TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025043011
公報種別
公開特許公報(A)
公開日
2025-03-28
出願番号
2023150277
出願日
2023-09-15
発明の名称
測位システム、及び測位プログラム
出願人
トヨタ自動車株式会社
代理人
弁理士法人秀和特許事務所
主分類
G01S
19/51 20100101AFI20250321BHJP(測定;試験)
要約
【課題】揺動体における所定点の状態を把握することを目的とする。
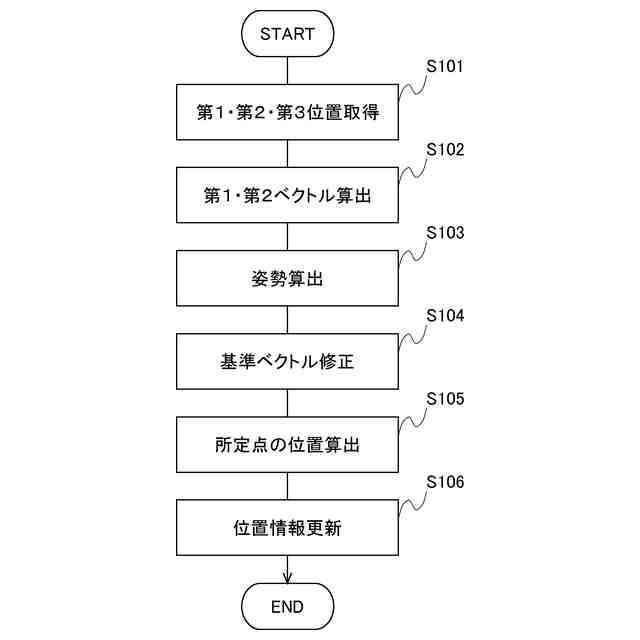
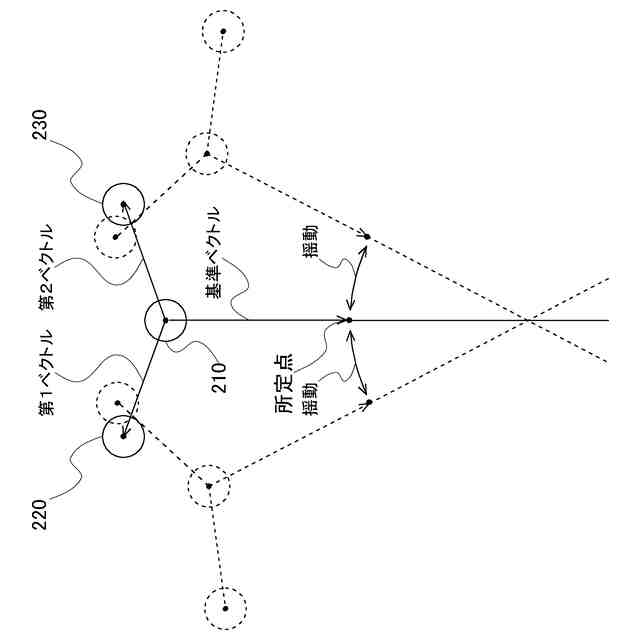
【解決手段】測位システムは、揺動体に取り付けられる第1測位アンテナ、第2測位アンテナ及び第3測位アンテナ、並びに演算装置を備える。測位システムにおいて、演算装置は、第1測位アンテナにより測定された第1位置、第2測位アンテナにより測定された第2位置、及び第3測位アンテナにより測定された第3位置を取得する。演算装置は、取得された第1位置から第2位置への第1ベクトル、及び第1位置から第3位置への第2ベクトルから、第1位置における揺動体の現在の姿勢を算出する。演算装置は、算出された第1位置における揺動体の現在の姿勢に応じて、揺動体の所定時の姿勢における第1測位アンテナから所定点への基準ベクトルを修正する。そして、演算装置は、修正された基準ベクトルを第1位置に加算することで、揺動体の現在の姿勢における所定点の位置を算出する。
【選択図】図5
特許請求の範囲
【請求項1】
揺動体に取り付けられる第1測位アンテナ、第2測位アンテナ及び第3測位アンテナ、並びに
演算装置、
を備える測位システムであって、
前記演算装置は、
前記第1測位アンテナにより測定された第1位置、前記第2測位アンテナにより測定された第2位置、及び前記第3測位アンテナにより測定された第3位置を取得することと、
取得された前記第1位置から前記第2位置への第1ベクトル、及び前記第1位置から前記第3位置への第2ベクトルから、前記第1位置における前記揺動体の現在の姿勢を算出することと、
算出された前記第1位置における前記揺動体の現在の姿勢に応じて、前記揺動体の所定時の姿勢における前記第1測位アンテナから所定点への基準ベクトルを修正することと、
修正された前記基準ベクトルを前記第1位置に加算することで、前記揺動体の現在の姿勢における前記所定点の位置を算出することと、
を実行するように構成される、
測位システム。
続きを表示(約 1,100 文字)
【請求項2】
前記所定点は、前記揺動体の表面上の点を含む、
請求項1に記載の測位システム。
【請求項3】
前記揺動体は、移動体であり、
前記所定点の位置を算出することは、前記揺動体における複数の所定点についての位置を算出することを含み、
前記演算装置は、
前記複数の所定点についての位置の変化量を取得することと、
前記複数の所定点についての位置の変化量から前記揺動体の移動による変化量を取り除くことにより、前記複数の所定点についての、前記揺動体の揺動による変化量を算出することと、
前記複数の所定点についての、前記揺動体の揺動による変化量の推移を取得することと、
前記揺動体の揺動による変化量の推移を参照し、前記複数の所定点のうち、前記揺動体の揺動による変化量が最も小さい点を、前記揺動体の浮心又は重心として特定することと、
を更に実行するように構成される、
請求項1又は2に記載の測位システム。
【請求項4】
前記揺動体は、移動体ではなく、
前記所定点の位置を算出することは、前記揺動体における複数の所定点についての位置を算出することを含み、
前記演算装置は、
前記複数の所定点についての、前記揺動体の揺動による変化量の推移を取得することと、
前記揺動体の揺動による変化量の推移を参照し、前記複数の所定点のうち、前記揺動体の揺動による変化量が最も小さい点を、前記揺動体の浮心又は重心として特定することと、
を更に実行するように構成される、
請求項1又は2に記載の測位システム。
【請求項5】
揺動体に取り付けられる第1測位アンテナ、第2測位アンテナ及び第3測位アンテナに接続された演算装置に情報処理方法を実行させる測位プログラムであって、
前記情報処理方法は、
前記第1測位アンテナにより測定された第1位置、前記第2測位アンテナにより測定された第2位置、及び前記第3測位アンテナにより測定された第3位置を取得することと、
取得された前記第1位置から前記第2位置への第1ベクトル、及び前記第1位置から前記第3位置への第2ベクトルから、前記第1位置における前記揺動体の現在の姿勢を算出することと、
算出された前記第1位置における前記揺動体の現在の姿勢に応じて、前記揺動体の所定時の姿勢における前記第1測位アンテナから所定点への基準ベクトルを修正することと、
修正された前記基準ベクトルを前記第1位置に加算することで、前記揺動体の現在の姿勢における前記所定点の位置を算出することと、
を含む、
測位プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、測位システム、及び測位プログラムに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
特許文献1には、GPS信号に基づいて二輪車の姿勢変化を検知する姿勢検知装置が開示されている。特許文献1に開示されている姿勢検知装置は、車両上の第1の位置に設けられた第1のGPS受信機と、第1の位置よりも低い第2の位置に設けられた第2のGPS受信機とを含む。また、姿勢検知装置は、第1のGPS受信機により検知されたGPS信号に基づいて第1の位置情報を求めると共に、第2のGPS受信機により検知されたGPS信号に基づいて第2の位置情報を求める。また、姿勢検知装置は、車両の進行方向を検知し、第1および第2の位置情報、ならびに車両進行方向に基づいて車両の姿勢変化を検知する。
【0003】
特許文献2には、複数のGPSアンテナがGPSアンテナ間の相対位置を固定して設置された移動体において各GPS衛星から送信され各GPSアンテナにより受信された各搬送波の中にマルチパス波が含まれているかを検出するマルチパス検出装置が開示されている。特許文献2に開示されているマルチパス検出装置は、各GPS衛星と各GPSアンテナとの距離を搬送波の数で示す搬送波位相の情報を入力し、入力した搬送波位相の情報に基づいてGPSアンテナ間における同じGPS衛星との搬送波位相の差をCPUを用いて算出する。
【0004】
マルチパス検出装置は、算出したGPSアンテナ間の搬送波位相の差と任意の方法により特定された特定のGPSアンテナから特定のGPS衛星への方向を示すLOS(Line Of Sight)ベクトルとを入力し、入力した搬送波位相の差と入力したLOSベクトルとに基づいてGPSアンテナ間の距離を示す基線長を観測基線長としてCPUを用いて算出する。マルチパス検出装置は、予め算出されたGPSアンテナ間の距離を示す既知基線長と前記基線長算出部が算出した観測基線長とをCPUを用いて比較し、観測基線長が既知基線長より所定の閾値以上異なる場合に当該観測基線長の算出に用いられた各搬送波の中にマルチパス波が含まれていると判定する。
【先行技術文献】
【特許文献】
【0005】
特開2005-207831号公報
特開2008-298443号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本開示は、揺動体における所定点の状態を把握することを目的とする。
【課題を解決するための手段】
【0007】
本開示の第1の態様に係る測位システムは、
揺動体に取り付けられる第1測位アンテナ、第2測位アンテナ及び第3測位アンテナ、並びに
演算装置、
を備える測位システムであって、
前記演算装置は、
前記第1測位アンテナにより測定された第1位置、前記第2測位アンテナにより測定
された第2位置、及び前記第3測位アンテナにより測定された第3位置を取得することと、
取得された前記第1位置から前記第2位置への第1ベクトル、及び前記第1位置から前記第3位置への第2ベクトルから、前記第1位置における前記揺動体の現在の姿勢を算出することと、
算出された前記第1位置における前記揺動体の現在の姿勢に応じて、前記揺動体の所定時の姿勢における前記第1測位アンテナから所定点への基準ベクトルを修正することと、
修正された前記基準ベクトルを前記第1位置に加算することで、前記揺動体の現在の姿勢における前記所定点の位置を算出することと、
を実行するように構成される。
【0008】
本開示の第2の態様に係る測位プログラムは、
揺動体に取り付けられる第1測位アンテナ、第2測位アンテナ及び第3測位アンテナに接続された演算装置に情報処理方法を実行させる測位プログラムであって、
前記情報処理方法は、
前記第1測位アンテナにより測定された第1位置、前記第2測位アンテナにより測定された第2位置、及び前記第3測位アンテナにより測定された第3位置を取得することと、
取得された前記第1位置から前記第2位置への第1ベクトル、及び前記第1位置から前記第3位置への第2ベクトルから、前記第1位置における前記揺動体の現在の姿勢を算出することと、
算出された前記第1位置における前記揺動体の現在の姿勢に応じて、前記揺動体の所定時の姿勢における前記第1測位アンテナから所定点への基準ベクトルを修正することと、
修正された前記基準ベクトルを前記第1位置に加算することで、前記揺動体の現在の姿勢における前記所定点の位置を算出することと、
を含む。
【発明の効果】
【0009】
本開示により、揺動体における所定点の状態を把握することが可能となる。
【図面の簡単な説明】
【0010】
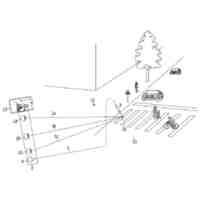
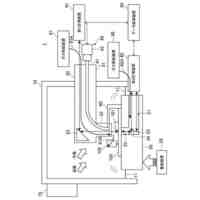
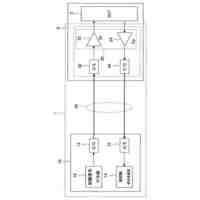
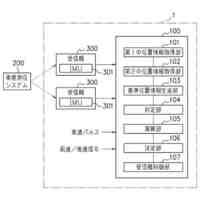
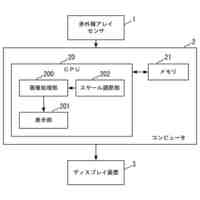
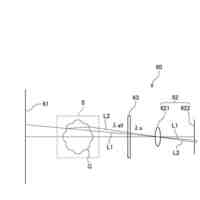
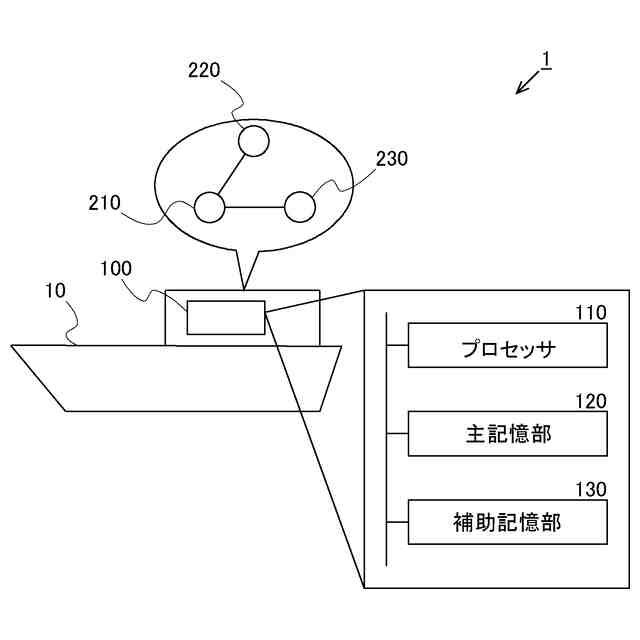
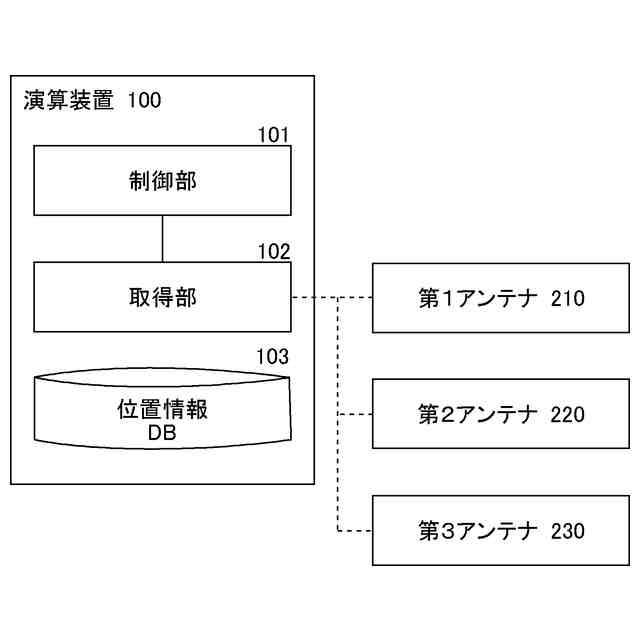
図1は、測位システムの概略構成を示す図である。
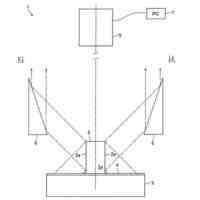
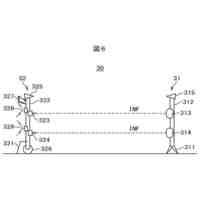
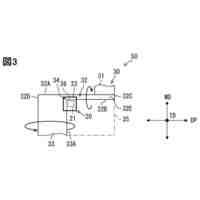
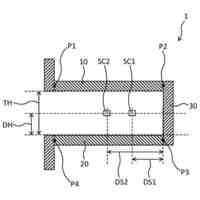
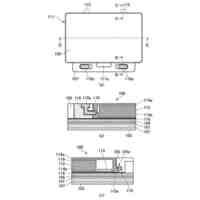
図2は、船舶が揺動している場合の各アンテナと所定点の位置の変化の一例を示す図である。
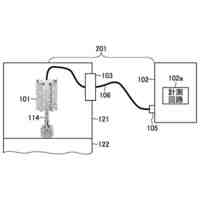
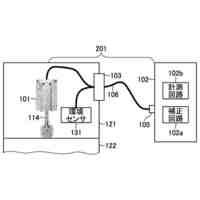
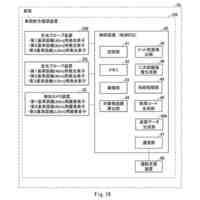
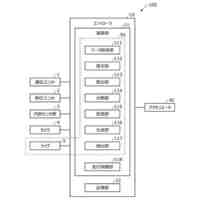
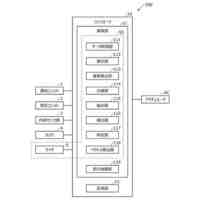
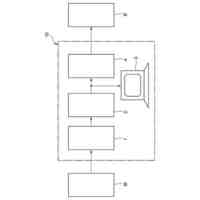
図3は、演算装置の機能構成の一例を概略的に示すブロック図である。
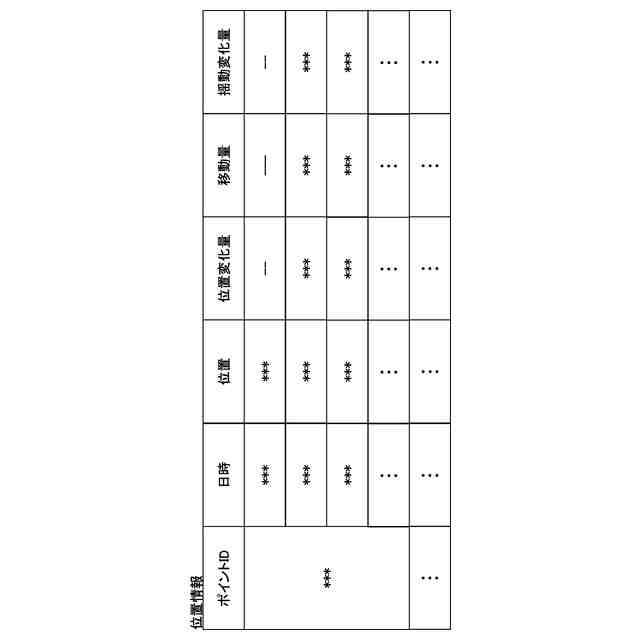
図4は、位置情報データベースに保持されている位置情報のテーブル構成の一例を示す図である。
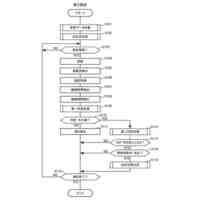
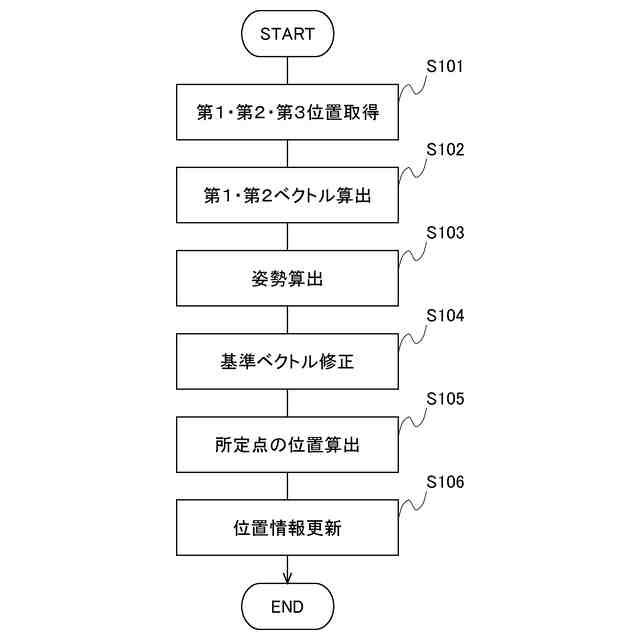
図5は、演算装置における制御部によって実行される第1の処理のフローチャートである。
図6は、演算装置における制御部によって実行される第2の処理のフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
通電検査装置
4日前
個人
光フアィバー距離計測器
6日前
個人
光フアィバー距離計測器
6日前
個人
バッテリ用交流電流供給装置
6日前
株式会社オービット
検査装置
13日前
株式会社ハシマ
検針機
3日前
有限会社フィット
外観検査装置
17日前
株式会社東芝
センサ
13日前
富士電機株式会社
回転機
14日前
株式会社東芝
試験装置
20日前
アズビル株式会社
真空計測システム
14日前
アズビル株式会社
真空計測システム
14日前
富士電機株式会社
放射線検出器
5日前
DIC株式会社
測定装置
5日前
シスメックス株式会社
分析装置
10日前
株式会社タムラ製作所
電流検出器
10日前
個人
ネブライザー
12日前
株式会社アドバンテスト
試験装置
12日前
スタンレー電気株式会社
車両前方視認装置
3日前
スタンレー電気株式会社
車両前方視認装置
3日前
ダイハツ工業株式会社
凹部の深さ測定方法
3日前
株式会社国際電気
調整装置
17日前
本田技研工業株式会社
物体検出装置
3日前
本田技研工業株式会社
物体検出装置
3日前
株式会社デンソー
電流検出器
17日前
日鉄テックスエンジ株式会社
情報処理装置
10日前
矢崎総業株式会社
電流センサ
4日前
愛知製鋼株式会社
測量方法及び測量システム
10日前
株式会社エイアンドティー
生体試料分析装置
10日前
株式会社日本マイクロニクス
プローブ
10日前
公立大学法人大阪
測定方法および構造体
17日前
アズビル株式会社
温度測定システムおよび方法
10日前
キヤノン株式会社
放射線撮影装置及びバッテリ
14日前
株式会社テイエルブイ
厚さ測定装置及び厚さ測定方法
5日前
株式会社レイズテック
部品寸法データ集計装置
19日前
株式会社SCREENホールディングス
観察装置
6日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ