TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025037600
公報種別
公開特許公報(A)
公開日
2025-03-18
出願番号
2023144610
出願日
2023-09-06
発明の名称
搬送ロボット管理装置、搬送ロボット管理方法、および搬送ロボット管理プログラム
出願人
株式会社東芝
,
東芝インフラシステムズ株式会社
代理人
弁理士法人鈴榮特許綜合事務所
主分類
B65G
1/137 20060101AFI20250311BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】優先度が高いAGVに対して、他のAGVとの接触のリスクを低減しつつ、到着時間が短くなるような経路を選択する。
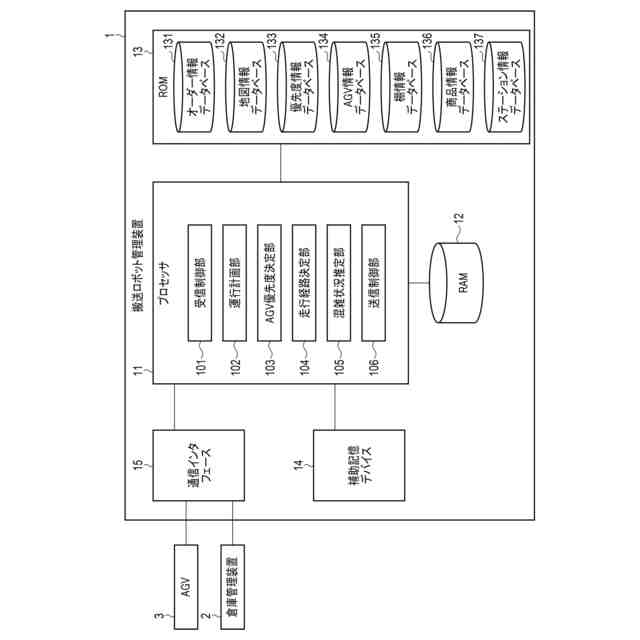
【解決手段】実施形態に係る搬送ロボット管理装置は、AGV情報を記憶するAGV情報データベースと、AGVの現在位置に基づいて推定された混雑度と、地図情報を記憶する地図情報データベースと、外部システムから取得したオーダーリスト、AGV情報、および地図情報に基づいて、搬送に使用するAGVを決定し、決定したAGVが移動すべき目的地を決定する運行計画部と、AGV情報、オーダー情報、ステーション情報及び商品情報のうち少なくとも一つに基づいて決定したAGVの優先度を決定する優先度決定部と、優先度および混雑度に基づいて、目的地までの決定したAGVの走行経路を決定する走行経路決定部と、走行経路を含む走行経路情報を決定したAGVに送信する送信部と、を備える。
【選択図】 図1
特許請求の範囲
【請求項1】
無人搬送車(AGV)の現在位置を含むAGV情報を記憶するAGV情報データベースと、
前記AGVの現在位置に基づいて推定された混雑度と、前記AGVが走行可能な搬送エリアとを含む地図情報を記憶する地図情報データベースと、
外部システムから取得したオーダーリストに基づくオーダー情報、前記AGV情報、および前記地図情報に基づいて、搬送に使用するAGVを決定し、前記決定したAGVが移動すべき目的地を決定する運行計画部と、
前記AGV情報、前記オーダー情報、ステーションでの作業状況を含むステーション情報及び商品の重量、寸法、取り扱い重要度を含む商品情報のうち少なくとも一つに基づいて前記決定したAGVの優先度を決定する優先度決定部と、
前記優先度および前記混雑度に基づいて、前記目的地までの前記決定したAGVの走行経路を決定する走行経路決定部と、
前記走行経路を前記決定したAGVに送信する送信部と、
を備える、搬送ロボット管理装置。
続きを表示(約 900 文字)
【請求項2】
稼働中の複数のAGVそれぞれから位置情報を取得し、前記位置情報に基づいて前記混雑度を推定する混雑状況推定部をさらに備える、
請求項1に記載の搬送ロボット管理装置。
【請求項3】
前記混雑状況推定部は、前記複数のAGVが検出した他の移動体の情報にさらに基づいて前記混雑度を推定する、
請求項2に記載の搬送ロボット管理装置。
【請求項4】
前記混雑状況推定部は、過去の実績データにさらに基づいて混雑度を推定する、
請求項2に記載の搬送ロボット管理装置。
【請求項5】
前記混雑状況推定部は、前記AGV情報に基づいて前記複数のAGVそれぞれの滞留時間に応じて前記混雑度を増加させる、
請求項2に記載の搬送ロボット管理装置。
【請求項6】
前記優先度決定部は、前記優先オーダーの有無、前記棚情報、前記商品情報、前記ステーション情報に点数付けし、前記点数の総和を前記優先度とする、
請求項1に記載の搬送ロボット管理装置。
【請求項7】
前記優先度決定部は、AGV情報に含まれる前記AGVが棚を持っているかどうかを示す情報に基づいて前記優先度を決定する、
請求項1に記載の搬送ロボット管理装置。
【請求項8】
前記優先度決定部は、前記オーダー情報に含まれる優先オーダーに基づいて前記優先度を決定する、
請求項1に記載の搬送ロボット管理装置。
【請求項9】
前記優先度決定部は、商品情報に含まれる取り扱い重要度、処理時間目安に基づいて前記優先度を決定する、
請求項1に記載の搬送ロボット管理装置。
【請求項10】
前記優先度決定部は、前記ステーション情報に含まれるピッキングステーションに待機しているAGVの数、前記ピッキングステーションにおける作業手段の進捗状況にさらに基づいて前記優先度を決定する、
請求項1に記載の搬送ロボット管理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、搬送ロボット管理装置、搬送ロボット管理方法、および搬送ロボット管理プログラムに関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
倉庫などに導入される搬送ロボットシステムでは、商品が保管されている棚をできるだけ早く安全に搬送することが求められる。搬送ロボットシステムでは、他の無人搬送車(AGV:Automated Guided Vehicle)との衝突を回避するために、事前の計画では予定されていない緊急停止が実行されることがある。緊急停止が発生すると、棚が倒壊するリスクまたは搬送が遅れるリスクがある。
【0003】
例えば、特許文献1では、運搬車両をより安全に走行させることが可能な走行制御システムを提供する技術が開示されている。
【0004】
また、棚の倒壊リスクなどに基づいて棚の優先度を決定し、優先度に応じて棚を運搬するAGVの走行経路を変更することも考えられる。このような場合、まず保管されている商品情報に基づいて棚の優先度を決定する。次に運搬が指示された棚の優先度が高い場合には、優先通路を通るようなAGVの走行経路を設定する。このとき、運搬された棚の優先度が低い場合には、優先通路を避ける形で走行経路が設定される。棚の優先度に応じてAGVの走行経路を分けることで、優先度が高い棚を運ぶAGVが他のAGVと接近するリスクを抑えることが可能である。これにより、運搬が遅れたり、棚が倒壊したりする可能性を低減することができる。
【先行技術文献】
【特許文献】
【0005】
特開2020-166737号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
商品の入出庫が頻繁に行われる場合、商品を保管する棚を運搬するためのAGV台数が増加する。AGV台数が増加した場合、 優先通路の場所を適切に設定しないと、AGVが優先通路の周辺で密集してしまうという問題がある。また、AGVが密集すると衝突回避のためにAGVが一時停止する状態が増加し、AGVの搬送速度の低下につながるという問題もある。
【0007】
この発明は、上記事情に着目してなされたもので、その目的とするところは、優先度が高いAGVに対して、他のAGVとの接触のリスクを低減しつつ、到着時間が短くなるような経路を選択することができる技術を提供することにある。
【0008】
さらに、本発明の目的とするところは、AGVの優先度と混雑度の他に、走行経路のコストも加味することで、混雑により目的地に到着する時刻が遅延するリスクと遅延が発生しなかった場合の到着時刻を考慮して、移動時間が短くなるような経路を生成することができる技術を提供することにある。
【課題を解決するための手段】
【0009】
実施形態に係る搬送ロボット管理装置は、無人搬送車(AGV)の現在位置を含むAGV情報を記憶するAGV情報データベースと、前記AGVの現在位置に基づいて推定された混雑度と、前記AGVが走行可能な搬送エリアとを含む地図情報を記憶する地図情報データベースと、外部システムから取得したオーダーリスト、前記AGV情報、および前記地図情報に基づいて、搬送に使用するAGVを決定し、前記決定したAGVが移動すべき目的地を決定する運行計画部と、前記AGV情報、前記オーダー情報、ステーションでの作業状況を含むステーション情報及び商品の重量、寸法、取り扱い重要度を含む商品情報のうち少なくとも一つに基づいて前記決定したAGVの優先度を決定する優先度決定部と、前記優先度および前記混雑度に基づいて、前記目的地までの前記決定したAGVの走行経路を決定する走行経路決定部と、前記走行経路を含む走行経路情報を前記決定したAGVに送信する送信部と、を備えるものである。
【図面の簡単な説明】
【0010】
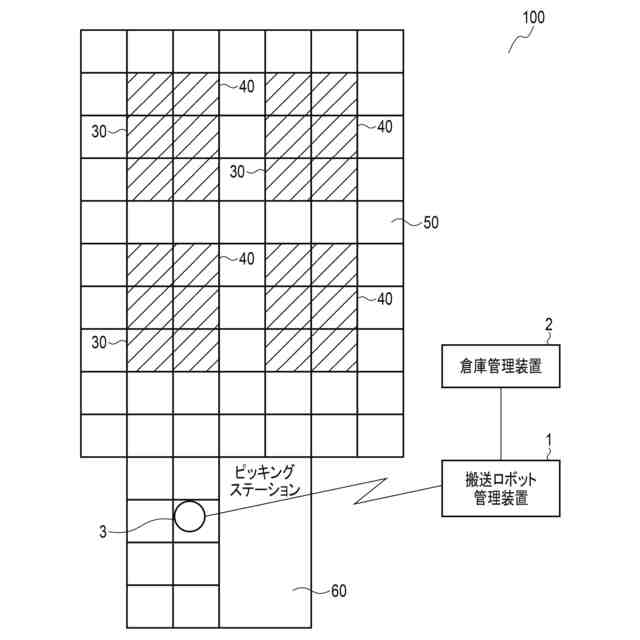
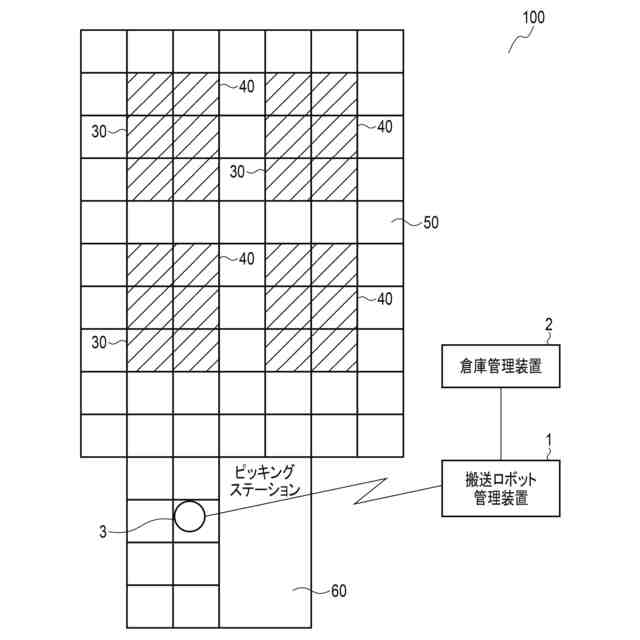
図1は、実施形態に係る搬送ロボットシステムの構成例を概念的に示す図である。
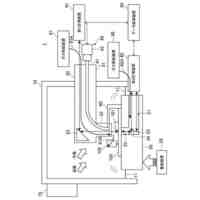
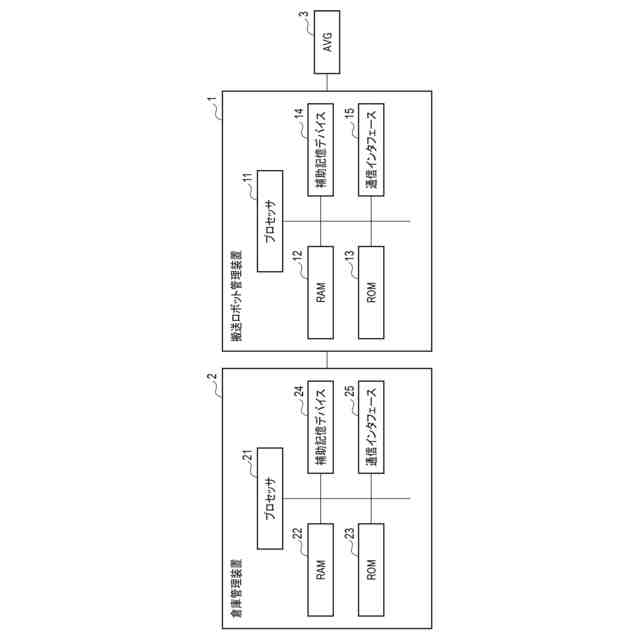
図2は、搬送ロボット管理装置および倉庫管理装置のハードウェア構成の一例を示した図である。
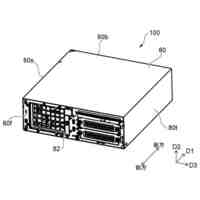
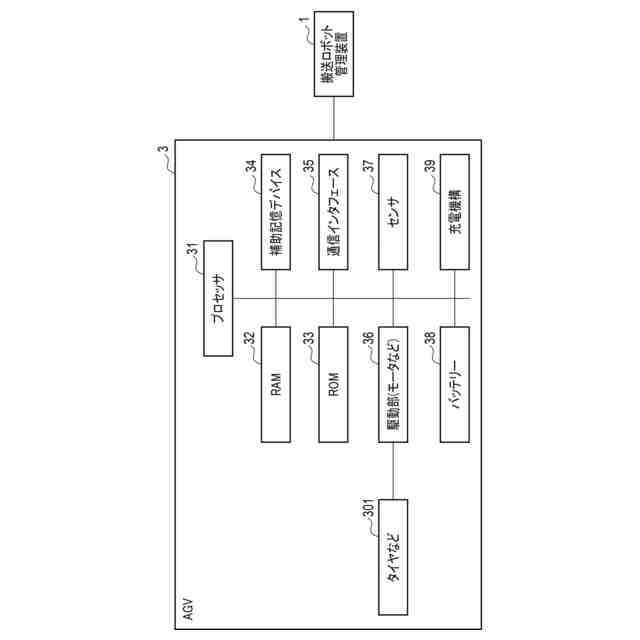
図3は、AGVのハードウェア構成の一例を示す図である。
図4は、搬送ロボット管理装置のソフトウェア構成の一例を示す図である。
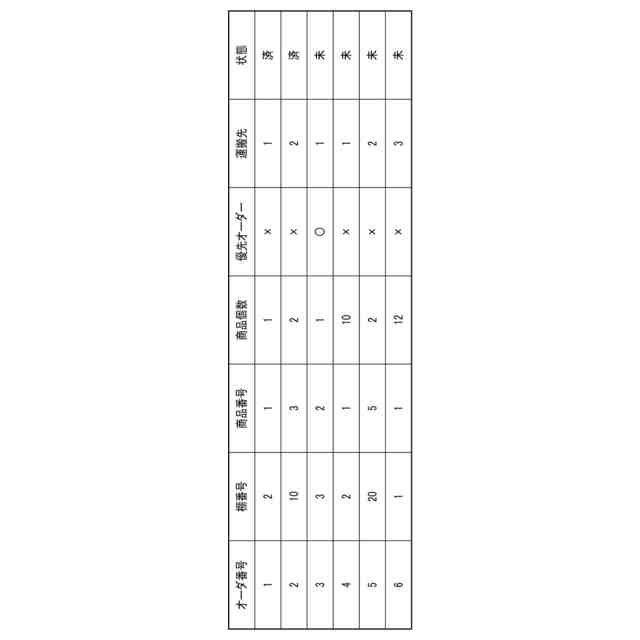
図5は、オーダー情報データベースに格納される各種データの一例を示した図である。
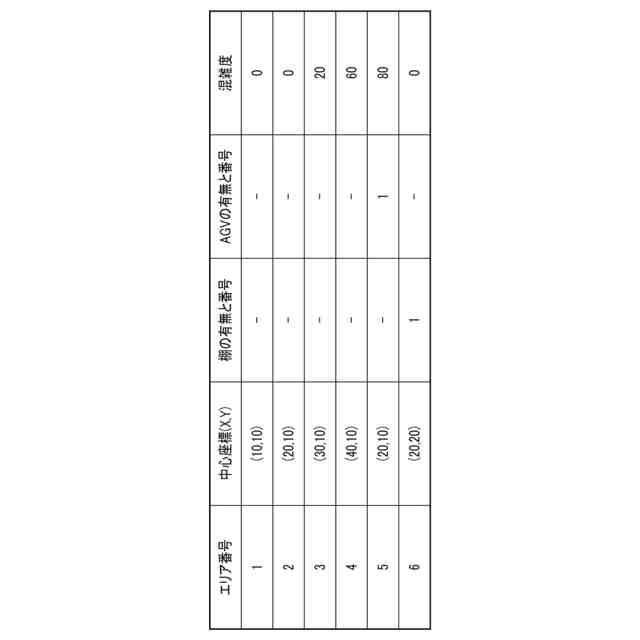
図6は、地図情報データベースが表形式で地図情報を記憶した場合のデータの一例を示す図である。
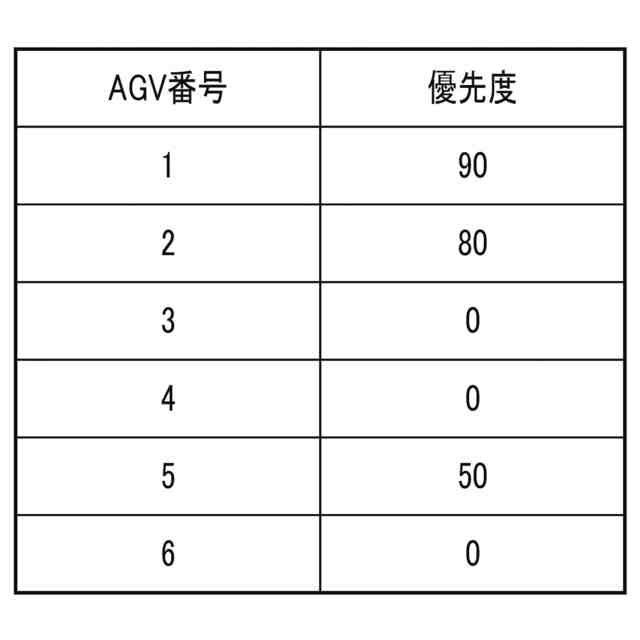
図7は、優先度情報データベースに記憶された優先度情報の一例を示した図である。
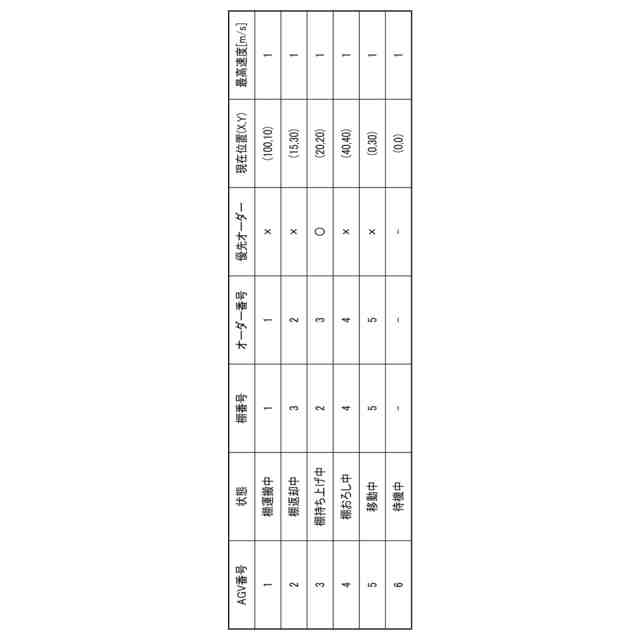
図8は、AGV情報データベースに記憶されたAGV情報の一例を示す図である。
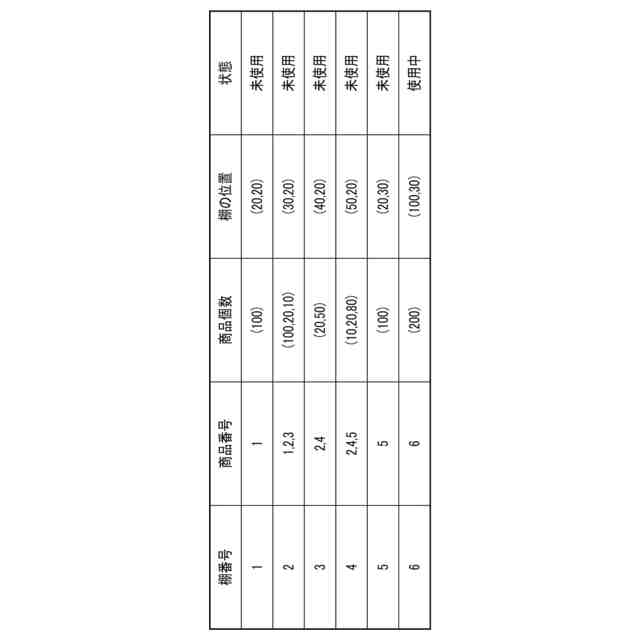
図9は、棚情報データベースに記憶された棚情報の一例を示す図である。
図10は、商品情報データベースに記憶された商品情報の一例を示す図である。
図11は、ステーション情報データベースに記憶されたステーション情報の一例を示す図である。
図12は、実施形態に係る搬送ロボット管理装置による混雑度推定動作の一例を説明するためのフローチャートである。
図13は、位置情報に基づいて推定された混雑度の一例を示した図である。
図14は、実施形態に係る搬送ロボット管理装置によるAGVの走行経路決定動作の一例を説明するためのフローチャートである。
図15は、ステップST204のさらなる詳細な動作の一例を示したフローチャートである。
図16は、優先度情報データベースに記憶される情報の一例を示す図である。
図17は、ステップST207のさらなる詳細な動作の一例を示したフローチャートである。
図18は、計画された経路の混雑度の合計値を算出する一例を示した図である。
図19は、本実施形態の効果の一例を示す図である。
図20は、AGVの移動経路の再計画方法の一例を示したフローチャートである。
図21は、実施形態の変形例に係るAGVの走行経路決定動作の一例を説明するためのフローチャートである。
図22は、実施形態の変形例を適用する場合の一例を示した図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
弁
2か月前
株式会社東芝
発券機
1日前
株式会社東芝
センサ
25日前
株式会社東芝
センサ
11日前
株式会社東芝
計算装置
6日前
株式会社東芝
計算装置
6日前
株式会社東芝
遮断装置
25日前
株式会社東芝
計測装置
19日前
株式会社東芝
電源回路
1か月前
株式会社東芝
電子装置
25日前
株式会社東芝
電子機器
18日前
株式会社東芝
計算装置
1か月前
株式会社東芝
回転電機
11日前
株式会社東芝
電子機器
18日前
株式会社東芝
試験装置
今日
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
蓄電池装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
29日前
株式会社東芝
半導体装置
6日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
ガス遮断器
1か月前
株式会社東芝
半導体装置
11日前
株式会社東芝
穴検出装置
19日前
株式会社東芝
水処理装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
11日前
株式会社東芝
半導体装置
15日前
株式会社東芝
半導体装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ