TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025037191
公報種別
公開特許公報(A)
公開日
2025-03-17
出願番号
2023144025
出願日
2023-09-05
発明の名称
容器処理システム
出願人
澁谷工業株式会社
代理人
個人
,
個人
主分類
B65B
57/04 20060101AFI20250310BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
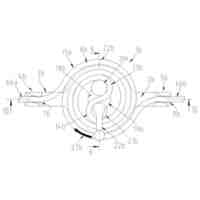
【課題】正規の搬送ラインからリジェクトされた容器を空容器と実容器に分別して収集することが可能な容器処理システムを提供する。
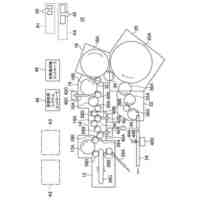
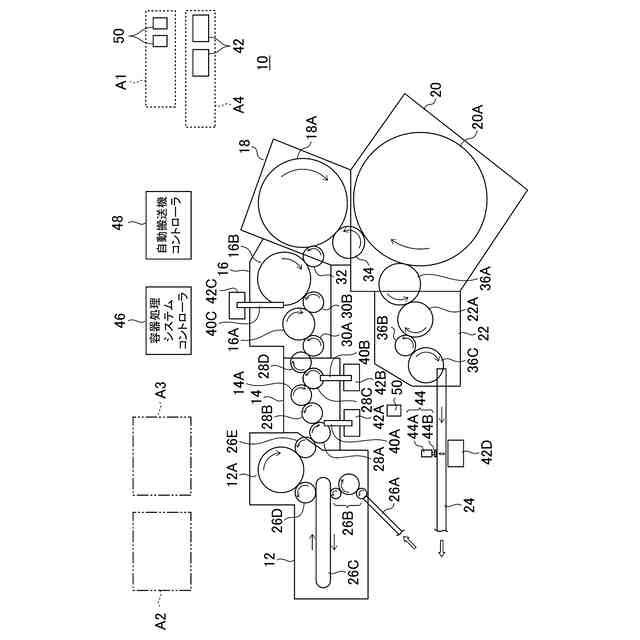
【解決手段】充填処理前に第1、第2リジェクトホイール28A、28C、エアリンサ16Bでリジェクトされた空容器を第1~第3回収箱42A~42Cに収容し、キャッピング処理後に第1リジェクト装置44、第2リジェクト装置でリジェクトされた実容器を第4回収箱42D、第5回収箱に収容する。各回収箱を自動搬送機コントローラ48により制御される自動搬送機50により移動可能とし、各回収箱に収容された容器の量を容器処理システムコントローラ46によりカウントする。各回収箱に収容された容器が所定量に達すると自動搬送機50により空容器の第1回収箱42A~42Cは空容器収集エリアA2へ、実容器の第4回収箱42D、第5回収箱は実容器収集エリアA3へ移動する。
【選択図】図1
特許請求の範囲
【請求項1】
容器を搬送する搬送手段を備え、容器を搬送しながら少なくとも充填処理およびキャッピング処理を行う容器処理システムにおいて、
前記搬送手段の所定位置に配置されたリジェクト手段と、
前記リジェクト手段によって充填処理前に前記搬送手段からリジェクトされた空容器を収容する空容器回収箱と、
前記リジェクト手段によってキャッピング処理後に前記搬送手段からリジェクトされた実容器を収容する実容器回収箱と、
前記空容器回収箱および前記実容器回収箱を移動させる自動搬送機と、
前記自動搬送機を制御する制御手段と、
前記空容器回収箱に収容される空容器および前記実容器回収箱に収容される実容器の収容量を検出する検出手段と、
前記空容器回収箱に収容された空容器を収集する空容器収集位置と、
前記実容器回収箱に収容された実容器を収集する実容器収集位置とを備え、
前記制御手段は、前記空容器回収箱に収容された空容器の収容量が所定量になると、前記自動搬送機によって前記空容器回収箱を前記空容器収集位置へ移動させるとともに、前記実容器回収箱に収容された実容器の収容量が所定量になると、前記自動搬送機によって前記実容器回収箱を前記実容器収集位置へ移動させるようにしたことを特徴とする容器処理システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、搬送される容器の良否に応じて不良品を回収する容器処理システムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
例えば飲料の製造ラインでは、ブロー成形機の後、検査ホイールの後、エアリンサの途中、キャッパの後、ラベラの後などに、不良品と判別されラインからリジェクトされた容器を回収する回収箱が各々設置されている。回収箱が満杯になったか否かは作業者の目視により確認され、手作業により空の回収箱が満杯の回収箱と置き換えられる。満杯の回収箱は、作業者により所定の容器収集位置へ移動され、回収箱内の容器は同位置において払い出される。
【0003】
一方、近年では無人化や省人化の目的から回収箱を自動で回収することが検討され、作業者の代わりにAGV(automatic guides vehicle)やAMR(autonomous mobile robot)といった自動搬送機により回収箱を移動することが考えられている。例えば特許文献1には自動搬送機により医療器材の供給・回収を行うシステムが開示されており、物品の供給や回収に自動搬送機を採用することが提案されている。
【先行技術文献】
【特許文献】
【0004】
特許第3839954号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
一方、飲料を製造する容器充填システムにおいては、搬送手段によって容器を搬送しつつ充填、キャッピング、ラベリング、ケーシング等の処理を行っている。処理の過程で不良容器が発生した際、リジェクト手段によって正規の搬送ラインから不良容器を回収箱へ収容しており、満杯となった回収箱を自動搬送機を用いて収集する場合、自動搬送機によってリジェクトされた容器を収容した回収箱を所定の収集位置へ移動させる必要がある。しかしながら、容器充填システムにおいてリジェクトされる容器は充填前の空容器と充填キャッピング後の実容器が存在し、それらを同じ収集位置で収集すると、その後の分別作業に時間がかかるといった問題が発生する。
【0006】
本発明は、正規の搬送ラインからリジェクトされた容器を空容器と実容器に分別して収集することが可能な容器処理システムを提供することを課題としている。
【課題を解決するための手段】
【0007】
本発明の第1の発明である容器処理システムは、容器を搬送する搬送手段を備え、容器を搬送しながら少なくとも充填処理およびキャッピング処理を行う容器処理システムにおいて、前記搬送手段の所定位置に配置されたリジェクト手段と、前記リジェクト手段によって充填処理前に前記搬送手段からリジェクトされた空容器を収容する空容器回収箱と、前記リジェクト手段によってキャッピング処理後に前記搬送手段からリジェクトされた実容器を収容する実容器回収箱と、前記空容器回収箱および前記実容器回収箱を移動させる自動搬送機と、前記自動搬送機を制御する制御手段と、前記空容器回収箱に収容される空容器および前記実容器回収箱に収容される実容器の収容量を検出する検出手段と、前記空容器回収箱に収容された空容器を収集する空容器収集位置と、前記実容器回収箱に収容された実容器を収集する実容器収集位置とを備え、前記制御手段は、前記空容器回収箱に収容された空容器の収容量が所定量になると、前記自動搬送機によって前記空容器回収箱を前記空容器収集位置へ移動させるとともに、前記実容器回収箱に収容された実容器の収容量が所定量になると、前記自動搬送機によって前記実容器回収箱を前記実容器収集位置へ移動させるようにしたことを特徴としている。
【発明の効果】
【0008】
本発明によれば、正規の搬送ラインからリジェクトされた容器を空容器と実容器に分別して収集することが可能な容器処理システムを提供することができる。
【図面の簡単な説明】
【0009】
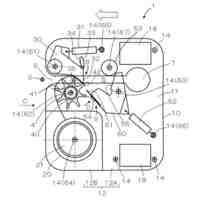
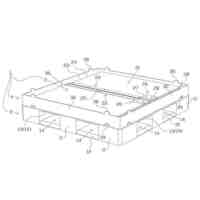
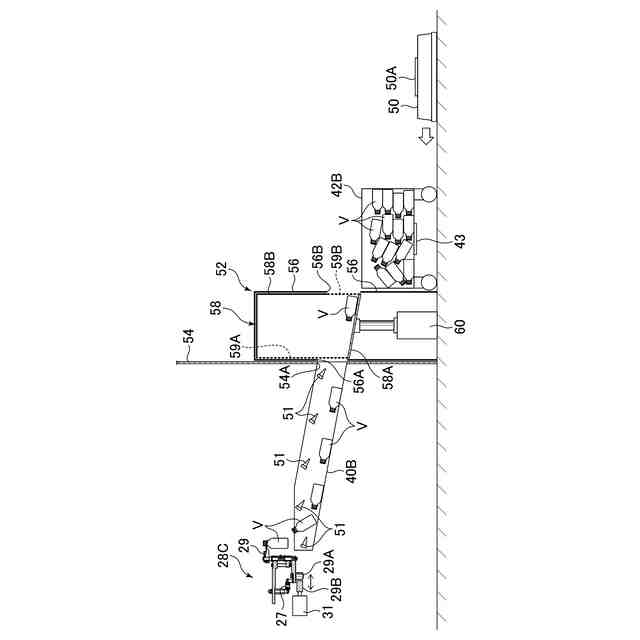
本発明の第1実施形態である容器処理システムの上流側の配置を示す平面である。
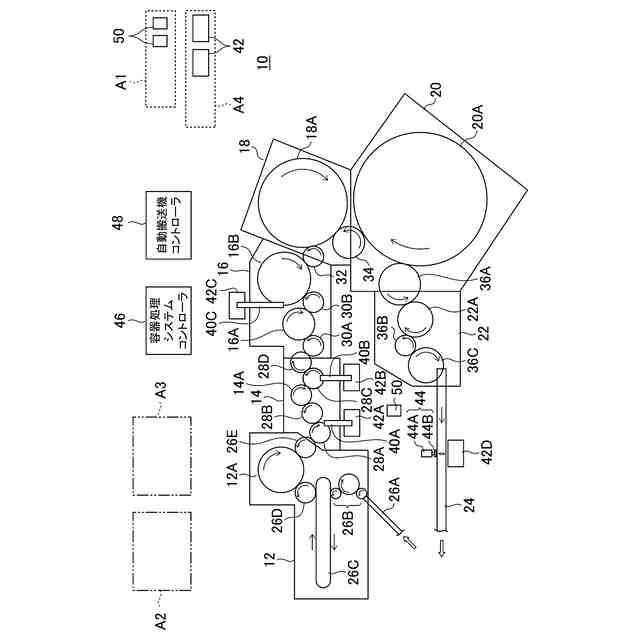
図1の容器処理システムの下流側の配置を示す平面図である。
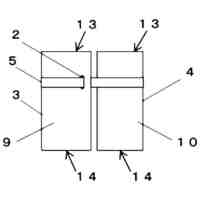
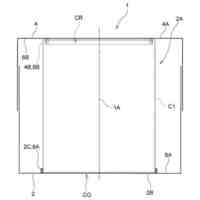
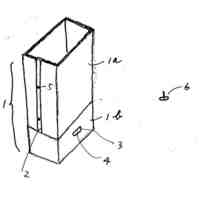
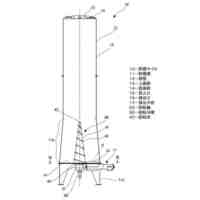
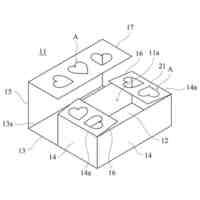
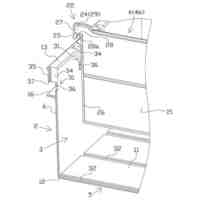
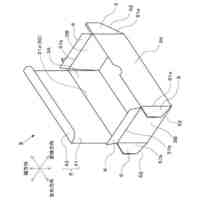
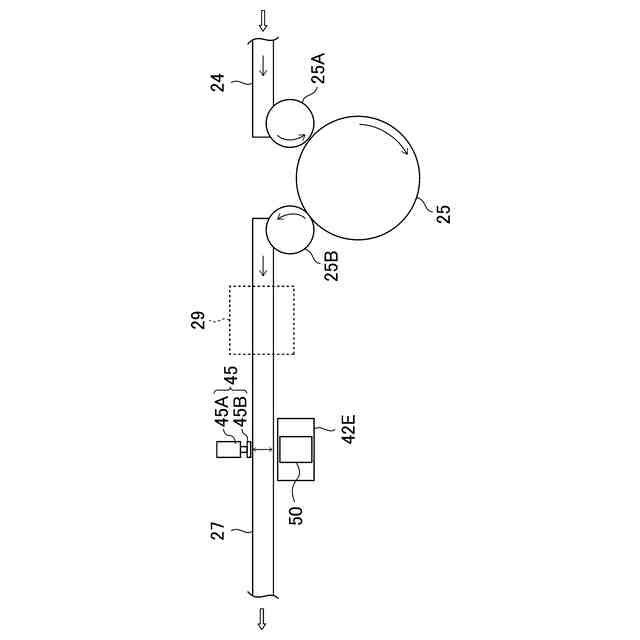
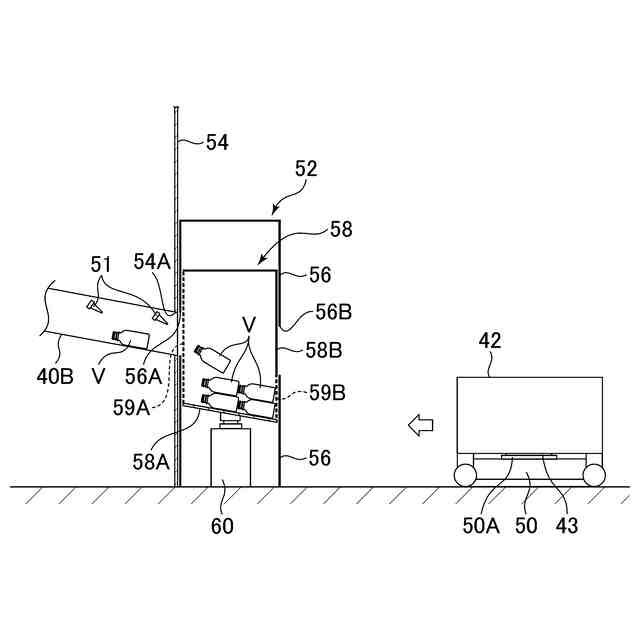
第1実施形態の貯留部の構成を示す縦断面図である。
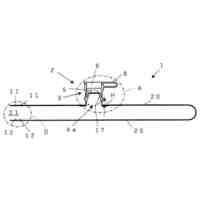
収容体が昇降機により収容位置まで下降された第1実施形態の貯留部の構成を示す縦断面図である。
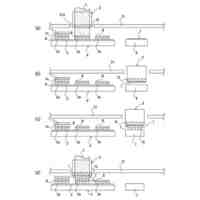
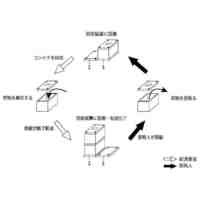
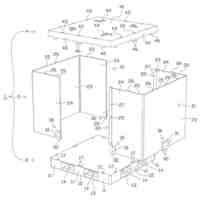
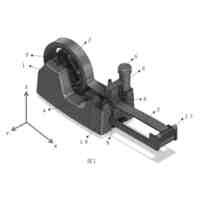
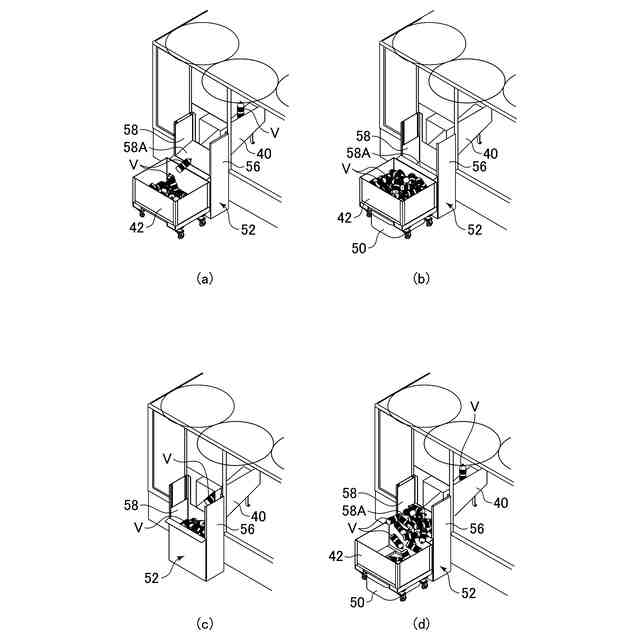
第1実施形態の容器処理システムにおける自動搬送機を用いた回収箱の交換処理の様子を時系列に示す斜視図である。
【発明を実施するための形態】
【0010】
以下、本発明の実施の形態を、図面を参照して説明する。図1は、本発明の第1実施形態である容器処理システムの上流側の配置を示す平面図であり、図2は図1の下流側の配置を示す平面図である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
澁谷工業株式会社
容器処理システム
18日前
澁谷工業株式会社
ボンディング装置およびボンディング方法
14日前
個人
箱
5か月前
個人
ゴミ箱
5か月前
個人
包装体
6か月前
個人
収納用具
9か月前
個人
容器
2か月前
個人
段ボール箱
1日前
個人
ゴミ収集器
3日前
個人
物品収納具
9か月前
個人
段ボール箱
11日前
個人
折り畳み水槽
6か月前
個人
パウチ補助具
5か月前
個人
宅配システム
3日前
個人
土嚢運搬器具
1か月前
個人
閉塞装置
3か月前
個人
ダンボール宝箱
6か月前
個人
掃除楽々ゴミ箱
10か月前
個人
コード類収納具
1か月前
個人
ゴミ処理機
2か月前
個人
貯蔵サイロ
7日前
個人
圧縮収納袋
6か月前
株式会社和気
包装用箱
2か月前
個人
粘着テープ剥がし具
11か月前
株式会社新弘
容器
5か月前
積水樹脂株式会社
接着剤
5か月前
個人
粘着テープ剥がし具
7か月前
株式会社新弘
容器
5か月前
株式会社イシダ
包装装置
5か月前
個人
包装箱
3か月前
三甲株式会社
蓋体
2か月前
株式会社イシダ
箱詰装置
8か月前
三甲株式会社
容器
8か月前
個人
塗料容器用蓋
6か月前
個人
粘着テープ切断装置
8か月前
積水樹脂株式会社
接着剤
10か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ