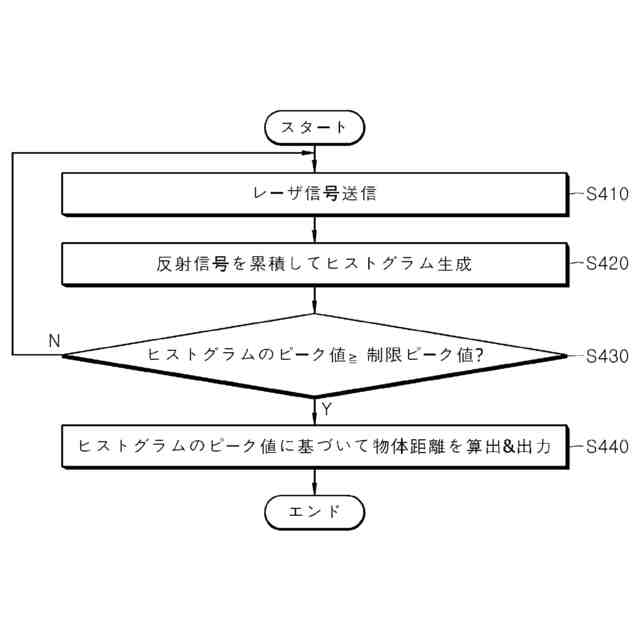
プロセッサが、送受信モジュールを介して受信される反射信号を累積してヒストグラムの生成過程を繰り返すステップと、
前記プロセッサが、前記ヒストグラムの生成過程を繰り返しながら、前記ヒストグラムのピーク値と制限ピーク値とを比較するステップと、
前記プロセッサが、前記ピーク値と前記制限ピーク値とを比較した結果、前記ピーク値が前記制限ピーク値以上の場合、前記ヒストグラムの前記ピーク値に基づいて物体距離を算出して出力モジュールを介して出力するステップと、を含むことを特徴とするライダー装置の制御方法。
【請求項9】
プロセッサが、送受信モジュールを介して受信される反射信号を累積してヒストグラムを生成するステップと、
前記プロセッサが、前記ヒストグラムを生成する過程を設定された測定回数の間に繰り返すステップと、
前記プロセッサが、前記設定された測定回数の間に繰り返して前記ヒストグラムを生成した後、前記ヒストグラムのピーク値と制限ピーク値とを比較するステップと、
前記プロセッサが、前記ピーク値と前記制限ピーク値とを比較した結果、前記ピーク値が前記制限ピーク値未満の場合、前記ヒストグラムを生成する過程を繰り返すステップと、
前記プロセッサが、前記ピーク値と前記制限ピーク値とを比較した結果、前記ピーク値が前記制限ピーク値以上の場合、前記ヒストグラムのピーク値に基づいて物体距離を算出して出力モジュールを介して出力するステップと、を含むことを特徴とするライダー装置の制御方法。
【請求項10】
前記プロセッサが、前記物体距離に基づいて距離区間別に割当てられた測定回数に基づいて、前記設定された測定回数を変更するステップ、をさらに含むことを特徴とする請求項9に記載のライダー装置の制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ライダー装置およびその制御方法に関し、より詳しくは、レーザを送受信して物体との距離を測定するために受信信号のヒストグラムを生成する時、物体との距離区間に応じて測定回数を異なるように設定したり、距離を測定しながらヒストグラムのピーク値を制限値と比較して測定回数を設定するライダー装置およびその制御方法に関する。
続きを表示(約 870 文字)
【背景技術】
【0002】
一般的に、ライダー(LiDAR)センサは、光を照射し、照射された光が物体から反射した信号を受信して物体を検知し、送信信号および受信信号の間の時間を測定して物体までの距離を計算する。
【0003】
このようなライダーセンサは、最近、自動車、ドローン、ロボット掃除機などの多様な機器に適用される傾向にある。
【0004】
ライダーセンサは、レーザ光を照射する送信部と、反射する光を受信する受信部とが、二次元の配列を形成する。ライダーセンサは、光を送受信する送信部および受信部が配列全体を用いて持続的に動作するので、検知しようとする対象に関係なく無駄に電力を消耗する。
【0005】
ライダーセンサは、送受信部を構成する配列全体を持続的に用いることによって熱が発生する問題がある。
【0006】
ライダーセンサは、配列全体が持続的に動作する状態が続く場合、ライダーセンサ自体の劣化が加速化され、ノイズが発生するなどの問題が発生することがある。
【0007】
また、二次元配列を構成する2Dライダーセンサは、SPAD(Single Photon Avalanche Diode)を用いてオブジェクト検知および距離の算出に効果的であるが、光敏感度が高くて内部ノイズおよび野外光に対するノイズ干渉が激しいという問題がある。
【0008】
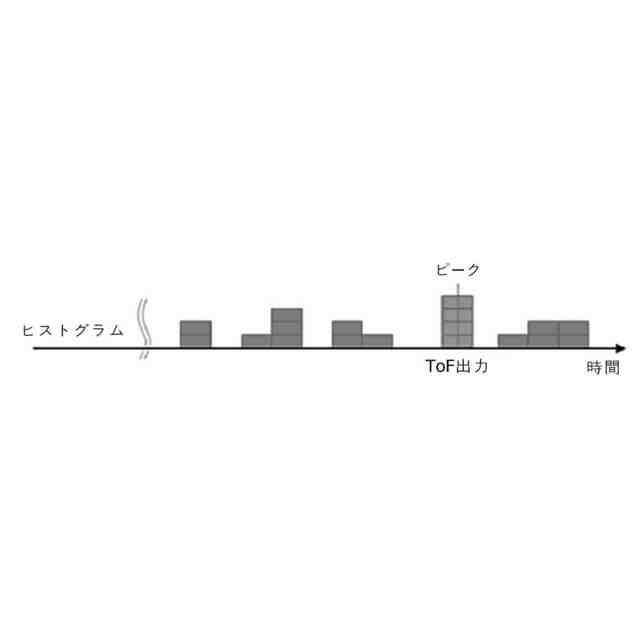
このような問題を解消するために、受信されるデータを数十から数百回測定してヒストグラムを生成した後、ピーク値を検出して有効値を判断する方策が提示されている。
【0009】
本発明の背景技術は、特許文献1に開示されている。
【先行技術文献】
【特許文献】
【0010】
韓国公開特許第2023-0105834号公報
【発明の概要】
【発明が解決しようとする課題】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
通電検査装置
1日前
個人
光フアィバー距離計測器
3日前
個人
光フアィバー距離計測器
3日前
株式会社ハシマ
検針機
今日
DIC株式会社
測定装置
2日前
富士電機株式会社
放射線検出器
2日前
スタンレー電気株式会社
車両前方視認装置
今日
矢崎総業株式会社
電流センサ
1日前
スタンレー電気株式会社
車両前方視認装置
今日
ダイハツ工業株式会社
凹部の深さ測定方法
今日
本田技研工業株式会社
物体検出装置
今日
本田技研工業株式会社
物体検出装置
今日
株式会社テイエルブイ
厚さ測定装置及び厚さ測定方法
2日前
株式会社JVCケンウッド
撮像装置及び測距方法
今日
日東建設株式会社
ボルト・ナットの健全性検査装置
今日
浜松ホトニクス株式会社
分光計測装置
1日前
セイコーエプソン株式会社
電子デバイス
1日前
倉敷化工株式会社
動特性測定装置
今日
個人
位置決め具及び位置決め具付きコンベックスルール
今日
株式会社ケー・エフ・シー
モルタル流動性試験システム
今日
株式会社キーエンス
レベル計
今日
株式会社キーエンス
レベル計
今日
株式会社キーエンス
レベル計
今日
株式会社キーエンス
レベル計
今日
株式会社キーエンス
レベル計
今日
住友電気工業株式会社
光モジュール
今日
浜松ホトニクス株式会社
分光分析装置
1日前
学校法人東京理科大学
計測方法
1日前
SWCC株式会社
温度測定方法
今日
トヨタ自動車株式会社
情報処理装置
2日前
東光東芝メーターシステムズ株式会社
電力量計
1日前
ヒロセ電機株式会社
磁気センサおよび磁気センサ装置
今日
トヨタ自動車株式会社
劣化検知方法
1日前
株式会社SUBARU
データ処理装置
1日前
アンリツ株式会社
光スペクトラムアナライザ
今日
トヨタ自動車株式会社
劣化予測装置
3日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ