TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025040942
公報種別
公開特許公報(A)
公開日
2025-03-25
出願番号
2024138989
出願日
2024-08-20
発明の名称
真空ポンプ
出願人
プファイファー・ヴァキューム・テクノロジー・アクチエンゲゼルシャフト
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
F04D
19/04 20060101AFI20250317BHJP(液体用容積形機械;液体または圧縮性流体用ポンプ)
要約
【課題】真空ポンプであって、ステータと、ロータと、ステータに対してロータを非接触式に軸支する少なくとも1つの電磁軸受を有する軸受ユニットと、運転中にロータとステータとの間の距離を測定するように構成された少なくとも1つの距離センサと、距離センサから提供される距離測定値に基づいて対抗手段を取るように構成された制御ユニットと、を備える、真空ポンプにおいて、可能な限り静かな作動の真空ポンプを提供する。
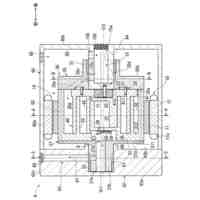
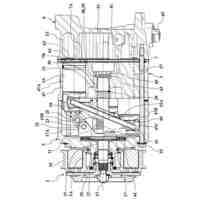
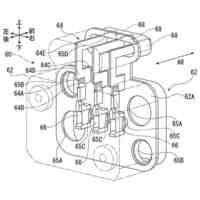
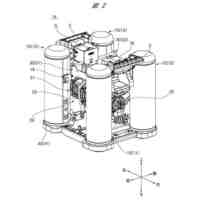
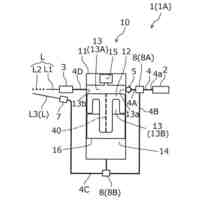
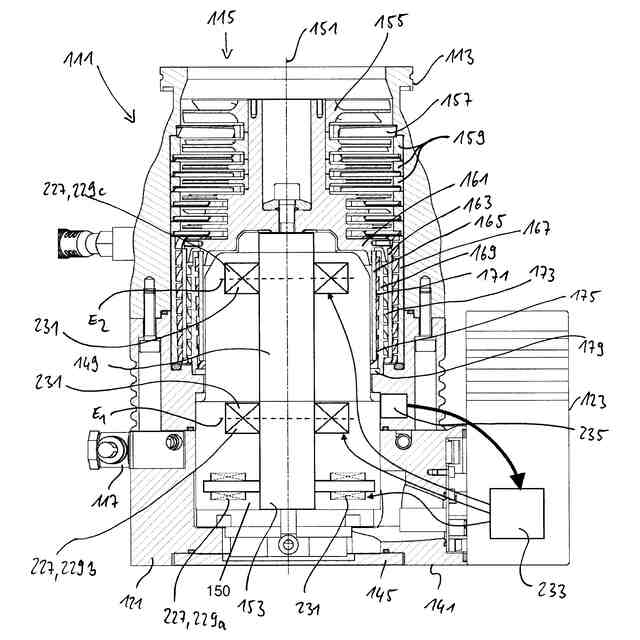
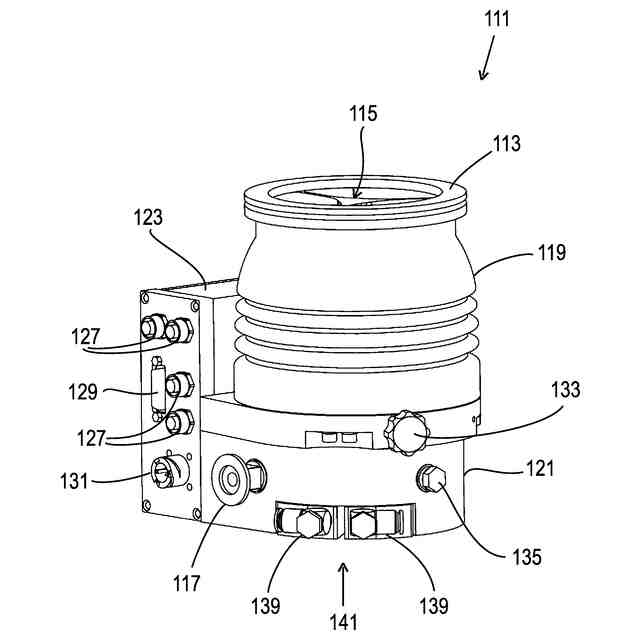
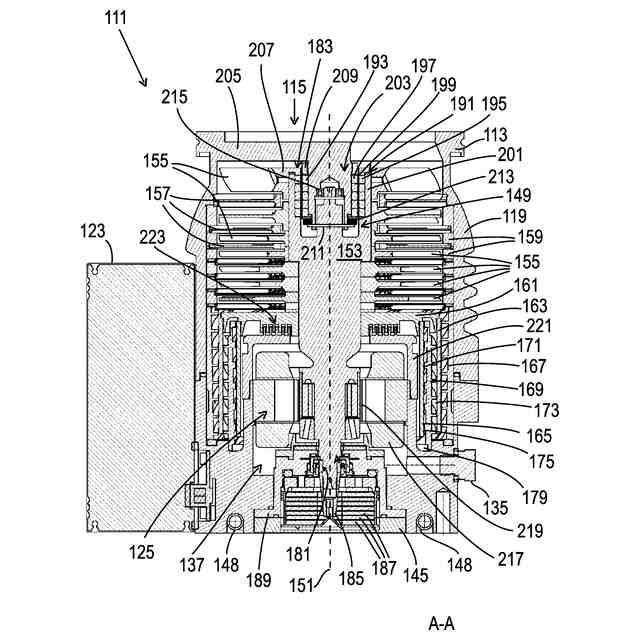
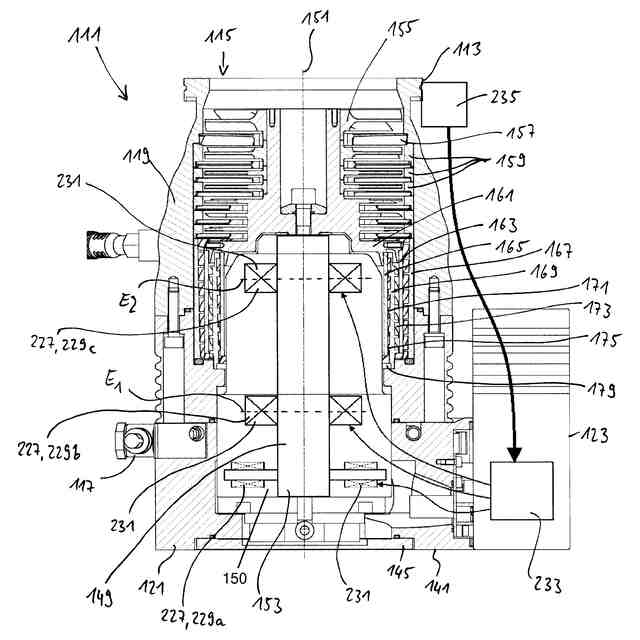
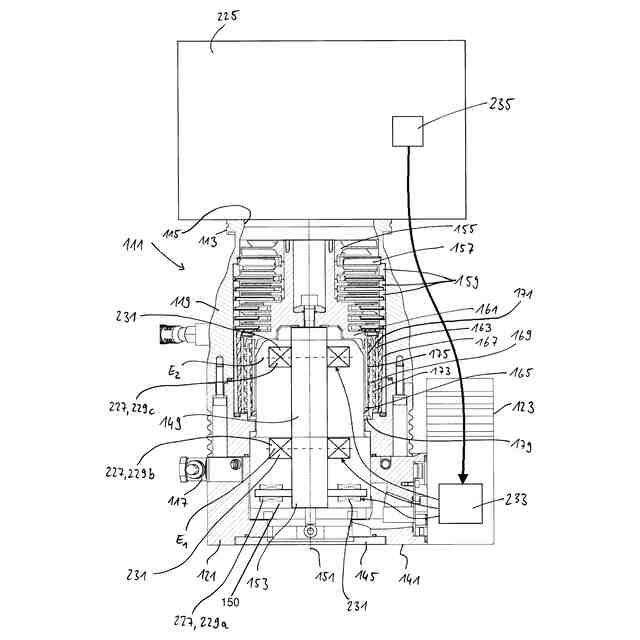
【解決手段】真空ポンプ111は、少なくとも1つの運動センサ235、特に加速度センサ又は角速度センサを有し、運動センサは、真空ポンプの運動、特に振動を検出し、検出された運動に基づいて少なくとも1つの運動測定値を提供するように構成されていて、制御ユニット233は、さらに、対抗手段を取る際に運動センサから提供される運動測定値を考慮するように構成されている。
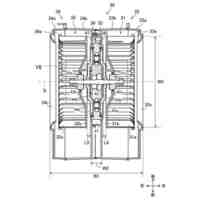
【選択図】図6
特許請求の範囲
【請求項1】
真空ポンプ(111)、特にターボ分子真空ポンプ(111)であって、
ステータ(150)と、
前記ステータ(150)に対して回転軸線(151)を中心に回転可能なロータ(149)と、
前記ステータ(150)に対して前記ロータ(149)を非接触式に軸支する少なくとも1つの電磁軸受(229a、229b、229c)を有する軸受ユニット(227)と、
運転中に前記ロータ(149)と前記ステータ(150)との間の距離を測定するように構成された少なくとも1つの距離センサと、
前記距離センサから提供される距離測定値に基づいて対抗手段を取るように構成された制御ユニット(233)と、を備え、
前記真空ポンプ(111)は、少なくとも1つの運動センサ(235)、特に加速度センサ又は角速度センサを有し、前記運動センサ(235)は、前記真空ポンプ(111)の運動、特に振動を検出し、検出された運動に基づいて少なくとも1つの運動測定値を提供するように構成されていて、
前記制御ユニット(233)は、さらに、対抗手段を取る際に前記運動センサ(235)から提供される運動測定値を考慮するように構成されている、真空ポンプ(111)。
続きを表示(約 1,500 文字)
【請求項2】
1つの対抗手段は、前記ロータ(149)を通常位置へ戻すことにあり、その際、正常位置への前記ロータ(149)の戻しを、運動測定値を最小化することによって行う、請求項1に記載の真空ポンプ(111)。
【請求項3】
1つの対抗手段は、前記真空ポンプ(111)の運動を減らすために通常位置からの前記ロータのずれを許容することにある、請求項1に記載の真空ポンプ(111)。
【請求項4】
運動測定値には、真空ポンプの運動方向が含まれ、1つの対抗手段は、前記ロータ(149)の変位によって、検出された運動方向とは反対方向の前記真空ポンプ(111)の運動を引き起こすことにある、請求項1に記載の真空ポンプ(111)。
【請求項5】
1つの対抗手段は、前記ロータ(149)の回転速度を変化させることにある、請求項1から4のいずれか一項に記載の真空ポンプ(111)。
【請求項6】
前記運動センサ(235)は、前記真空ポンプ(111)に、特に他の真空機器に通じる接続箇所に取り付けられている又は取付け可能である、請求項1から5のいずれか一項に記載の真空ポンプ(111)。
【請求項7】
請求項1から6のいずれか一項に記載の真空ポンプ(111)と真空機器とを備える真空システムにおいて、前記真空ポンプ(111)は、前記真空機器に真空技術的に接続されていて、前記運動センサ(235)は、前記真空機器に取り付けられている又は取付け可能である、真空システム。
【請求項8】
特に請求項1から6のいずれか一項に記載の真空ポンプ(111)を運転する、又は前記真空ポンプ(111)と真空機器とを有する、特に請求項7に記載の真空システムを運転する方法において、
前記真空ポンプ(111)は、ステータ(150)と、回転軸線(151)を中心に回転可能なロータ(149)と、前記ステータ(150)に対して前記ロータ(149)を非接触式に軸支する少なくとも1つの電磁軸受(229a、229b、229c)を有する軸受ユニット(227)と、運転中に前記ロータ(149)と前記ステータ(150)との間の距離を測定する少なくとも1つの距離センサと、制御ユニット(233)と、を有し、
前記真空ポンプ(111)又は前記真空機器は、運動センサ(235)、特に加速度センサ又は角速度センサを有し、運動センサ(235)よって、前記真空ポンプ(111)の運動又は前記真空ポンプ(111)によって引き起こされる前記真空機器の運動を検出し、
方法は、
-前記距離センサによって距離測定値を提供すること、
-前記運動センサ(235)によって少なくとも1つの運動測定値を提供すること、
-距離測定値に基づいてかつ運動測定値を考慮して、前記制御ユニット(233)によって対抗手段を取ること、を有する、方法。
【請求項9】
対抗手段は、
-前記ロータ(149)を通常位置へ戻すこと、及び/又は
-前記ロータ(149)の回転速度を変化させること、
を含む、請求項8に記載の方法。
【請求項10】
-運動測定値を繰り返し検出すること、
-検出された運動測定値を設定可能な最大運動値と比較すること、及び
-検出された運動測定値が最大運動値に達する又は最大運動値を下回るまで、対抗手段を継続すること、
をさらに含む、請求項8又は9に記載の方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
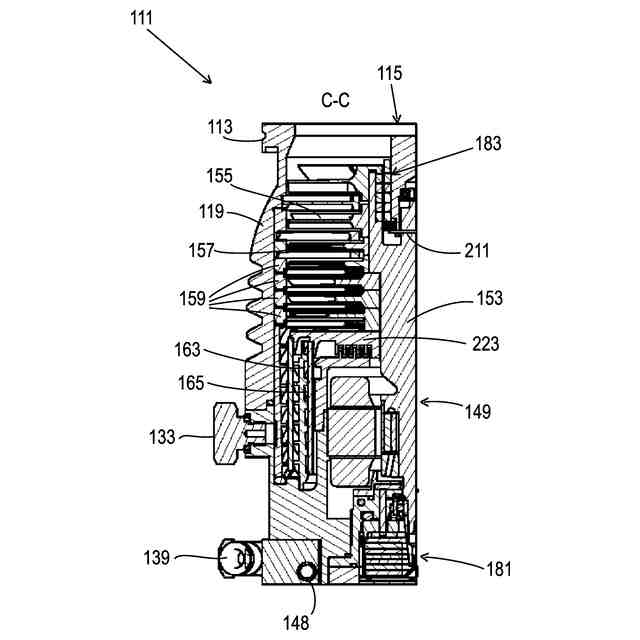
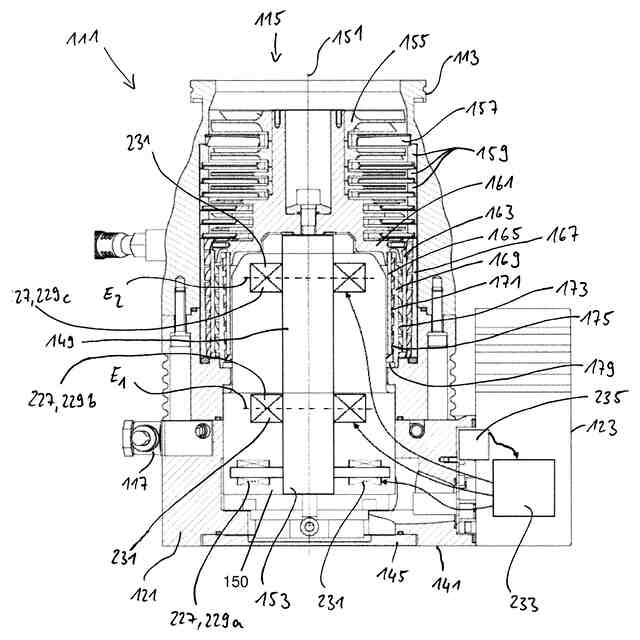
本発明は、真空ポンプ、特にターボ分子真空ポンプであって、ステータと、ステータに対して回転軸線を中心に回転可能なロータと、ステータに対してロータを非接触式に軸支する少なくとも1つの電磁軸受を有する軸受ユニットと、運転中にロータとステータとの間の距離を測定するように構成された少なくとも1つの距離センサと、距離センサから提供される距離測定値に基づいて対抗手段を取るように構成された制御ユニットと、を備える、真空ポンプに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
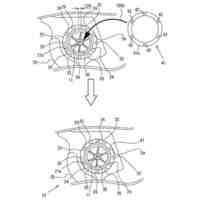
このような真空ポンプは、基本的に公知であり、通常は真空ポンプの運転中に回転するロータによってレシピエントを真空引きするために用いられる。運転中、ステータに対するロータの位置は、規則的に距離センサを用いて検出され、距離センサに接続された制御ユニットによって、検出された距離測定値に基づいて永続的に後調整される。このことは、例えば電磁軸受のコイルに的確に通電することによって行うことができる。その際に生成される電磁吸引力によって、ロータは、ステータに対して距離が保持される。原則として、ロータを、電磁反発力によって、ステータに対する距離を保持することも考えられる。しかし、この場合、電磁力は、ロータに作用するだけではなく、反作用原理に基づいて真空ポンプの残りの部分にも作用する。これにより、真空ポンプ全体が動かされる。さらに、ロータの駆動に用いられるモータも、真空ポンプの運転中、真空ポンプを動かす力を発生させる。
【0003】
真空ポンプのこのような運動、特にこれによって引き起こされる振動は、真空ポンプの静かな作動に対して不都合に作用し、真空ポンプに接続されたレシピエントへ伝達され得る。このことは、とりわけ振動に敏感な用途で所望されない。例えば真空ポンプの運動は、電子顕微鏡の場合には画像障害を引き起こす可能性がある。
【発明の概要】
【発明が解決しようとする課題】
【0004】
したがって、本発明の課題は、可能な限り静かな作動の真空ポンプを提供することである。
【課題を解決するための手段】
【0005】
この課題は、独立請求項に記載の真空ポンプ、真空システム及び方法によって解決される。
【0006】
本発明の基礎をなす思想は、運動センサを用いて、真空ポンプの運動又は真空ポンプによって引き起こされる運動を検出し、検出された運動を考慮して、真空ポンプの運動を減らす対抗手段を取ることにある。これにより、真空ポンプの静かな作動が改善される。
【0007】
運動センサによって検出される運動は、好ましくは、真空ポンプ全体の運動に関係する。これには、特に、例えばロータ等の真空ポンプの個々の可動部分の運動の検出は含まれない。
【0008】
運動センサが真空ポンプの非作動時、特にロータが停止しているときにバックグラウンド運動を検出することによって、運動センサは、真空ポンプの運動と真空ポンプ自体によって引き起こされるものではないバックグラウンド運動とを区別できる。このことは、例えば真空ポンプの作動の前又は後に行ってよい。バックグラウンド運動、特に周期的なバックグラウンド運動は、検出された運動の全体から算出でき、これにより真空ポンプの運動が特定される。
【0009】
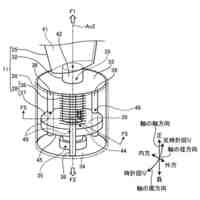
好ましくは、真空ポンプは、ロータが3軸、好ましくは5軸で電磁式に軸支される真空ポンプである。3軸の軸支では、ロータは、その縦軸線又は回転軸線の方向と、第1の平面内で相互に直交方向にかつロータ縦軸線に対して直交方向に向けられた2つの軸線の方向との両方で電磁式に軸支されている。5軸の軸支では、ロータは、付加的にさらに第2の平面内で、互いに直交方向にかつロータ縦軸線に対して直交方向に向けられた2つの軸線の方向に電磁式に軸支されていて、この場合、第2の平面は、第1の平面に対してロータの縦軸線の方向に離間して位置する。5軸でロータが軸支される真空ポンプは、完全に磁気式にロータが軸支された真空ポンプとも称される。
【0010】
好適には、軸受軸線のうちの少なくとも1つの方向のロータとステータと間の距離が監視される。したがって、少なくとも1つの距離センサが、ロータ縦軸線に対して平行の方向のロータとステータとの間の軸方向の距離を検出できる。付加的又は代替的に、ロータ縦軸線に対して直角のロータとステータとの間の半径方向の距離を検出するために、少なくとも1つの距離センサが設けられてよい。特に、一平面の、ロータ縦軸線に対して直交方向に向けられた2つの軸線のそれぞれに、半径方向の距離センサが対応付けられてよい。半径方向のロータ変位の特に正確な測定は、一平面の、ロータ縦軸線に対して直交方向に向けられた2つの軸線のそれぞれに、2つの距離センサが、ロータの反対側にそれぞれ配置されていることによって達成できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
扇風機取り付け風力分散機
8日前
株式会社ON-LIFE
衣服用送風装置
14日前
株式会社豊田自動織機
遠心圧縮機
12日前
ミネベアミツミ株式会社
軸流ファン
14日前
株式会社豊田自動織機
圧縮機
7日前
パシフィックゴルフマネージメント株式会社
送風機
6日前
サンデン株式会社
圧縮機
5日前
サンデン株式会社
圧縮機
5日前
サンデン株式会社
圧縮機
5日前
パシフィックゴルフマネージメント株式会社
送風機
6日前
パシフィックゴルフマネージメント株式会社
送風機
6日前
株式会社酉島製作所
回転機械の軸受装置
7日前
株式会社豊田自動織機
電動圧縮機
5日前
株式会社ジェイテクトフルードパワーシステム
液圧ポンプ
14日前
トヨタ自動車株式会社
遠心圧縮機
12日前
イーグル工業株式会社
弁
21日前
イーグル工業株式会社
弁
21日前
NTN株式会社
電動流体ポンプ及びその製造方法
21日前
いすゞ自動車株式会社
流体作動機械
1日前
工機ホールディングス株式会社
作業機
11日前
株式会社アテックス
送風機及び送風機付き寝具
22日前
株式会社日立産機システム
圧縮機及び圧縮機の監視方法
22日前
スエヒロシステム株式会社
耐腐食性スクリューポンプの回転軸
7日前
株式会社前川製作所
スクリュ圧縮機及びガス圧縮設備
20日前
株式会社前川製作所
スクリュ圧縮機及びガス圧縮設備
20日前
株式会社前川製作所
スクリュ圧縮機及びガス圧縮設備
20日前
CKD株式会社
ダイアフラムポンプ
13日前
セイコーエプソン株式会社
液体噴射装置及び液体噴射方法
6日前
テラル株式会社
ベルトガード、及び、ベルト駆動式送風機
1日前
本田技研工業株式会社
羽根車及び羽根車の製造方法
6日前
愛三工業株式会社
電動ウォータポンプ
5日前
川崎重工業株式会社
液圧回転機械の異常検出システム
5日前
ダイキン工業株式会社
ファンユニットおよび空気清浄機
7日前
愛三工業株式会社
多段式の電動ウォータポンプ
今日
パナソニックIPマネジメント株式会社
空気調和機の室内機及び空気調和機
4日前
富士通クライアントコンピューティング株式会社
ファン装置
6日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ