TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025035907
公報種別
公開特許公報(A)
公開日
2025-03-14
出願番号
2023143245
出願日
2023-09-04
発明の名称
搬送装置、及び排除装置
出願人
株式会社日立インダストリアルプロダクツ
代理人
藤央弁理士法人
主分類
G05D
1/43 20240101AFI20250307BHJP(制御;調整)
要約
【課題】無人搬送車の走行異常を防止する。
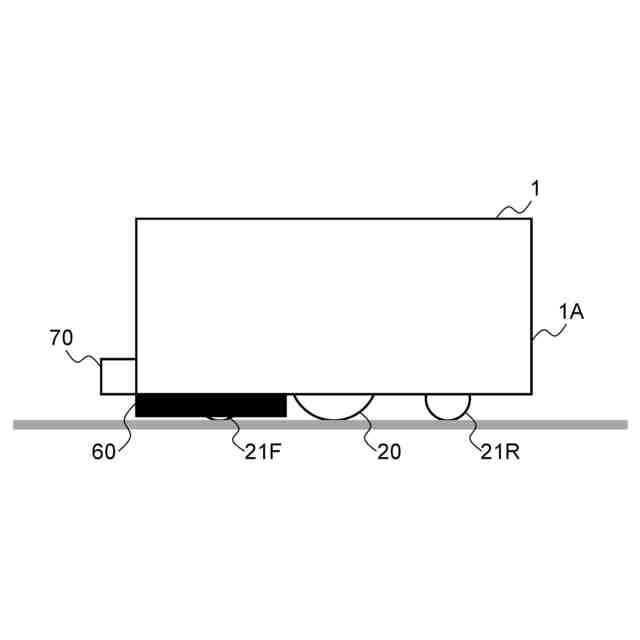
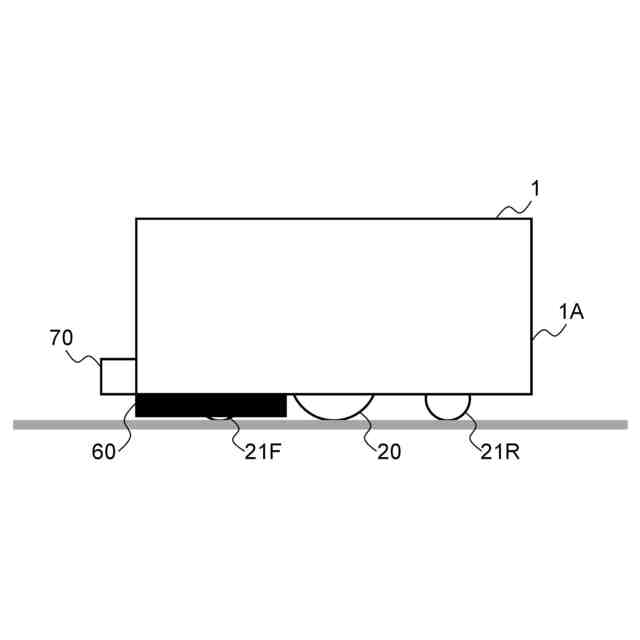
【解決手段】搬送対象物を搬送する搬送装置であって、所定の演算処理を実行する演算装置と、前記演算装置に接続された記憶装置とを有する制御部と、車体底面の左右に配置され、動力によって回転する駆動輪と、車体底面の左右に配置され、自由に回転可能な補助輪と、車体底面から下方に延伸し、前記搬送装置の前側に取り付けられる排除装置とを備え、前記排除装置は、前記補助輪を覆う幅を有し、中央部より側部が後退した形状に形成され、前記排除装置に近い前記補助輪の外側を覆う位置まで延伸しており、前記排除装置は、前記搬送装置の前進時に障害物を車体側方へ排除し、前記搬送装置の回転時に障害物を回転方向へ排除する。
【選択図】図1A
特許請求の範囲
【請求項1】
搬送対象物を搬送する搬送装置であって、
所定の演算処理を実行する演算装置と、前記演算装置に接続された記憶装置とを有する制御部と、
車体底面の左右に配置され、動力によって回転する駆動輪と、
車体底面の左右に配置され、自由に回転可能な補助輪と、
車体底面から下方に延伸し、前記搬送装置の前側に取り付けられる排除装置とを備え、
前記排除装置は、前記補助輪を覆う幅を有し、中央部より側部が後退した形状に形成され、前記排除装置に近い前記補助輪の外側を覆う位置まで延伸しており、
前記排除装置は、前記搬送装置の前進時に障害物を車体側方へ排除し、前記搬送装置の回転時に障害物を回転方向へ排除することを特徴とする搬送装置。
続きを表示(約 1,500 文字)
【請求項2】
請求項1に記載の搬送装置であって、
前記補助輪は、車体底面の前左側、前右側、後左側、後右側の各々に配置され、
前記駆動輪は、車体底面の左側の補助輪の間と、車体底面の右側の補助輪の間の各々に配置され、
前記排除装置は、前記排除装置に近い前記補助輪の外側を覆い、前記駆動輪の手前までを覆う位置に配置されることを特徴とする搬送装置。
【請求項3】
請求項1に記載の搬送装置であって、
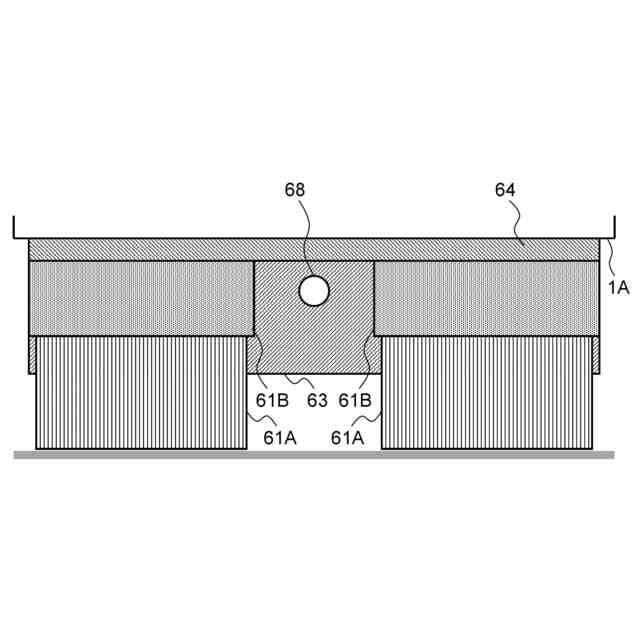
前記排除装置は、
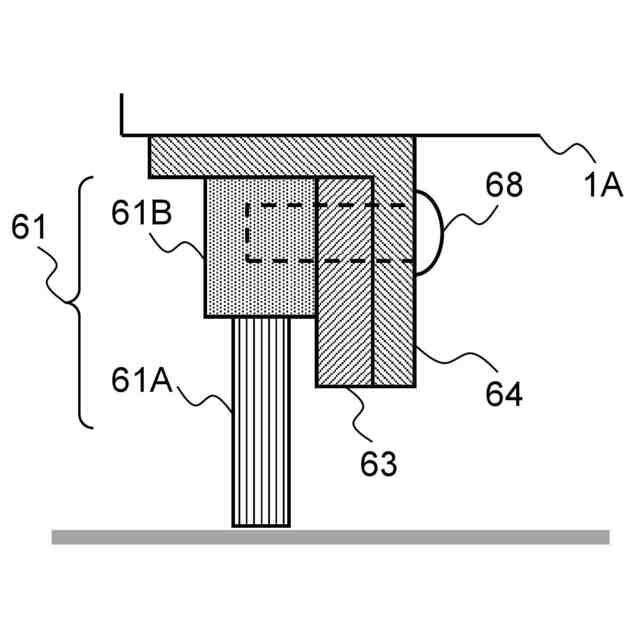
前記搬送装置の走行時に障害物と接触する排除子と、
前記排除子の上部を支持する支持部材と、
前記搬送装置の車体に取り付けられる支持部材固定具とを有し、
前記支持部材はボルトによって前記支持部材固定具に取り付けられることを特徴とする搬送装置。
【請求項4】
請求項1に記載の搬送装置であって、
前記搬送装置が走行する床面には、床面が低い位置となる段差を有する障害物回収エリアが設けられ、
前記搬送装置は、前側補助輪が前記段差の手前かつ前記排除装置が段差を超える位置に停止して、前記排除装置に保持された障害物を前記低い位置の床面に落として分離することを特徴とする搬送装置。
【請求項5】
請求項4に記載の搬送装置であって、
前記障害物回収エリアに前進で進入し、
前側補助輪が前記段差の手前かつ前記排除装置が段差を超える位置に停止した後に後退して、前記排除装置に保持された障害物を分離することを特徴とする搬送装置。
【請求項6】
請求項1に記載の搬送装置であって、
前記補助輪は、車体底面の前左側、前右側、後左側、後右側の各々に配置され、
前記駆動輪は、車体底面の左側の補助輪の間と、車体底面の右側の補助輪の間の各々に配置され、
前記排除装置は、全ての前記駆動輪の外側及び全ての前記補助輪の外側を覆う位置に配置されることを特徴とする搬送装置。
【請求項7】
請求項3に記載の搬送装置であって、
支持部材固定具は支持部材を上下方向に移動可能にする案内部を有し、前記支持部材は前記案内部と係合する部材を有し、
前記排除子は、水平方向への移動が拘束され、かつ上下方向に移動可能に前記搬送装置の車体に取り付けられることを特徴とする搬送装置。
【請求項8】
請求項1に記載の搬送装置であって、
接触する物体を検出する接触センサと、
前記接触センサの前方に配置される検出部材と、
前記検出部材を水平に移動可能に支持する支持部材とを有し、
前記検出部材が後方に付勢されると、前記接触センサが押されることを特徴とする搬送装置。
【請求項9】
搬送対象物を搬送する搬送装置に取り付け可能な排除装置であって、
前記搬送装置は、
所定の演算処理を実行する演算装置と、前記演算装置に接続された記憶装置とを有する制御部と、
車体底面の左右に配置され、動力によって回転する駆動輪と、
車体底面の左右に配置され、自由に回転可能な補助輪と、
車体底面から下方に延伸し、前記搬送装置の前側に取り付けられる排除装置とを有し、
前記排除装置は、
前記補助輪を覆う幅を有し、
中央部より側部が後退した形状に形成され、
前記搬送装置に取り付けられた場合、前記排除装置に近い前記補助輪の側部を覆う位置まで延伸する長さを有し、
前記搬送装置の前進時に障害物を車体側方へ排除し、
前記搬送装置の回転時に障害物を回転方向へ排除することを特徴とする排除装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、搬送装置及び搬送装置に取り付けられる排除装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
無人搬送車は、走行路上の障害物を検知するための接触式及び非接触式センサを有することがある。しかし障害物が小さいとセンサに検知されず、車体下部と床の間に障害物が侵入し、走行を妨害する場合がある。
【0003】
この課題に対して特許文献1(特開平4-121267号公報)に記載された技術がある。特許文献1には、車体中央部の駆動車輪の前後のバッテリ収納下部のバッテリフレームと床面の隙間部に非磁性金属又は合成樹脂から成る磁石収納ケースの中央部に車体幅を被う長さの磁石をバネ鋼の様な弾性体から成る磁石ホルダにより装着し、前記磁石の前後に無人搬送車の進行方向に対して中央部が“山”外側が“谷”になる様にハ形状の傾斜を付けた弾性体から成る清掃子を配し、後側の床清掃装置の清掃子を前記と逆の逆ハ形状に装着した事を特徴とする無人搬送車の床清掃装置が記載されている。
【先行技術文献】
【特許文献】
【0004】
特開平4-121267号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載された技術では、切屑や塵埃などの微小物を走行路から除去する。一方、無人搬送車が走行する物流倉庫等において、保管棚から落下した商品が障害物となることがある。
【0006】
近年のEコマース事業の発展により、多様な品種を保管する物流倉庫が増加している。このような倉庫では、無人搬送車の走行路上に落下する商品は多岐にわたるため、車体下部に侵入する障害物も様々である。障害物となる商品の形状によっては、駆動輪や補助輪に巻き込まれたり、絡まることで、無人搬送車の制御が困難になることがある。
【0007】
また、無人搬送車の走行路上に自己位置推定のためのガイドとして磁気テープやマーカが敷設されることがあり、落下した商品が無人搬送車のガイドの認識を妨害することがある。
【0008】
さらに、無人搬送車は直進動作の他、回転動作をすることから、前方からの障害物の巻き込みを防止するだけでなく、側方からの障害物の巻き込みを防止する必要がある。
【0009】
本発明は、前述のような走行路上の障害物に起因して生じる無人搬送車の走行異常の防止を目的とする。
【課題を解決するための手段】
【0010】
本願において開示される発明の代表的な一例を示せば以下の通りである。すなわち、搬送対象物を搬送する搬送装置であって、所定の演算処理を実行する演算装置と、前記演算装置に接続された記憶装置とを有する制御部と、車体底面の左右に配置され、動力によって回転する駆動輪と、車体底面の左右に配置され、自由に回転可能な補助輪と、車体底面から下方に延伸し、前記搬送装置の前側に取り付けられる排除装置とを備え、前記排除装置は、前記補助輪を覆う幅を有し、中央部より側部が後退した形状に形成され、前記排除装置に近い前記補助輪の外側を覆う位置まで延伸しており、前記排除装置は、前記搬送装置の前進時に障害物を車体側方へ排除し、前記搬送装置の回転時に障害物を回転方向へ排除することを特徴とする。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
無人作業システム
2か月前
アズビル株式会社
制御装置
1か月前
和研工業株式会社
多連レバー機構
8日前
コフロック株式会社
流量制御装置
1か月前
スター精密株式会社
工作機械
24日前
株式会社丸和製作所
入力機器
1か月前
ローム株式会社
半導体集積回路
3日前
株式会社フジキン
流量制御装置
1か月前
株式会社豊田自動織機
荷役車両
1か月前
株式会社ダイフク
搬送設備
2か月前
株式会社シンテックホズミ
搬送ロボット
1か月前
株式会社村田製作所
温度補償回路
2か月前
愛知機械テクノシステム株式会社
無人搬送車
17日前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
2か月前
国立大学法人広島大学
モデル誤差抑制補償器
29日前
アズビル株式会社
制御システムおよび制御方法
9日前
アズビル株式会社
制御システムおよび制御方法
9日前
ルネサスエレクトロニクス株式会社
半導体装置
1か月前
アズビル株式会社
制御システムおよび制御方法
18日前
日本精工株式会社
制御装置および制御方法
15日前
トヨタ自動車株式会社
自律走行装置
29日前
チームラボ株式会社
走行システム及び走行路
22日前
ローム株式会社
半導体装置
29日前
トヨタ自動車株式会社
群制御システム及び群制御方法
17日前
村田機械株式会社
稼働監視システム及び稼働監視方法
18日前
ミツミ電機株式会社
電源回路及びその起動方法
29日前
日本精工株式会社
制御システムおよび制御方法
29日前
ブラザー工業株式会社
調整方法及び数値制御装置
1か月前
株式会社FUJI
工作機械
1か月前
ミツミ電機株式会社
多方向入力装置
15日前
ミツミ電機株式会社
多方向入力装置
15日前
ミツミ電機株式会社
多方向入力装置
15日前
ローム株式会社
定電圧生成回路
1か月前
ミツミ電機株式会社
多方向入力装置
15日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ