TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025037150
公報種別
公開特許公報(A)
公開日
2025-03-17
出願番号
2023143938
出願日
2023-09-05
発明の名称
物品追跡制御装置、物品追跡制御方法、および物品追跡制御プログラム
出願人
株式会社東芝
,
東芝インフラシステムズ株式会社
代理人
弁理士法人鈴榮特許綜合事務所
主分類
B65G
43/08 20060101AFI20250310BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】搬送装置による物品の搬送の際、物品の順序のずれることに起因するオーダのずれを解消する。
【解決手段】実施形態に係る物品追跡制御装置は、オーダリストに基づいてピックされた物品の物品IDを含むピッキング情報を取得し、物品が搬送装置を移動している撮影画像を取得する取得部と、撮影画像から物品を検知し、物品を検知し続けることにより追従し、追従している物品の状態をピッキング情報および撮影画像のうちの少なくとも1つから把握する物品追従制御部と、把握した物品の状態に応じた情報を出力する出力制御部と、を備える。
【選択図】 図1
特許請求の範囲
【請求項1】
オーダリストに基づいてピックされた物品の物品IDを含むピッキング情報を取得し、前記物品が搬送装置を移動している撮影画像を取得する取得部と、
前記撮影画像から物品を検知し、前記物品を検知し続けることにより追従し、前記追従している物品の状態を前記ピッキング情報および撮影画像のうちの少なくとも1つから把握する物品追従制御部と、
前記把握した物品の状態に応じた情報を出力する出力制御部と、
を備える、物品追跡制御装置。
続きを表示(約 1,000 文字)
【請求項2】
出力制御部は、前記把握した物品の状態に応じた情報を含む1次元コードまたは2次元コードをディスプレイに表示させる、
請求項1に記載の物品追跡制御装置。
【請求項3】
前記ピッキング情報および撮影画像のうちの少なくとも1つに基づいて検知された物品が誤ピックした物品であるかどうかを判定する判定部をさらに備え、
前記物品追従制御部は、前記物品が誤ピックであると判定した場合、前記ピッキング情報および撮影画像に基づいて、前記搬送装置を移動している物品の順番を更新する、
請求項1に記載の物品追跡制御装置。
【請求項4】
前記撮影画像に基づいて前記追従している物品が前記搬送装置から落下したかどうかを判定する判定部をさらに備え、
前記物品追従制御部は、落下したと判定した場合、前記ピッキング情報および撮影画像に基づいて、前記搬送装置を移動している物品の順番を更新する、
請求項1に記載の物品追跡制御装置。
【請求項5】
前記判定部は、前記追従している物品が一定時間検知できない場合に前記物品が前記搬送装置から落下したと判定する、
請求項4に記載の物品追跡制御装置。
【請求項6】
前記ピッキング情報および撮影画像に基づいて前記物品が破損しているかどうかを判定する判定部をさらに備える、
請求項1に記載の物品追跡制御装置。
【請求項7】
前記判定部は、サンプルデータを用いて学習した学習モデルを用いて前記物品が破損しているかどうかを判定する、
請求項6に記載の物品追跡制御装置。
【請求項8】
前記判定部は、前記撮影画像とサンプルデータを比較することにより、前記物品が破損しているかどうかを判定する、
請求項6に記載の物品追跡制御装置。
【請求項9】
前記物品追従制御部は、前記物品が破損したと判定した場合、前記搬送装置を移動している物品の順番を更新する、
請求項6に記載の物品追跡制御装置。
【請求項10】
前記出力制御部は、前記物品が破損したと判定した場合、前記破損した物品をソータがリジェクトボックスに送るための表示を出力する、
請求項6に記載の物品追跡制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、物品追跡制御装置、物品追跡制御方法、および物品追跡制御プログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
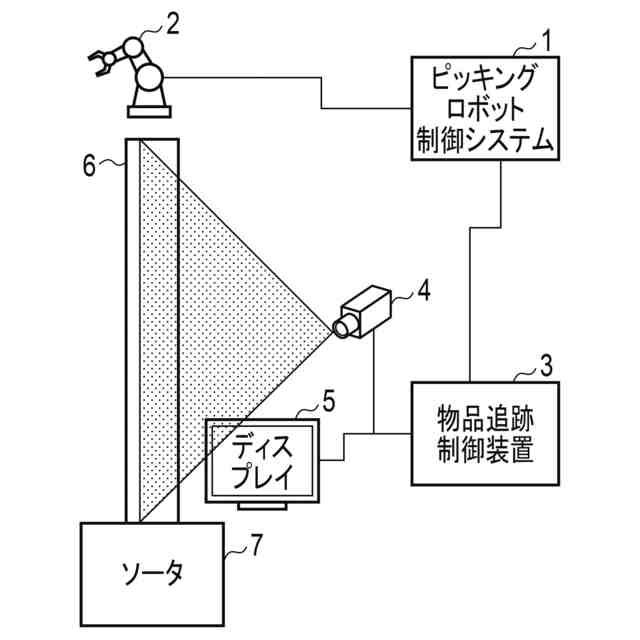
近年、物流倉庫等で、デジタルトランスフォーメーション化(DX(Digital Transformation)化)が進んでいる。そのため、物流においても様々なロボットが連携して作業の自動化が行われている。例えば、トータルピッキングでは、ロボットでピックした物品を、搬送装置(ベルトコンベアまたはロボット)を介して後段の仕分け装置(ソータ)に搬送される。そして、仕分け装置は、オーダ通りに仕分けを実施する。仕分け装置は、仕分けを行う物品のバーコードをスキャンして仕分け作業を行う。
【0003】
そのため、仕分け装置が物品を仕分ける際、物品のバーコードを特定の方向を向かせて搬送する必要がある。しかしながら、ピッキングロボットがこのように一定の向きにピックすることは困難である、或いは一定の向きにピックさせるように制限することにより、ピッキングロボットが所望する性能が出せない。また、別の方法として前段のシステムから後段の仕分け装置に対して情報を送る方法もある。しかしながら、連携する装置間でAPI(Application Programming Interface)が異なった場合、システム変更を行うことは困難である。
【0004】
また、特許文献1では、搬送装置の物品を検知し、順番分けを行う搬送システムについての技術が開示されている。
【先行技術文献】
【特許文献】
【0005】
特許第6990408号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
搬送装置での物品を搬送する際、物品の滞留、落下、または破損により物品の順番がずれる事象が起きる。これらの事象が生じると、仕分け装置で必要としている物品がこない、仕分け終わらない、またはオーダのずれ等が発生するという問題がある。例えば、仕分け装置に物品を入れるためにバーコードを読み取る際、オーダがずれた状態でバーコード読み取り処理を行ってしまうと、所望していない別の物品が仕分けられてしまうという問題がある。
【0007】
さらに、仕分け装置は、物品の破損状況等を検知することができないという問題もある。
【0008】
この発明は、上記事情に着目してなされたもので、その目的とするところは、搬送装置による物品の搬送の際、物品の順序のずれることに起因するオーダのずれを解消することができる技術を提供することにある。さらに、その目的とするところは、搬送装置による物品の搬送の際、物品が破損したことを検知し、仕分け装置に物品が破損したことを知らせる技術を提供することにある。
【課題を解決するための手段】
【0009】
実施形態に係る物品追跡制御装置は、オーダリストに基づいてピックされた物品の物品IDを含むピッキング情報を取得し、前記物品が搬送装置を移動している撮影画像を取得する取得部と、前記撮影画像から物品を検知し、前記物品を検知し続けることにより追従し、前記追従している物品の状態を前記ピッキング情報および撮影画像のうちの少なくとも1つから把握する物品追従制御部と、前記把握した物品の状態に応じた情報を出力する出力制御部と、を備えるものである。
【図面の簡単な説明】
【0010】
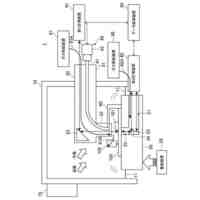
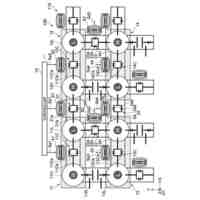
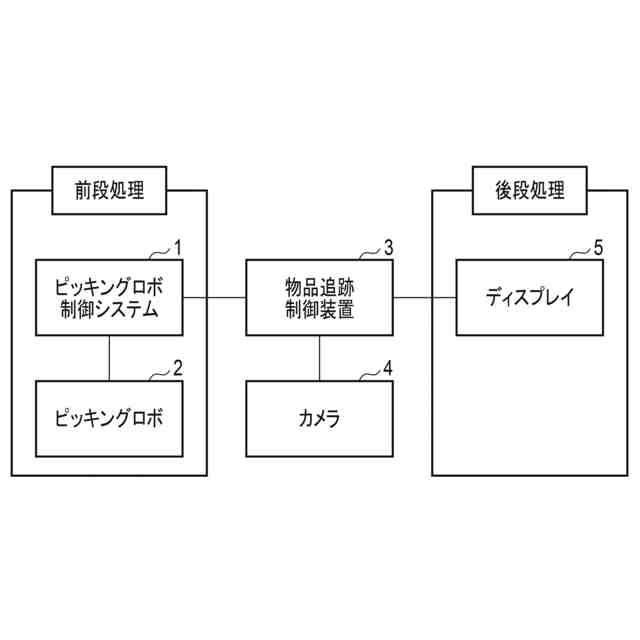
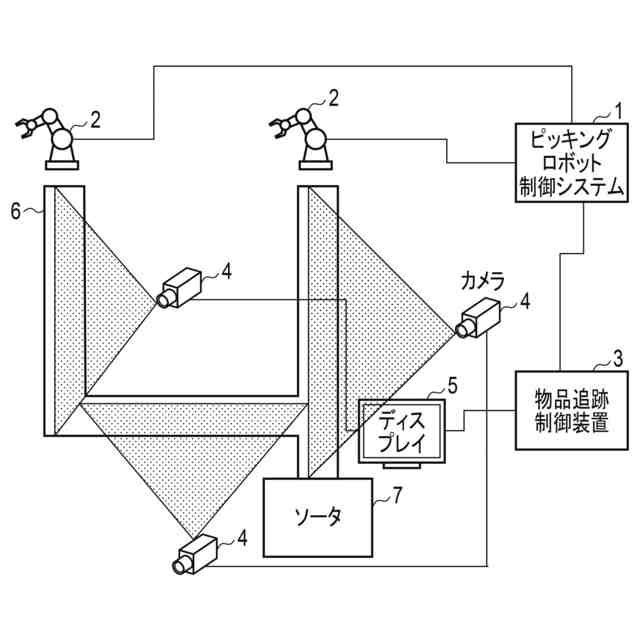
図1は、第1の実施形態に係る物品搬送システムにおける装置の配置例を示した概念図である。
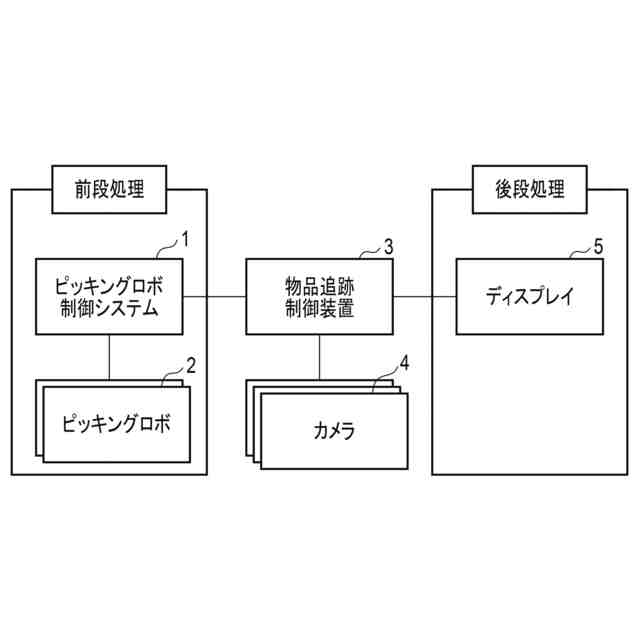
図2は、第1の実施形態に係る物品搬送システムにおけるブロック図を示した図である。
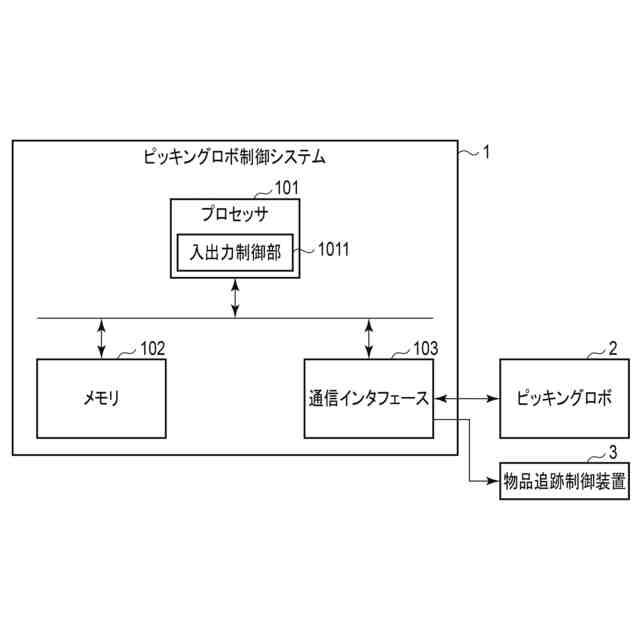
図3は、実施形態に係るピッキングロボット制御システムの構成例を示すブロック図である。
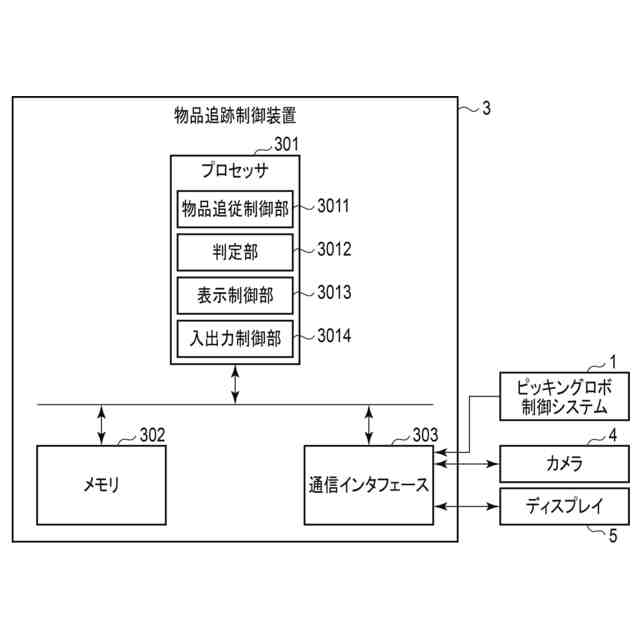
図4は、実施形態に係る物品追跡制御装置の構成例を示すブロック図である。
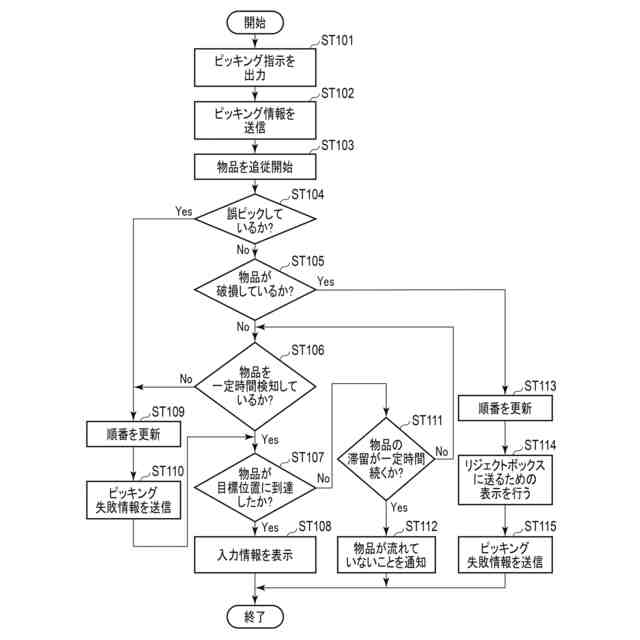
図5は、実施形態に係るピッキングロボット制御システムおよび物品追跡制御装置における物品追跡動作例を説明するためのフローチャートである。
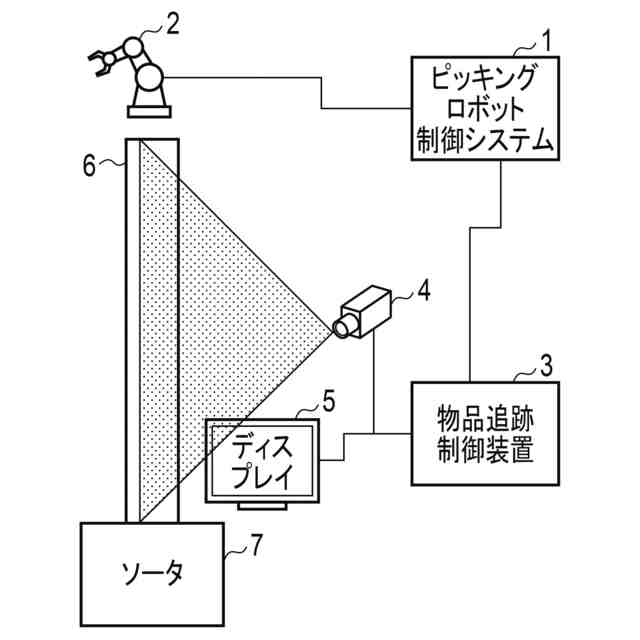
図6は、第2の実施形態に係る物品搬送システムにおける装置の配置例を示した概念図である。
図7は、第2の実施形態に係る物品搬送システムにおけるブロック図を示した図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
センサ
25日前
株式会社東芝
発券機
1日前
株式会社東芝
センサ
11日前
株式会社東芝
遮断装置
25日前
株式会社東芝
計算装置
1か月前
株式会社東芝
電子装置
25日前
株式会社東芝
計測装置
19日前
株式会社東芝
電子機器
18日前
株式会社東芝
電子機器
18日前
株式会社東芝
計算装置
6日前
株式会社東芝
電源回路
1か月前
株式会社東芝
回転電機
11日前
株式会社東芝
試験装置
今日
株式会社東芝
計算装置
6日前
株式会社東芝
半導体装置
11日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
11日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
穴検出装置
19日前
株式会社東芝
半導体装置
6日前
株式会社東芝
半導体装置
25日前
株式会社東芝
半導体装置
25日前
株式会社東芝
半導体装置
15日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
26日前
株式会社東芝
蓄電池装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
水処理装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
ガス遮断器
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
26日前
株式会社東芝
半導体装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ