TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025036645
公報種別
公開特許公報(A)
公開日
2025-03-14
出願番号
2024230625,2020196939
出願日
2024-12-26,2020-11-27
発明の名称
情報処理装置、制御方法、プログラム及び記憶媒体
出願人
パイオニア株式会社
,
パイオニアスマートセンシングイノベーションズ株式会社
代理人
個人
主分類
G01S
17/86 20200101AFI20250306BHJP(測定;試験)
要約
【課題】自己位置推定を好適に実行することが可能な情報処理装置を提供する。
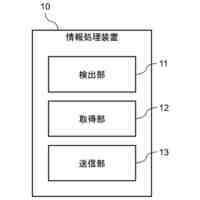
【解決手段】情報処理装置1のコントローラ13は、対象移動体を第1位置算出方法であるGNSSによる測位位置を取得する。そして、コントローラ13は、GNSSによる測位位置に基づきイニシャル位置探索範囲Riを設定し、当該イニシャル位置探索範囲Ri内において第2位置算出方法であるNDTスキャンマッチングの基準位置を設定する。そして、コントローラ13は、設定した基準位置に基づき、NDTスキャンマッチングによる対象移動体の位置推定を行う。この場合、コントローラ13は、GNSSの測位位置の測位の精度を表す精度情報に基づいて、イニシャル位置探索範囲Riのサイズを決定する。
【選択図】図15
特許請求の範囲
【請求項1】
第1位置算出方法による移動体の測位位置を取得する位置取得手段と、
前記測位位置に基づき第2位置算出方法の基準位置を探索する探索範囲を設定し、当該探索範囲内において、単位領域であるボクセルごとの物体の位置を表すボクセルデータと、前記移動体に設けられた計測装置の出力に基づく点群データとを、前記基準位置に基づき照合した場合に、前記点群データに含まれる計測点のうち前記ボクセルデータと対応付けられた計測点の比率に基づき前記基準位置を設定する基準位置設定手段と、
前記基準位置に基づき、前記第2位置算出方法による前記移動体の位置推定を行う位置推定手段と、を有し、
前記基準位置設定手段は、前記測位位置の測位の精度を表す精度情報に基づいて、前記探索範囲のサイズを決定する、
情報処理装置。
続きを表示(約 1,700 文字)
【請求項2】
前記第1位置算出方法は、GNSSによる測位であり、
前記基準位置設定手段は、前記GNSSの精度情報に基づいて、前記探索範囲のサイズを決定する、請求項1に記載の情報処理装置。
【請求項3】
前記基準位置設定手段は、前記精度情報が示す精度が高いほど、前記探索範囲のサイズを小さくする、請求項1または2に記載の情報処理装置。
【請求項4】
前記位置推定手段は、直前の処理時刻において決定された前記移動体の推定位置が存在しない場合、前記基準位置に基づき前記点群データの座標系を前記ボクセルデータの座標系に変換する、請求項1~3のいずれか一項に記載の情報処理装置。
【請求項5】
前記移動体は車両であり、
前記基準位置設定手段は、前記探索範囲内に存在するボクセルごとの高さ方向の位置の度数分布に基づき、前記車両が存在する候補ボクセルを決定する、請求項1~4のいずれか一項に記載の情報処理装置。
【請求項6】
前記移動体は船舶であり、
前記基準位置設定手段は、前記探索範囲内にボクセルデータが存在しない仮想のボクセルを、前記船舶が存在する候補ボクセルとして決定する、請求項1~4のいずれか一項に記載の情報処理装置。
【請求項7】
直前の処理時刻において決定された前記移動体の推定位置が存在し、かつ、前記直前の処理時刻での前記第2位置算出方法の評価指標が所定値未満である場合、
前記基準位置設定手段は、前記基準位置を決定し、
前記位置推定手段は、当該基準位置に基づき、現在の処理時刻の前記点群データの座標系を前記ボクセルデータの座標系に変換する、請求項1~6のいずれか一項に記載の情報処理装置。
【請求項8】
前記位置推定手段は、直前の処理時刻において決定された前記移動体の推定位置が存在し、かつ、前記評価指標が前記所定値以上である場合、当該推定位置に基づき、現在の処理時刻の前記点群データの座標系を前記ボクセルデータの座標系に変換する、請求項7に記載の情報処理装置。
【請求項9】
コンピュータが実行する制御方法であって、
第1位置算出方法による移動体の測位位置を取得する位置取得工程と、
前記測位位置に基づき第2位置算出方法の基準位置を探索する探索範囲を設定し、当該探索範囲内において、単位領域であるボクセルごとの物体の位置を表すボクセルデータと、前記移動体に設けられた計測装置の出力に基づく点群データとを、前記基準位置に基づき照合した場合に、前記点群データに含まれる計測点のうち前記ボクセルデータと対応付けられた計測点の比率に基づき前記基準位置を設定する基準位置設定工程と、
前記基準位置に基づき、前記第2位置算出方法による前記移動体の位置推定を行う位置推定工程と、を有し、
前記基準位置設定工程は、前記測位位置の測位の精度を表す精度情報に基づいて、前記探索範囲のサイズを決定する、制御方法。
【請求項10】
第1位置算出方法による移動体の測位位置を取得する位置取得手段と、
前記測位位置に基づき第2位置算出方法の基準位置を探索する探索範囲を設定し、当該探索範囲内において、単位領域であるボクセルごとの物体の位置を表すボクセルデータと、前記移動体に設けられた計測装置の出力に基づく点群データとを、前記基準位置に基づき照合した場合に、前記点群データに含まれる計測点のうち前記ボクセルデータと対応付けられた計測点の比率に基づき前記基準位置を設定する基準位置設定手段と、
前記基準位置に基づき、前記第2位置算出方法による前記移動体の位置推定を行う位置推定手段
としてコンピュータを機能させ、
前記基準位置設定手段は、前記測位位置の測位の精度を表す精度情報に基づいて、前記探索範囲のサイズを決定する、プログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、位置推定に関する。
続きを表示(約 3,200 文字)
【背景技術】
【0002】
従来から、レーザスキャナなどの計測装置を用いて計測した周辺物体の形状データを、予め周辺物体の形状が記憶された地図情報と照合(マッチング)することで、車両の自己位置を推定する技術が知られている。例えば、特許文献1には、空間を所定の規則で分割したボクセル中における検出物が静止物か移動物かを判定し、静止物が存在するボクセルを対象として地図情報と計測データとのマッチングを行う自律移動システムが開示されている。また、特許文献2には、ボクセル毎の静止物体の平均ベクトルと共分散行列とを含むボクセルデータとライダが出力する点群データとの照合により自己位置推定を行うスキャンマッチング手法が開示されている。
【先行技術文献】
【特許文献】
【0003】
国際公開WO2013/076829
国際公開WO2018/221453
【発明の概要】
【発明が解決しようとする課題】
【0004】
昨今、自動車分野だけでなく、船舶においても、自動操船システム検討が進められており、安全な自動操船には精度の良い自己位置推定は同様に重要である。外洋では周辺に構造物が少ないためGNSS(Global Navigation Satellite System)により自己位置を測位可能であるが、都市部の沿岸や河川では高層ビル等が隣接するため、受信衛星数の低下やマルチパスなどによりGNSS電波の受信環境は悪く、精度の良い測位はできないことが多い。よって、船舶の場合においても、上記のスキャンマッチングによる高精度な位置推定が好適に適用される。
【0005】
一方、自己位置推定処理の開始時は、自動車も船舶も、GNSSによる測位位置をイニシャル位置としている。GNSSによる測位には誤差が伴うが、その誤差が大きくなければ,上記のスキャンマッチングのためのイニシャル位置として使用することができ,結果として高精度な位置推定が可能である。しかし、GNSS受信環境が悪い場合は,大きく離れた場所をイニシャル位置としてしまい、スキャンマッチングにおいて適切に最適解が求められない状況もあり得る。よって、このような場合において適切に位置推定を行うには、確からしいイニシャル位置を探索する必要がある。また,何らかの原因で推定自己位置が大きくずれた場合においても、確からしいイニシャル位置を同様に設定する必要がある。
【0006】
本開示は、上記のような課題を解決するためになされたものであり、自己位置推定を好適に実行することが可能な情報処理装置を提供することを主な目的とする。
【課題を解決するための手段】
【0007】
請求項に記載の発明は、
第1位置算出方法による移動体の測位位置を取得する位置取得手段と、
前記測位位置に基づき第2位置算出方法の基準位置を探索する探索範囲を設定し、当該探索範囲内において、単位領域であるボクセルごとの物体の位置を表すボクセルデータと、前記移動体に設けられた計測装置の出力に基づく点群データとを、前記基準位置に基づき照合した場合に、前記点群データに含まれる計測点のうち前記ボクセルデータと対応付けられた計測点の比率に基づき前記基準位置を設定する基準位置設定手段と、
前記基準位置に基づき、前記第2位置算出方法による前記移動体の位置推定を行う位置推定手段と、を有し、
前記基準位置設定手段は、前記測位位置の測位の精度を表す精度情報に基づいて、前記探索範囲のサイズを決定する、
情報処理装置である。
【0008】
また、請求項に記載の発明は、
コンピュータが実行する制御方法であって、
第1位置算出方法による移動体の測位位置を取得する位置取得工程と、
前記測位位置に基づき第2位置算出方法の基準位置を探索する探索範囲を設定し、当該探索範囲内において、単位領域であるボクセルごとの物体の位置を表すボクセルデータと、前記移動体に設けられた計測装置の出力に基づく点群データとを、前記基準位置に基づき照合した場合に、前記点群データに含まれる計測点のうち前記ボクセルデータと対応付けられた計測点の比率に基づき前記基準位置を設定する基準位置設定工程と、
前記基準位置に基づき、前記第2位置算出方法による前記移動体の位置推定を行う位置推定工程と、を有し、
前記基準位置設定工程は、前記測位位置の測位の精度を表す精度情報に基づいて、前記探索範囲のサイズを決定する、制御方法である。
【0009】
また、請求項に記載の発明は、
第1位置算出方法による移動体の測位位置を取得する位置取得手段と、
前記測位位置に基づき第2位置算出方法の基準位置を探索する探索範囲を設定し、当該探索範囲内において、単位領域であるボクセルごとの物体の位置を表すボクセルデータと、前記移動体に設けられた計測装置の出力に基づく点群データとを、前記基準位置に基づき照合した場合に、前記点群データに含まれる計測点のうち前記ボクセルデータと対応付けられた計測点の比率に基づき前記基準位置を設定する基準位置設定手段と、
前記基準位置に基づき、前記第2位置算出方法による前記移動体の位置推定を行う位置推定手段
としてコンピュータを機能させ、
前記基準位置設定手段は、前記測位位置の測位の精度を表す精度情報に基づいて、前記探索範囲のサイズを決定する、プログラムである。
【図面の簡単な説明】
【0010】
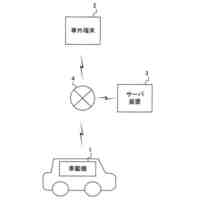
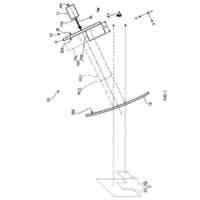
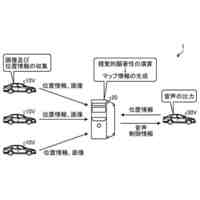
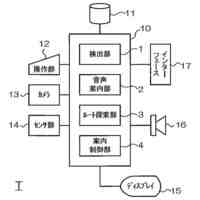
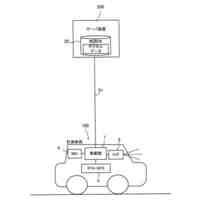
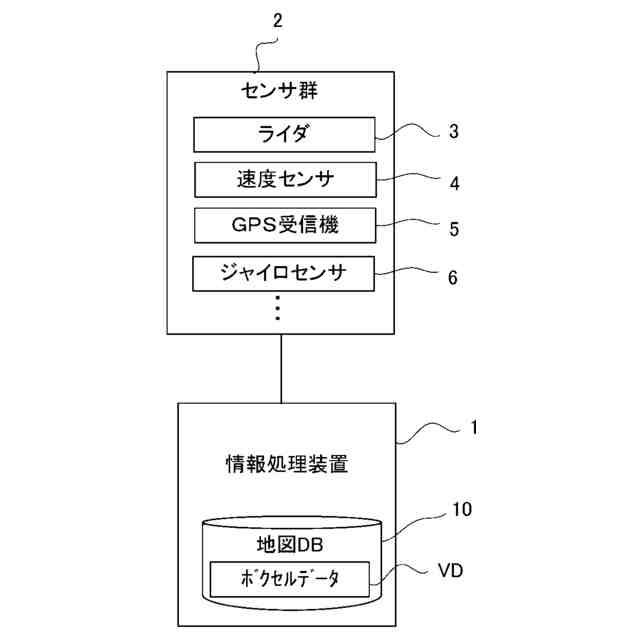
運転支援システムの概略構成図である。
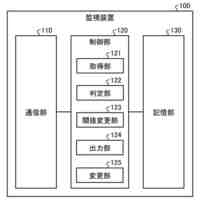
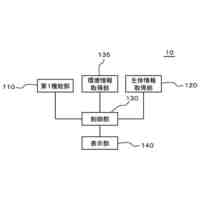
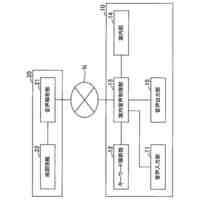
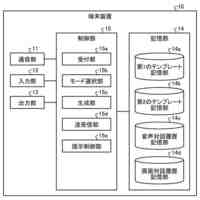
車載機の機能的構成を示すブロック図である。
自己位置推定部が推定すべき自己位置を2次元直交座標で表した図である。
ボクセルデータの概略的なデータ構造の一例を示す。
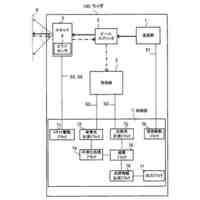
自己位置推定部の機能ブロックの一例である。
ワールド座標系における2次元平面上での、ボクセルデータが存在するボクセルとこれらのボクセル付近の位置を示す計測点との位置関係を示す。
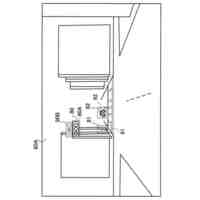
立体交差がある道路付近での車両の俯瞰図を示す。
GNSSの測位位置及びイニシャル位置探索範囲を明示した道路の俯瞰図を示す。
(A)イニシャル位置探索範囲内におけるボクセルを明示した図である。(B)イニシャル位置探索範囲内のボクセルデータが示すz座標値の度数分布を示す。
候補ボクセル及び候補ボクセルの順番を明示した俯瞰図を示す。
簡易NDT処理を行った場合の対応付け比率の遷移を示すグラフである。
仮想ボクセル及び仮想ボクセルの順番を明示した俯瞰図を示す。
簡易NDT処理を行った場合の対応付け比率の遷移を示すグラフである。
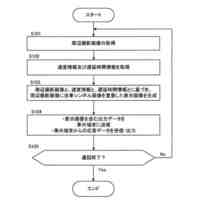
実施例に係る自己位置推定処理の概要を示すフローチャートの一例である。
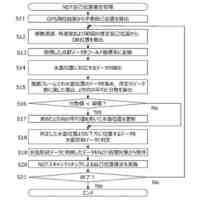
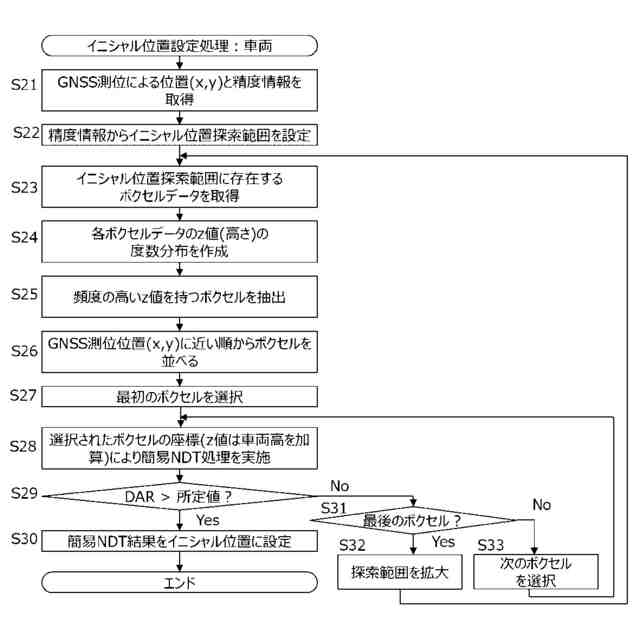
対象移動体が車両である場合の実施例に係るイニシャル位置設定処理の手順を示すフローチャートの一例である。
対象移動体が船舶である場合の実施例に係るイニシャル位置設定処理の手順を示すフローチャートの一例である。
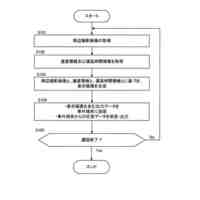
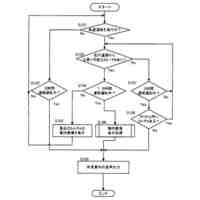
変形例に係る自己位置推定処理の概要を示すフローチャートの一例である。
対象移動体が車両である場合の変形例に係るイニシャル位置設定処理の手順を示すフローチャートの一例である。
対象移動体が船舶である場合の変形例に係るイニシャル位置設定処理の手順を示すフローチャートの一例である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
パイオニア株式会社
情報処理装置及び生成装置
18日前
パイオニア株式会社
監視装置、監視方法および監視プログラム
20日前
パイオニア株式会社
監視装置、監視方法および監視プログラム
25日前
パイオニア株式会社
情報処理装置、制御方法、プログラム及び記憶媒体
3日前
パイオニア株式会社
情報処理装置、制御方法、プログラム及び記憶媒体
3日前
パイオニア株式会社
情報処理装置、制御方法、プログラム及び記憶媒体
3日前
パイオニア株式会社
情報処理装置、制御方法、プログラム及び記憶媒体
3日前
パイオニア株式会社
車両
16日前
パイオニア株式会社
携帯機器
16日前
パイオニア株式会社
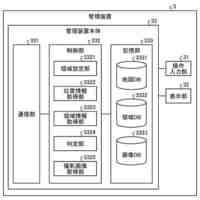
管理装置
1か月前
パイオニア株式会社
駆動装置
17日前
パイオニア株式会社
表示装置
17日前
パイオニア株式会社
発光装置
17日前
パイオニア株式会社
案内装置
16日前
パイオニア株式会社
情報処理装置、情報処理方法、および、情報処理プログラム
17日前
パイオニア株式会社
センサ装置
12日前
パイオニア株式会社
情報処理装置
16日前
パイオニア株式会社
車両制御装置
16日前
パイオニア株式会社
音声制御装置
3日前
パイオニア株式会社
情報提供装置
5日前
東北パイオニア株式会社
スピーカ装置
4日前
パイオニア株式会社
光偏向モジュール
1か月前
パイオニア株式会社
振動板、スピーカ装置
5日前
パイオニア株式会社
受信装置及び受信処理方法
3日前
パイオニア株式会社
波長選択素子及び波長選択素子の製造方法
16日前
パイオニア株式会社
案内装置、案内方法及び案内用プログラム
10日前
パイオニア株式会社
光制御装置、光制御方法、及び、プログラム
16日前
パイオニア株式会社
計測装置、制御方法、プログラム及び記憶媒体
10日前
パイオニア株式会社
制御装置、制御方法、プログラム及び記憶媒体
16日前
パイオニア株式会社
分光カメラ、撮像方法、プログラム及び記録媒体
1か月前
パイオニア株式会社
情報処理装置、制御方法、プログラム及び記憶媒体
1か月前
パイオニア株式会社
地図作成装置、制御方法、プログラム及び記憶媒体
10日前
パイオニア株式会社
情報処理装置、管理装置、端末装置及び情報処理方法
16日前
パイオニア株式会社
情報提供装置、制御方法、プログラム、及び記憶媒体
10日前
パイオニア株式会社
サーバ装置、情報処理方法、プログラム及び記憶媒体
1か月前
パイオニア株式会社
表示制御装置、制御方法、プログラム、及び記憶媒体
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ