TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025043252
公報種別
公開特許公報(A)
公開日
2025-03-28
出願番号
2024072972
出願日
2024-04-26
発明の名称
移動体姿勢計測装置及び移動体姿勢計測プログラム
出願人
日本無線株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G01B
21/22 20060101AFI20250321BHJP(測定;試験)
要約
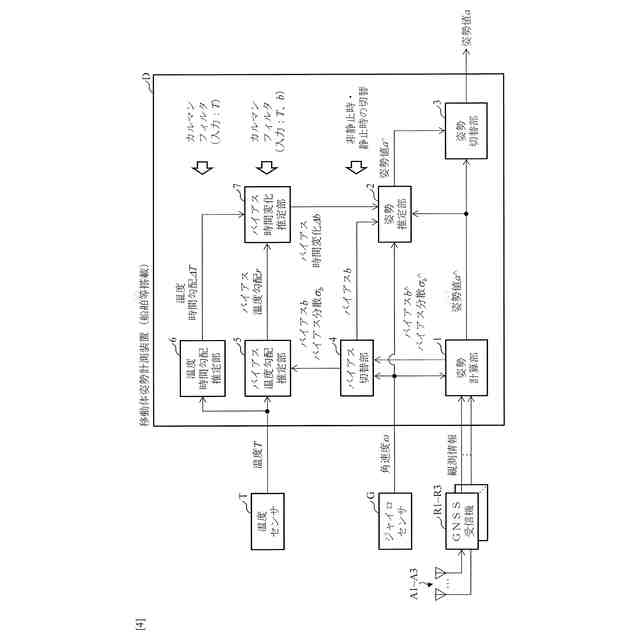
【課題】GNSSコンパスにおいて、GNSS測位航法不能状態が長時間にわたるときに、ジャイロセンサの温度が時間変化したために、ジャイロセンサのバイアスがドリフトしたとしても、移動体の姿勢値の推定誤差を減少させることを目的とする。
【解決手段】ジャイロセンサGのバイアス温度勾配r及びバイアス所定温度切片b
0
に関する状態空間モデルの状態方程式と、ジャイロセンサGのバイアスb、バイアス分散σ
b
、温度T、バイアス温度勾配r及びバイアス所定温度切片b
0
に関する状態空間モデルの観測方程式と、に基づいて、ジャイロセンサGのバイアス温度勾配rを推定する。
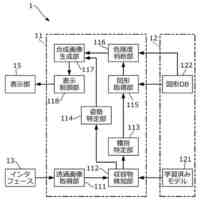
【選択図】図4
特許請求の範囲
【請求項1】
GNSS測位航法可能状態において、GNSS受信機の観測情報に基づいて、前記GNSS受信機を搭載する移動体の姿勢情報を計算する姿勢計算部と、
GNSS測位航法不能状態において、ジャイロセンサの角速度情報に基づいて、前記ジャイロセンサを搭載する前記移動体の姿勢情報を推定する姿勢推定部と、
前記ジャイロセンサのバイアス温度勾配及びバイアス所定温度切片に関する状態空間モデルの状態方程式と、前記ジャイロセンサのバイアス、バイアス分散、温度、バイアス温度勾配及びバイアス所定温度切片に関する状態空間モデルの観測方程式と、に基づいて、前記ジャイロセンサのバイアス温度勾配を推定するバイアス温度勾配推定部と、
前記ジャイロセンサのバイアス温度勾配及び温度時間勾配に基づいて、前記ジャイロセンサのバイアス時間変化を推定するバイアス時間変化推定部と、を備え、
前記姿勢推定部は、前記ジャイロセンサの角速度情報、バイアス及びバイアス時間変化と、直近の前記GNSS測位航法可能状態での前記移動体の姿勢情報と、に基づいて、現在の前記GNSS測位航法不能状態での前記移動体の姿勢情報を推定する
ことを特徴とする移動体姿勢計測装置。
続きを表示(約 1,800 文字)
【請求項2】
前記姿勢計算部は、前記GNSS受信機の観測情報及び前記ジャイロセンサの角速度情報に基づいて、前記ジャイロセンサのバイアス及びバイアス分散を計算し、
前記ジャイロセンサの角速度情報の角速度変化状態において、前記姿勢計算部が計算した前記ジャイロセンサのバイアス及びバイアス分散を、それぞれ前記ジャイロセンサのバイアス及びバイアス分散として、前記バイアス温度勾配推定部に出力するバイアス切替部、
をさらに備えることを特徴とする、請求項1に記載の移動体姿勢計測装置。
【請求項3】
前記ジャイロセンサの角速度情報の角速度一定状態において、前記ジャイロセンサの角速度情報及び静止状態でのバイアス分散を、それぞれ前記ジャイロセンサのバイアス及びバイアス分散として、前記バイアス温度勾配推定部に出力するバイアス切替部、
をさらに備えることを特徴とする、請求項1に記載の移動体姿勢計測装置。
【請求項4】
前記ジャイロセンサの温度、温度時間勾配及び温度時間勾配に対するプロセス雑音に関する状態空間モデルの状態方程式と、前記ジャイロセンサの温度及び温度に対する観測雑音に関する状態空間モデルの観測方程式と、に基づいて、前記ジャイロセンサの温度時間勾配を推定し、前記バイアス時間変化推定部に出力する温度時間勾配推定部、
をさらに備えることを特徴とする、請求項1から3のいずれかに記載の移動体姿勢計測装置。
【請求項5】
前記バイアス温度勾配推定部は、前記ジャイロセンサのバイアス温度勾配及びバイアス所定温度切片に関する、時間経過に応じた忘却効果を考慮した状態空間モデルの状態方程式に基づいて、前記ジャイロセンサのバイアス温度勾配を推定する
ことを特徴とする、請求項1から3のいずれかに記載の移動体姿勢計測装置。
【請求項6】
前記バイアス温度勾配推定部は、観測残差の共分散で正規化した観測残差が、所定閾値未満(以上)であるときに、前記ジャイロセンサのバイアスが正常(異常)であると判断し、前記ジャイロセンサのバイアス温度勾配の推定を実行(中止)する
ことを特徴とする、請求項1から3のいずれかに記載の移動体姿勢計測装置。
【請求項7】
前記姿勢計算部は、前記ジャイロセンサの角速度情報と、前記移動体の姿勢情報に関する状態空間モデルの状態方程式と、に基づいて、前記移動体の姿勢情報の予測値を計算し、前記GNSS受信機の観測情報と、前記移動体の姿勢情報に関する状態空間モデルの観測方程式と、に基づいて、前記移動体の姿勢情報の姿勢値を計算し、
前記移動体の姿勢情報の姿勢値に基づいて、前記ジャイロセンサの角速度情報を航法座標系の角速度情報に変換し、前記移動体の回転速度を計算する第1回転速度計算部と、
前記移動体の姿勢情報の直近の姿勢値と、前記移動体の姿勢情報のさらに以前の姿勢値と、に基づいて、前記移動体の回転速度を計算する第2回転速度計算部と、
前記第1回転速度計算部が計算した前記移動体の回転速度を、前記第2回転速度計算部が計算した前記移動体の回転速度で除算し、前記ジャイロセンサのジャイロ感度(角速度の計測値と真値との間の比率-1)を推定するジャイロ感度推定部と、
を備えることを特徴とする、請求項1に記載の移動体姿勢計測装置。
【請求項8】
前記第1回転速度計算部及び前記第2回転速度計算部は、前記移動体の回転速度に対して、ローパスフィルタ処理を実行し、突発的な高周波雑音を抑圧し、及び/又は、前記ジャイロ感度推定部は、前記ジャイロセンサのジャイロ感度に対して、ローパスフィルタ処理を実行し、突発的な高周波雑音を抑圧する
ことを特徴とする、請求項7に記載の移動体姿勢計測装置。
【請求項9】
前記姿勢推定部は、GNSS測位航法不能状態において、前記ジャイロセンサの角速度情報及びジャイロ感度に基づいて、前記移動体の姿勢情報を補正する
ことを特徴とする、請求項7又は8に記載の移動体姿勢計測装置。
【請求項10】
請求項1又は7に記載の移動体姿勢計測装置が備える、各処理部が行なう各処理ステップを、コンピュータに実行させるための移動体姿勢計測プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動体の姿勢情報を計測する技術に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
GNSS受信機の観測情報又はジャイロセンサの角速度情報に基づいて、GNSS受信機及びジャイロセンサを搭載する移動体の姿勢情報を計算又は推定する技術が、特許文献1、2等に開示されている。
【0003】
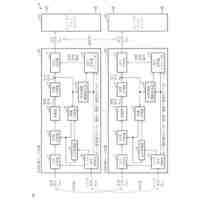
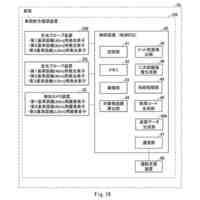
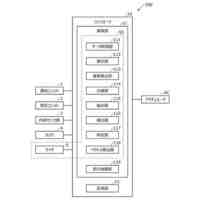
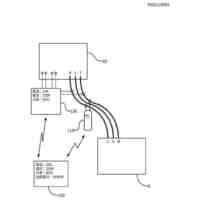
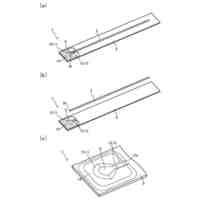
従来技術の移動体姿勢計測装置の構成を図1、2に示す。従来技術の移動体姿勢計測装置Dは、船舶等に搭載され、受信アンテナA1~A3、GNSS受信機R1~R3、ジャイロセンサG及び温度センサTに接続され、姿勢計算部1、姿勢推定部2及び姿勢切替部3を備える。図1、2では、特許文献1、2に開示された従来技術を示す。
【0004】
姿勢計算部1は、GNSS測位航法可能状態(衛星信号の受信状態及び捕捉衛星数の充足状態)において、GNSS測位航法を実行する。つまり、姿勢計算部1は、GNSS受信機の観測情報に基づいて、GNSS受信機を搭載する移動体の姿勢値a^を計算する。そして、姿勢計算部1は、GNSS受信機の観測情報及びジャイロセンサGの角速度ωに基づいて、ジャイロセンサGのバイアスb^を計算する。
【0005】
姿勢推定部2は、GNSS測位航法不能状態(衛星信号の遮断状態又は捕捉衛星数の不足状態)において、推測航法を実行する。つまり、姿勢推定部2は、ジャイロセンサGの角速度ωに基づいて、ジャイロセンサGを搭載する移動体の姿勢値a’を推定する。ここで、姿勢推定部2は、ジャイロセンサGの角速度ω及びバイアスb^(姿勢計算部1が直近に計算)と、直近のGNSS測位航法可能状態での移動体の姿勢値a^に基づいて、現在のGNSS測位航法不能状態での移動体の姿勢値a’を推定する。
【0006】
姿勢切替部3は、GNSS測位航法可能状態において、移動体の姿勢値a^を移動体の姿勢値aとして出力する。そして、姿勢切替部3は、GNSS測位航法不能状態において、移動体の姿勢値a’を移動体の姿勢値aとして出力する。
【先行技術文献】
【特許文献】
【0007】
特開平04-364422号公報
特開2002-303533号公報
特開2023-136095号公報
特許第3635145号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
ところで、図3に示すように、ジャイロセンサGの温度Tが時間変化したときに、ジャイロセンサGのバイアスbがドリフトしてしまう。よって、姿勢推定部2は、GNSS測位航法不能状態が長時間にわたるときに、ジャイロセンサGの角速度ωの時間積算に対して、ジャイロセンサGのバイアスbのドリフトを補正しなければ、移動体の姿勢値a’の推定誤差を増大させてしまう。
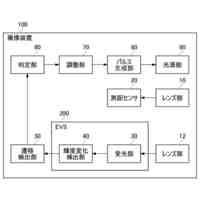
【0009】
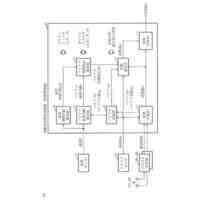
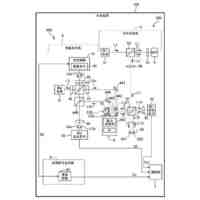
そこで、図1では、姿勢推定部2は、温度特性マップを用いて、ジャイロセンサGのバイアスbのドリフトを求め、角速度ωを補正する。ここで、温度特性マップは、ジャイロセンサGの温度Tを入力とし、ジャイロセンサGのバイアスbのドリフトを出力とする。しかし、温度特性マップは、移動体の静止状態において、ジャイロセンサGの角速度ω(本来は0である)及びバイアスbの等価性(図3の下段を参照)に基づいて、作成され又は更新される。よって、温度特性マップは、移動体の非静止状態において、作成又は更新することができず、静止時間が短い場合は、温度特性マップの粒度が粗くなることで、補正誤差が生じる。また、温度特性マップは、ジャイロセンサGの温度Tの入力に重畳する雑音により、ジャイロセンサGのバイアスbのドリフトの出力に雑音を重畳させてしまう。このため、 静止時間が短い場合や温度誤差が大きい場合は、角速度ωの補正に誤差が生じることで、移動体の姿勢値a’の推定誤差を増大させてしまう。
【0010】
一方で、図2では、姿勢推定部2は、カルマンフィルタを用いて、ジャイロセンサGのバイアスbの温度勾配を推定し、推定した温度勾配に基づいて計算したバイアスbのドリフトで角速度ωを補正する。ここで、カルマンフィルタは、ジャイロセンサGの温度T及びバイアスbの差分量(短時間にわたる変化量)を入力とする。そして、バイアスbの温度勾配は、移動体の静止状態において、ジャイロセンサGの角速度ω(本来は0である)及びバイアスbの等価性(図3の下段を参照)に基づいて、カルマンフィルタで予測し及び更新される。よって、バイアスbの温度勾配は、移動体の非静止状態において、予測及び更新することができず、静止時間が短い場合は、十分な精度のバイアスbの温度勾配を求めることができない。さらに、ジャイロセンサGの温度T及びバイアスbに重畳する雑音により、状態空間モデルの観測方程式に設定されるこれらの差分量(短時間にわたる変化量)又は差分量同士の比率(バイアスbの温度勾配)には、分散の加法性に基づく雑音が重畳するため、推定する温度勾配の誤差が増大する。このため、静止時間が短い場合や、温度T及びバイアスbの誤差が大きい場合は、角速度ωに補正誤差が生じ、移動体の姿勢値a’の推定誤差が増大してしまう。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本無線株式会社
イベント管理システム、イベント管理方法
1日前
日本無線株式会社
位相同期ループ回路及びフェーズドアレイアンテナ
2日前
日本無線株式会社
移動体姿勢計測装置及び移動体姿勢計測プログラム
13日前
個人
通電検査装置
7日前
日本精機株式会社
位置検出装置
3日前
株式会社ハシマ
検針機
6日前
東レ株式会社
シート状物の検査方法
1日前
エイブリック株式会社
電流検出回路
今日
東ソー株式会社
自動分析装置及び方法
3日前
株式会社チノー
放射光測温装置
今日
日本特殊陶業株式会社
ガスセンサ
今日
株式会社 キョーワ
食品搬送装置
今日
日本特殊陶業株式会社
ガスセンサ
今日
日本碍子株式会社
ガスセンサ
今日
富士電機株式会社
エンコーダ
1日前
DIC株式会社
測定装置
8日前
株式会社ヨコオ
シートコンタクタ
3日前
TDK株式会社
温度センサ
1日前
スタンレー電気株式会社
車両前方視認装置
6日前
シチズンファインデバイス株式会社
圧力検出装置
今日
スタンレー電気株式会社
車両前方視認装置
6日前
オムロン株式会社
光電センサ
今日
ダイハツ工業株式会社
凹部の深さ測定方法
6日前
本田技研工業株式会社
物体検出装置
6日前
シチズンファインデバイス株式会社
圧力検出装置
今日
本田技研工業株式会社
物体検出装置
6日前
矢崎総業株式会社
電流センサ
7日前
TDK株式会社
センサデバイス
今日
株式会社ミツバ
モータ制御装置
今日
旭光電機株式会社
電気的特性提供装置
今日
セイコーエプソン株式会社
干渉計
3日前
JRCモビリティ株式会社
充電用温度判定回路
3日前
日本信号株式会社
表示装置
1日前
内山工業株式会社
分析装置用部材
2日前
株式会社JVCケンウッド
撮像装置及び測距方法
6日前
TDK株式会社
センサ
1日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ