TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025037141
公報種別
公開特許公報(A)
公開日
2025-03-17
出願番号
2023143922
出願日
2023-09-05
発明の名称
学習装置、方法およびプログラム
出願人
株式会社東芝
代理人
弁理士法人鈴榮特許綜合事務所
主分類
G06N
20/00 20190101AFI20250310BHJP(計算;計数)
要約
【課題】目標とするクラスタ数の分類に好適なモデルを学習すること。
【解決手段】一実施形態に係る学習装置は、取得部と、学習部と、特徴クラスタ数推定部と、学習条件更新部とを備える。取得部は、複数の対象データと目標クラスタ数とを取得する。学習部は、学習条件のもと、複数の対象データを教師なし学習することによって学習モデルを反復学習する。特徴クラスタ数推定部は、複数の学習データに対応する複数の特徴ベクトルに基づいて特徴クラスタ数を推定する。学習条件更新部は、特徴クラスタ数と目標クラスタ数とに基づいて学習条件を更新する。
【選択図】図1
特許請求の範囲
【請求項1】
複数の対象データと目標クラスタ数とを取得する取得部と、
学習条件に基づいて前記複数の対象データを教師なし学習することによって学習モデルを反復学習する学習部と、
前記複数の対象データに対応する複数の特徴ベクトルに基づいて特徴クラスタ数を推定する特徴クラスタ数推定部と、
前記特徴クラスタ数と前記目標クラスタ数とに基づいて前記学習条件を更新する学習条件更新部と
を具備する、学習装置。
続きを表示(約 1,700 文字)
【請求項2】
前記学習部は、前記学習モデルに対して前記複数の対象データを入力することにより前記複数の特徴ベクトルを出力する、
請求項1に記載の学習装置。
【請求項3】
前記学習部は、前記複数の対象データのうちの異なる対象データから得られた第1の特徴ベクトルと第2の特徴ベクトルとの誤差が大きいほど損失が小さくなる第1の手法を用いて第1損失を計算し、
前記第1の手法は、前記誤差の感度を制御する第1温度パラメータを有し、
前記学習条件更新部は、前記第1温度パラメータを変更することによって前記学習条件を更新する、
請求項2に記載の学習装置。
【請求項4】
前記学習条件更新部は、
前記特徴クラスタ数が前記目標クラスタ数よりも小さい場合、前記第1温度パラメータを大きくするように前記学習条件を更新し、
前記特徴クラスタ数が前記目標クラスタ数よりも大きい場合、前記第1温度パラメータを小さくするように前記学習条件を更新する、
請求項3に記載の学習装置。
【請求項5】
前記学習部は、特徴ベクトルの要素同士の相関が低いほど損失が小さくなる第2の手法を用いて第2損失を計算し、
前記第2の手法は、前記相関の感度を制御する第2温度パラメータを有し、
前記学習条件更新部は、前記第2温度パラメータを変更することによって前記学習条件を更新する、
請求項2に記載の学習装置。
【請求項6】
前記学習条件更新部は、
前記特徴クラスタ数が前記目標クラスタ数よりも小さい場合、前記第2温度パラメータを大きくするように前記学習条件を更新し、
前記特徴クラスタ数が前記目標クラスタ数よりも大きい場合、前記第2温度パラメータを小さくするように前記学習条件を更新する、
請求項5に記載の学習装置。
【請求項7】
前記学習部は、
前記複数の対象データのうちの異なる対象データから得られた第1の特徴ベクトルと第2の特徴ベクトルとの誤差が大きいほど損失が小さくなる第1の手法を用いて第1損失を計算し、
前記第1の手法は、前記誤差の感度を制御する第1温度パラメータを有し、
特徴ベクトルの要素同士の相関が低いほど損失が小さくなる第2の手法を用いて第2損失を計算し、
前記第2の手法は、前記相関の感度を制御する第2温度パラメータを有し、
前記学習条件更新部は、前記第1温度パラメータ、前記第2温度パラメータ、および前記第1損失と前記第2損失との影響度を調整するバランシングパラメータのうちの少なくとも一つを変更することによって前記学習条件を更新する、
請求項2に記載の学習装置。
【請求項8】
前記学習条件更新部は、
前記特徴クラスタ数が前記目標クラスタ数よりも小さい場合、前記第1温度パラメータ、前記第2温度パラメータ、および前記バランシングパラメータのうちの少なくとも一つを大きくするように前記学習条件を更新し、
前記特徴クラスタ数が前記目標クラスタ数よりも大きい場合、前記第1温度パラメータ、前記第2温度パラメータ、および前記バランシングパラメータのうちの少なくとも一つを小さくするように前記学習条件を更新する、
請求項7に記載の学習装置。
【請求項9】
前記学習条件更新部は、
前記特徴クラスタ数が所定の条件を満たすか否かを判定し、
前記所定の条件を満たすと判定した場合、前記学習モデルの反復学習を終了させ、
前記所定の条件を満たさないと判定した場合、前記学習条件を変更する、
請求項1に記載の学習装置。
【請求項10】
前記所定の条件は、前記特徴クラスタ数と前記目標クラスタ数との差が所定の値以下、或いは前記特徴クラスタ数が前記目標クラスタ数の下限値以上且つ前記目標クラスタ数の上限値以下である、
請求項9に記載の学習装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、学習装置、方法およびプログラムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、機械学習の学習手法において、正解データとしての分類ラベルを与えずに対象データを学習する教師なし学習が知られている。教師なし学習では、分類ラベルが未知であることから、対象データの特徴が反映されたクラスタ数に分類されることがある。また、教師なし学習では、学習条件によって異なるクラスタ数に分類されることがある。これらのことから、教師なし学習の学習結果は、ユーザが想定し得ないクラスタ数になることがあり、必ずしもユーザにとって好適なものではない可能性がある。
【0003】
上記事情により、教師なし学習において、目標とするクラスタ数に分類したいという需要が考えられる。例えば、検査画像の分類において、不良パターンが10クラス程度と、分類されるカテゴリ数のおおよその目安が判っている場合がある。また例えば、10種類の物体(乗り物および動物など)の画像データセットであるCIFAR-10において、乗り物と動物との2クラスに分類したい場合や、色およびサイズなども考慮して通常の10クラスよりもさらに細かい100クラスに分類したい場合がある。しかしながら、このような場合において、目標とするクラスタ数の分類に好適なモデルを学習することができる学習装置はこれまで知られていない。
【先行技術文献】
【特許文献】
【0004】
特開2019-139651号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明が解決しようとする課題は、目標とするクラスタ数の分類に好適なモデルを学習することができる学習装置、方法およびプログラムを提供することである。
【課題を解決するための手段】
【0006】
一実施形態に係る学習装置は、取得部と、学習部と、特徴クラスタ数推定部と、学習条件更新部とを備える。取得部は、複数の対象データと目標クラスタ数とを取得する。学習部は、学習条件のもと、複数の対象データを教師なし学習することによって学習モデルを反復学習する。特徴クラスタ数推定部は、複数の学習データに対応する複数の特徴ベクトルに基づいて特徴クラスタ数を推定する。学習条件更新部は、特徴クラスタ数と目標クラスタ数とに基づいて学習条件を更新する。
【図面の簡単な説明】
【0007】
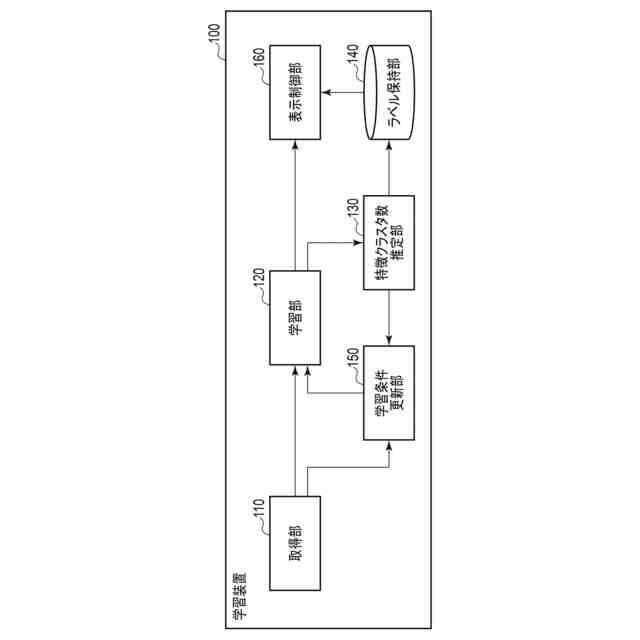
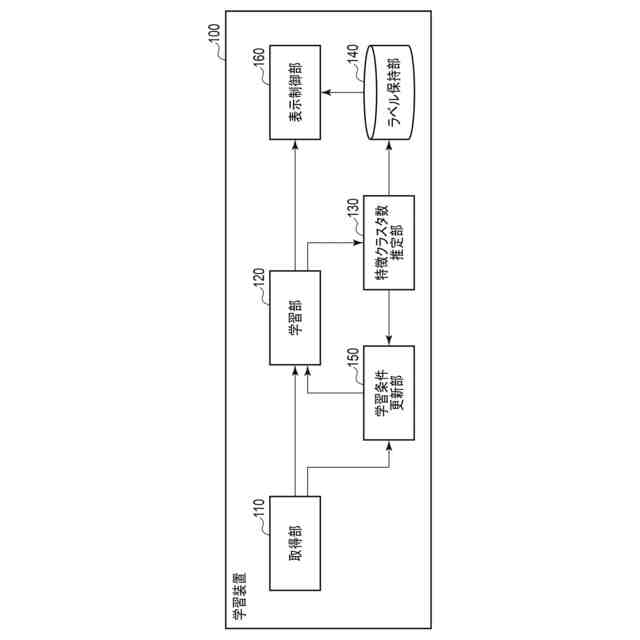
実施形態に係る学習装置の構成を例示するブロック図。
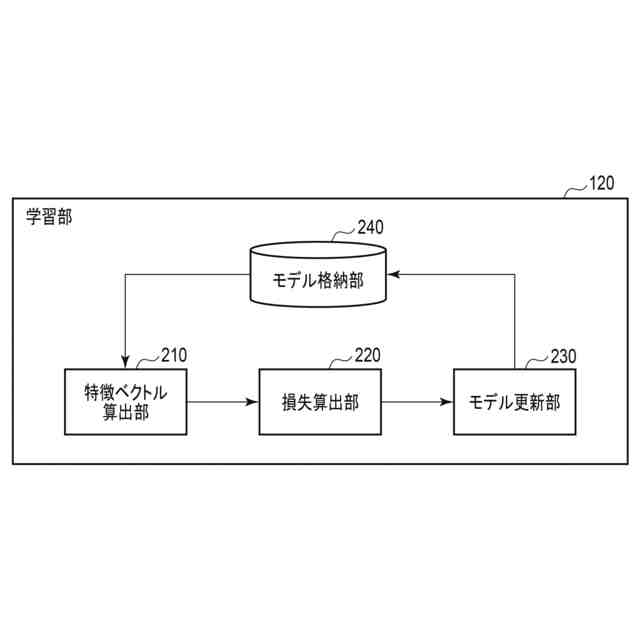
図1の学習部の具体的な構成を例示するブロック図。
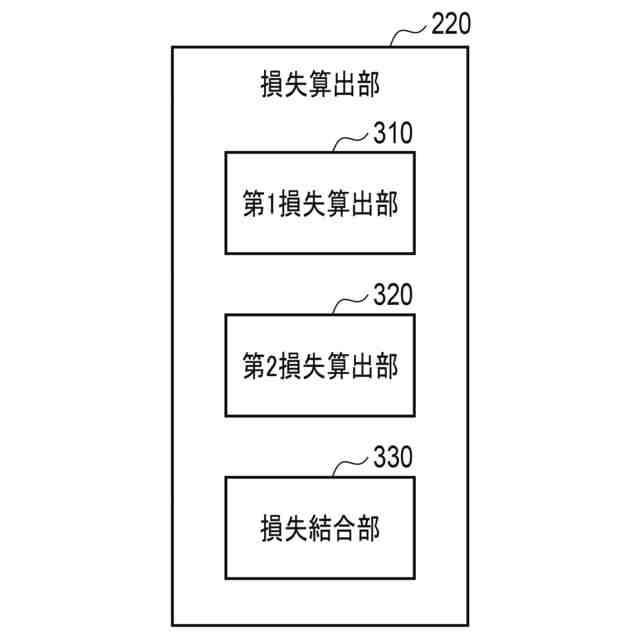
図2の損失算出部の具体的な構成を例示するブロック図。
実施形態に係る学習装置の動作を例示するフローチャート。
実施形態における第1温度パラメータを変更した場合の特徴ベクトルを可視化した散布図。
実施形態における第2温度パラメータを変更した場合の特徴ベクトルを可視化した散布図。
実施形態におけるバランシングパラメータを変更した場合の特徴ベクトルを可視化した散布図。
実施形態における特徴ベクトルを可視化した散布図とクラスタ毎の代表画像群とを含む表示データの例。
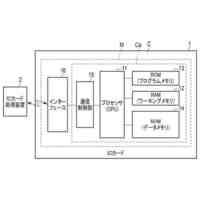
一実施形態に係るコンピュータのハードウェア構成を例示するブロック図。
【発明を実施するための形態】
【0008】
以下、図面を参照しながら、学習装置の実施形態について詳細に説明する。実施形態では、乗り物および動物など複数の種類の被写体それぞれを含む画像データ群(データセット)を、教師なし学習によってクラスタリングする機械学習の学習モデルを例に説明する。また、機械学習として、例えば、ニューラルネットワークを利用するものとする。即ち、実施形態の学習モデルは、ニューラルネットワークモデルである。
【0009】
(実施形態)
図1は、実施形態に係る学習装置100の構成を例示するブロック図である。学習装置100は、機械学習の学習モデルを教師なし学習することによって学習済みモデルを生成するためのコンピュータである。学習装置100は、取得部110と、学習部120と、特徴クラスタ数推定部130と、ラベル保持部140と、学習条件更新部150と、表示制御部160とを備える。
【0010】
取得部110は、複数の対象データ、目標クラスタ数、および学習条件を取得する。取得部110は、複数の対象データおよび学習条件を学習部120へと出力し、目標クラスタ数および学習条件を学習条件更新部150へと出力する。尚、取得部110が取得する学習条件は、初期学習条件と呼ばれてもよい。また、初期学習条件は、予め学習装置100に設定されていてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
センサ
25日前
株式会社東芝
センサ
11日前
株式会社東芝
発券機
1日前
株式会社東芝
遮断装置
25日前
株式会社東芝
回転電機
11日前
株式会社東芝
電子機器
18日前
株式会社東芝
電子機器
18日前
株式会社東芝
計測装置
19日前
株式会社東芝
電子装置
25日前
株式会社東芝
計算装置
6日前
株式会社東芝
計算装置
6日前
株式会社東芝
試験装置
今日
株式会社東芝
計算装置
1か月前
株式会社東芝
ICカード
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
ガス遮断器
1か月前
株式会社東芝
半導体装置
6日前
株式会社東芝
蓄電池装置
1か月前
株式会社東芝
半導体装置
11日前
株式会社東芝
半導体装置
11日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
15日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
29日前
株式会社東芝
穴検出装置
19日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
25日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
26日前
株式会社東芝
半導体装置
26日前
株式会社東芝
半導体装置
26日前
株式会社東芝
半導体装置
25日前
株式会社東芝
半導体装置
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ