TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025038722
公報種別
公開特許公報(A)
公開日
2025-03-19
出願番号
2023145501
出願日
2023-09-07
発明の名称
レーダ目標追尾装置及びレーダ目標追尾プログラム
出願人
日本無線株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G01S
13/66 20060101AFI20250312BHJP(測定;試験)
要約
【課題】本開示は、レーダを用いて船舶又は航空機等の目標を追尾するにあたり、波又は雲等によるクラッタの密度が高いときでも、クラッタを着目目標に誤って紐付ける可能性を低くするとともに、着目目標の予測ゲートを狭めずに、着目目標の追尾処理を途絶えさせる可能性を低くすることを目的とする。
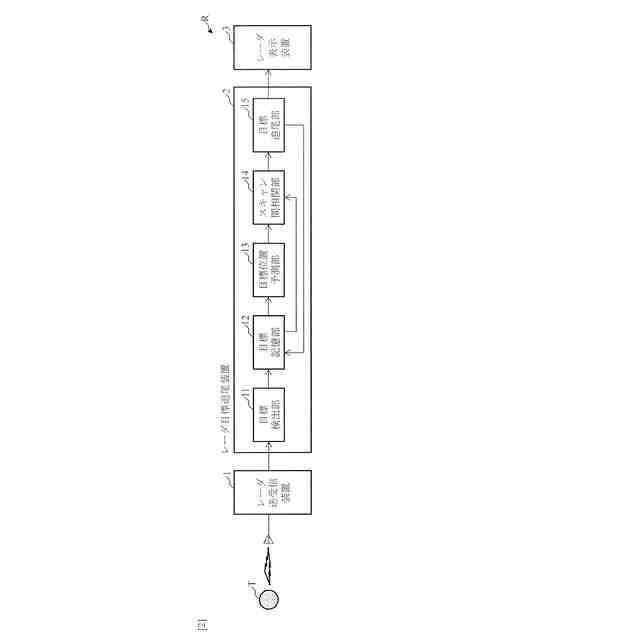
【解決手段】本開示は、各回のレーダスキャンにおいて、着目目標の予測ゲートの内部にある各目標について、前回のレーダスキャンにおける着目目標の予測ドップラ速度及び/又は受信電力から、各回のレーダスキャンにおける各目標の観測ドップラ速度及び/又は受信電力への、スキャン間変化率を算出するスキャン間相関部14と、各回のレーダスキャンにおいて、着目目標の予測ゲートの内部にある各目標のうちの、スキャン間変化率が最も小さい目標を、着目目標に紐付ける目標追尾部15と、を備えるレーダ目標追尾装置2である。
【選択図】図2
特許請求の範囲
【請求項1】
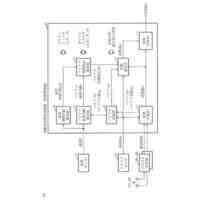
各回のレーダスキャンにおいて、検出点をクラスタリングし、各目標の位置を検出し、各目標の観測ドップラ速度及び受信電力の少なくともいずれかを検出する目標検出部と、
各回のレーダスキャンにおいて、次回のレーダスキャンに備えて、各目標の位置を予測し、必要に応じて各目標のドップラ速度を予測し、各目標の予測位置を中心として、各目標の予測ゲートを設定する目標位置予測部と、
各回のレーダスキャンにおいて、着目目標の予測ゲートの内部にある各目標について、前回のレーダスキャンにおける前記着目目標の予測ドップラ速度及び受信電力の少なくともいずれかから、各回のレーダスキャンにおける各目標の観測ドップラ速度及び受信電力の少なくともいずれかへの、スキャン間変化率を算出するスキャン間相関部と、
各回のレーダスキャンにおいて、前記着目目標の予測ゲートの内部にある各目標のうちの、前記スキャン間変化率が最も小さい目標を、前記着目目標に紐付ける目標追尾部と、
を備えることを特徴とするレーダ目標追尾装置。
続きを表示(約 1,000 文字)
【請求項2】
前記スキャン間相関部は、各回のレーダスキャンにおいて、前記着目目標の予測ゲートの内部にある各目標について、前回のレーダスキャンにおける前記着目目標の予測ドップラ速度から、各回のレーダスキャンにおける各目標の観測ドップラ速度への予測ドップラ速度変化率と、前回のレーダスキャンにおける前記着目目標の受信電力から、各回のレーダスキャンにおける各目標の受信電力への受信電力変化率と、を前記着目目標のレーダからの距離又は前記着目目標の運動状態に応じた重み付けで加算し、前記スキャン間変化率を算出する
ことを特徴とする、請求項1に記載のレーダ目標追尾装置。
【請求項3】
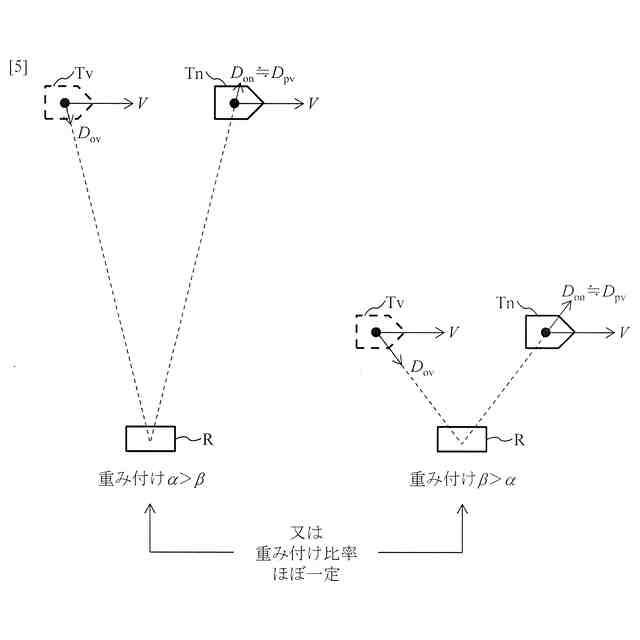
前記スキャン間相関部は、(1)前記着目目標のレーダからの距離が遠いほど、前記予測ドップラ速度変化率に対する重み付けを前記受信電力変化率に対する重み付けと比べて大きくする一方で、前記着目目標のレーダからの距離が近いほど、前記受信電力変化率に対する重み付けを前記予測ドップラ速度変化率に対する重み付けと比べて大きくする、又は、(2)前記着目目標のレーダからの距離によらず、前記予測ドップラ速度変化率に対する重み付けと前記受信電力変化率に対する重み付けとの間の比率をほぼ一定とする
ことを特徴とする、請求項2に記載のレーダ目標追尾装置。
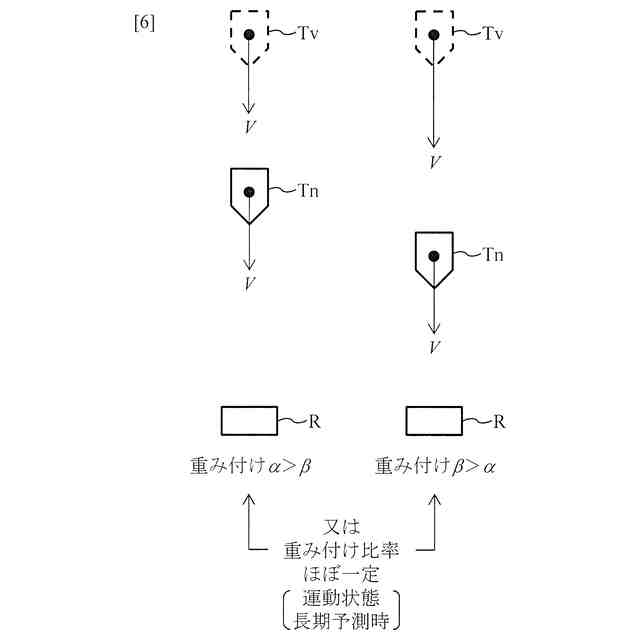
【請求項4】
前記スキャン間相関部は、(1)前記着目目標の運動状態が一定速度状態であるほど、前記予測ドップラ速度変化率に対する重み付けを前記受信電力変化率に対する重み付けと比べて大きくする一方で、前記着目目標の運動状態が急加減速状態であるほど、前記受信電力変化率に対する重み付けを前記予測ドップラ速度変化率に対する重み付けと比べて大きくする、又は、(2)前記目標位置予測部が、過去の複数回のレーダスキャンに基づいて、前記着目目標の運動状態が一定速度状態及び急加減速状態のいずれであるかを予測しているときには、前記着目目標の運動状態によらず、前記予測ドップラ速度変化率に対する重み付けと前記受信電力変化率に対する重み付けとの間の比率をほぼ一定とする
ことを特徴とする、請求項2に記載のレーダ目標追尾装置。
【請求項5】
請求項1から4のいずれかに記載のレーダ目標追尾装置が備える各処理部が実行する各処理ステップを、コンピュータに実行させるためのレーダ目標追尾プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、レーダを用いて目標を追尾する技術に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
レーダを用いて目標を追尾する技術が特許文献1等に開示されている。特許文献1では、各回のレーダスキャンにおいて、検出点をクラスタリングし、各目標の位置、観測ドップラ速度及びレーダの送受信装置の受信強度を検出する。そして、各回のレーダスキャンにおいて、次回のレーダスキャンに備えて、各目標の位置及びドップラ速度を予測し、各目標の予測位置を中心として、各目標の予測ゲートを設定する。さらに、各回のレーダスキャンにおいて、着目目標の予測ゲートの内部にある各目標のうちの、着目目標の予測位置に最も近い目標を、着目目標に紐付ける。
【0003】
ただし、各回のレーダスキャンにおいて、着目目標の予測位置からの距離が等しいとともに、レーダの送受信装置の受信強度が等しい各目標が、複数存在することがある。そこで、各回のレーダスキャンにおいて、これらの複数存在する各目標のうちの、着目目標の予測ドップラ速度に最も近い観測ドップラ速度を有する目標を、着目目標に紐付ける。
【先行技術文献】
【特許文献】
【0004】
特開2002-341025号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
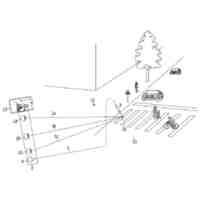
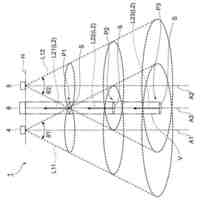
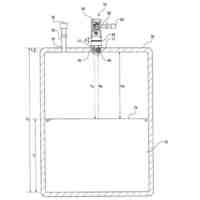
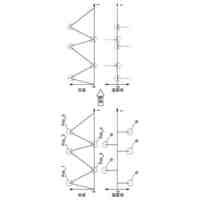
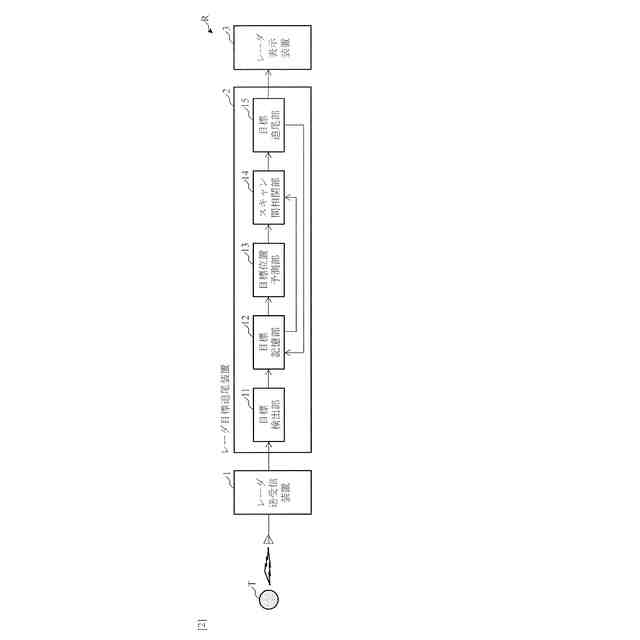
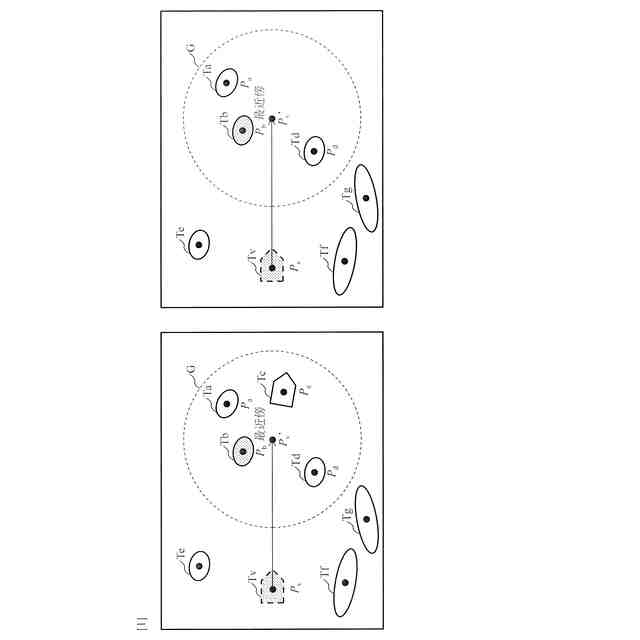
従来技術のレーダ目標追尾処理の具体例を図1に示す。図1では、前回のレーダスキャンにおいて、着目目標Tvの検出位置はP
v
であり、最新のレーダスキャンにおいて、着目目標Tvの予測位置はP
v
’であり、着目目標Tvの予測ゲートGが設定される。そして、最新のレーダスキャンにおいて、着目目標Tvの予測ゲートGの内部では、目標Ta、Tb、Tc、Tdの検出位置は、P
a
、P
b
、P
c
、P
d
であり(右欄では目標Tcが不存在)、着目目標Tvの予測ゲートGの外部では、目標Te、Tf、Tgが存在する。
【0006】
図1では、着目目標Tv及び目標Tcは、船舶又は航空機等であり(右欄では目標Tcが何らかの理由(自物標の潜水による要因、自物標と別物標との位置関係・運動状態による偶発的要因又はレーダの信号処理における何らかの要因等)によりレーダで観測できない)、目標Ta、Tb、Td、Te、Tf、Tgは、波又は雲等によるクラッタである。すると、クラッタの密度が高いときには、クラッタである目標Tbが、着目目標Tvの予測位置P
v
’に最も近く、着目目標Tvに誤って紐付けられる可能性が高い。そして、クラッタである目標Tbが、次回以降のレーダスキャンにおいて誤追尾される可能性が高い。一方で、着目目標Tvの予測ゲートGが狭いときには、クラッタである目標Tbが、着目目標Tvに誤って紐付けられる可能性が低い。しかし、着目目標Tvの予測位置P
v
’が、高精度に予測されなければ、目標Tcの検出位置P
c
が、着目目標Tvの予測ゲートGの内部に存在せず、着目目標Tvの追尾処理が、途絶える可能性が高い。
【0007】
そこで、前記課題を解決するために、本開示は、レーダを用いて船舶又は航空機等の目標を追尾するにあたり、波又は雲等によるクラッタの密度が高いときでも、クラッタを着目目標に誤って紐付ける可能性を低くするとともに、着目目標の予測ゲートを狭めずに、着目目標の追尾処理を途絶えさせる可能性を低くすることを目的とする。
【課題を解決するための手段】
【0008】
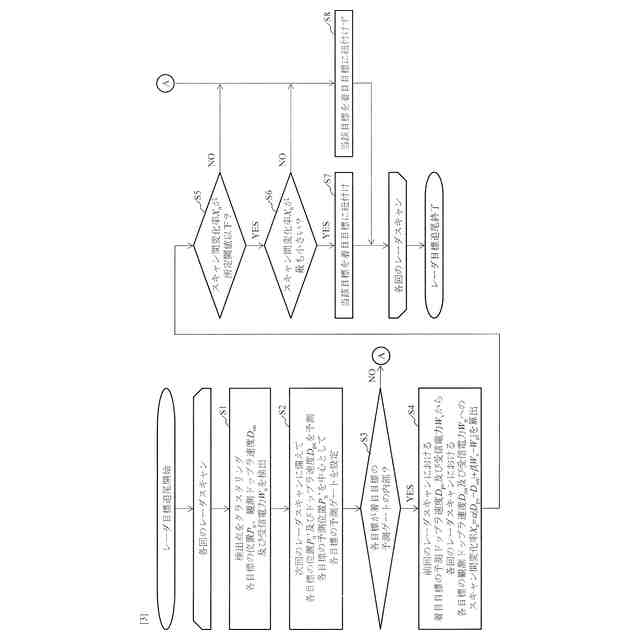
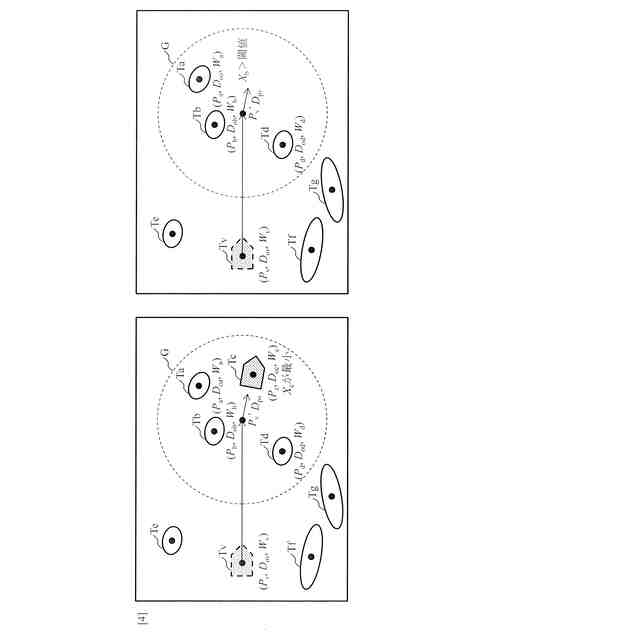
前記課題を解決するために、レーダスキャン毎(例えば、数秒程度)に、各目標の予測・観測ドップラ速度及び/又は受信電力が、急激に変化しないことに注目する。つまり、着目目標の予測ゲートの内部にある各目標について、前回のレーダスキャンにおける着目目標の予測ドップラ速度及び/又は受信電力から、各回のレーダスキャンにおける各目標の観測ドップラ速度及び/又は受信電力への、スキャン間変化率を算出する。そして、着目目標の予測ゲートの内部にある各目標のうちの、スキャン間変化率が最も小さい目標を、着目目標に紐付ける。ここで、着目目標の予測ゲートの内部にある各目標であれば、着目目標の予測位置からの距離によらず対等に扱い、予測・観測ドップラ速度及び/又は受信電力のスキャン間変化率に注目する。
【0009】
具体的には、本開示は、各回のレーダスキャンにおいて、検出点をクラスタリングし、各目標の位置を検出し、各目標の観測ドップラ速度及び受信電力の少なくともいずれかを検出する目標検出部と、各回のレーダスキャンにおいて、次回のレーダスキャンに備えて、各目標の位置を予測し、必要に応じて各目標のドップラ速度を予測し、各目標の予測位置を中心として、各目標の予測ゲートを設定する目標位置予測部と、各回のレーダスキャンにおいて、着目目標の予測ゲートの内部にある各目標について、前回のレーダスキャンにおける前記着目目標の予測ドップラ速度及び受信電力の少なくともいずれかから、各回のレーダスキャンにおける各目標の観測ドップラ速度及び受信電力の少なくともいずれかへの、スキャン間変化率を算出するスキャン間相関部と、各回のレーダスキャンにおいて、前記着目目標の予測ゲートの内部にある各目標のうちの、前記スキャン間変化率が最も小さい目標を、前記着目目標に紐付ける目標追尾部と、を備えることを特徴とするレーダ目標追尾装置である。
【0010】
この構成によれば、船舶又は航空機等の着目目標の予測ゲートの内部にある各目標について、予測・観測ドップラ速度及び/又は受信電力のスキャン間変化率に注目するため、波又は雲等によるクラッタの密度が高いときでも、クラッタを着目目標に誤って紐付ける可能性を低くすることができる。そして、船舶又は航空機等の着目目標の予測ゲートの内部にある各目標であれば、着目目標の予測位置からの距離によらず対等に扱うため、着目目標の予測ゲートを狭めずに、着目目標の追尾処理を途絶えさせる可能性を低くすることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本無線株式会社
移動体姿勢計測装置及び移動体姿勢計測プログラム
9日前
日本無線株式会社
レーダ目標追尾装置及びレーダ目標追尾プログラム
18日前
個人
通電検査装置
3日前
個人
光フアィバー距離計測器
5日前
個人
光フアィバー距離計測器
5日前
株式会社ハシマ
検針機
2日前
富士電機株式会社
放射線検出器
4日前
DIC株式会社
測定装置
4日前
矢崎総業株式会社
電流センサ
3日前
ダイハツ工業株式会社
凹部の深さ測定方法
2日前
スタンレー電気株式会社
車両前方視認装置
2日前
スタンレー電気株式会社
車両前方視認装置
2日前
本田技研工業株式会社
物体検出装置
2日前
本田技研工業株式会社
物体検出装置
2日前
株式会社テイエルブイ
厚さ測定装置及び厚さ測定方法
4日前
株式会社JVCケンウッド
撮像装置及び測距方法
2日前
浜松ホトニクス株式会社
分光計測装置
3日前
日東建設株式会社
ボルト・ナットの健全性検査装置
2日前
セイコーエプソン株式会社
電子デバイス
3日前
株式会社キーエンス
レベル計
2日前
住友電気工業株式会社
光モジュール
2日前
倉敷化工株式会社
動特性測定装置
2日前
株式会社ケー・エフ・シー
モルタル流動性試験システム
2日前
個人
位置決め具及び位置決め具付きコンベックスルール
2日前
株式会社キーエンス
レベル計
2日前
株式会社キーエンス
レベル計
2日前
株式会社キーエンス
レベル計
2日前
株式会社キーエンス
レベル計
2日前
学校法人東京理科大学
計測方法
3日前
SWCC株式会社
温度測定方法
2日前
トヨタ自動車株式会社
情報処理装置
4日前
浜松ホトニクス株式会社
分光分析装置
3日前
株式会社SUBARU
データ処理装置
3日前
トヨタ自動車株式会社
劣化検知方法
3日前
東光東芝メーターシステムズ株式会社
電力量計
3日前
ヒロセ電機株式会社
磁気センサおよび磁気センサ装置
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ