TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025035322
公報種別
公開特許公報(A)
公開日
2025-03-13
出願番号
2023142298
出願日
2023-09-01
発明の名称
制御装置、制御方法、および制御プログラム
出願人
株式会社デンソー
,
トヨタ自動車株式会社
代理人
弁理士法人ゆうあい特許事務所
主分類
G06T
7/60 20170101AFI20250306BHJP(計算;計数)
要約
【課題】高度運転支援車両あるいは自動運転車両の早期且つ広範囲の普及を図ること。
【解決手段】車両(V)に搭載される制御装置(2)は、プログラム命令を実行するプロセッサ(21)を備えている。プロセッサは、以下の処理を実行する。車両に搭載された画像センサ(34)により取得した画像に基づいて、画像を構成する画素の特徴パラメータの周期的変化態様を算出する。算出した周期的変化態様に基づいて、物標までの距離を推定する。
【選択図】図2
特許請求の範囲
【請求項1】
車両(V)に搭載される制御装置(2)であって、
プログラム命令を実行するプロセッサ(21)と、
前記プログラム命令を記憶する非遷移的実体的記録媒体であるメモリ(22)と、
を備え、
前記プロセッサは、
前記車両に搭載された画像センサ(34)により取得した画像に基づいて、前記画像を構成する画素の特徴パラメータの周期的変化態様を算出し、
算出した前記周期的変化態様に基づいて、前記物標までの距離を推定する、
制御装置。
続きを表示(約 860 文字)
【請求項2】
前記画像は、前記画像センサが撮影した1枚の画像である、
請求項1に記載の制御装置。
【請求項3】
前記プロセッサは、算出した前記周期的変化態様と、あらかじめ用意された前記周期的変化態様と前記距離との対応関係とに基づいて、前記距離を推定する、
請求項1に記載の制御装置。
【請求項4】
前記プロセッサは、フーリエ変換またはウェーブレット変換を用いて、前記周期的変化態様を算出する、
請求項1に記載の制御装置。
【請求項5】
前記周期的変化態様は、前記特徴パラメータの変化を表す波形に対して周波数解析手法を適用することで算出された周波数スペクトルにおけるピークに対応する代表周期である、
請求項1に記載の制御装置。
【請求項6】
前記プロセッサは、前記周波数スペクトルにおける最も大きい強度を有する前記ピークによって前記代表周期を取得する、
請求項5に記載の制御装置。
【請求項7】
前記プロセッサは、前記周波数スペクトルにおける閾値以上の強度を有する前記ピークによって前記代表周期を取得する、
請求項5に記載の制御装置。
【請求項8】
前記プロセッサは、前記周波数スペクトルにおける前記閾値以上の強度を有する複数の前記ピークに基づいて推定した第一推定距離と、他の測距手法により推定した第二推定距離とに基づいて、前記距離を推定する、
請求項7に記載の制御装置。
【請求項9】
前記プロセッサは、前記画像センサから当該画像センサの視野内の物標(B)に向かう検出方向と交差する検出幅方向についての、前記特徴パラメータの前記周期的変化態様を算出する、
請求項1に記載の制御装置。
【請求項10】
前記検出方向は、前記車両の進行方向である、
請求項9に記載の制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両に搭載される、制御装置、制御方法、および制御プログラムに関するものである。
続きを表示(約 5,000 文字)
【背景技術】
【0002】
近年、自動車等の車両における、いわゆる運転支援技術あるいは自動運転技術に関する研究開発が盛んに進められており、これに関する種々の提案がなされている(例えば特許文献1等参照)。運転支援技術は、ドライバの負担を軽減して快適且つ安全に運転できるようにする技術であって、例えば、追従車間距離制御、車線維持支援制御、車線変更支援制御、駐車支援制御、障害物注意喚起、衝突回避支援制御、等が含まれる。自動運転技術は、ドライバの運転操作を必要とせずに車両を自動的すなわち自律的に走行させる技術である。かかる運転支援技術あるいは自動運転技術を実装した車両には、その前方領域や周辺領域の状況を把握するための、カメラやレーダ等のセンシングデバイスが搭載される。そして、走行中の車両がカメラ等のセンシングデバイスおよび地図情報等を用いて取得した道路状況等に基づいて、操舵、駆動、ブレーキ等の車両制御が自動で行われる。車線ごとの道路データを含む高精度地図を用いることで、安全性や信頼性を向上させることが可能となる。
【先行技術文献】
【特許文献】
【0003】
国際公開第2019/202397号
【発明の概要】
【発明が解決しようとする課題】
【0004】
この種の運転支援技術や自動運転技術については、センシングデバイスによる検出あるいは認識の精度向上や、利便性の向上等の、様々な視点から、近年、研究開発が加速化している。すなわち、かかる性能をよりいっそう向上することで、いわゆる高度運転支援車両や自動運転車両の早期且つ広範囲の普及を図ることが可能となる。本開示は、上記に例示した事情等に鑑みてなされたものである。
【課題を解決するための手段】
【0005】
請求項1に記載の、車両(V)に搭載される制御装置(2)は、
プログラム命令を実行するプロセッサ(21)と、
前記プログラム命令を記憶する非遷移的実体的記録媒体であるメモリ(22)と、
を備え、
前記プロセッサは、
前記車両に搭載された画像センサ(34)により取得した画像に基づいて、前記画像を構成する画素の特徴パラメータの周期的変化態様を算出し、
算出した前記周期的変化態様に基づいて、前記物標までの距離を推定する。
請求項14に記載の制御方法は、車両(V)に搭載される制御装置(2)に備えられたプロセッサ(21)により実行されるものであって、
前記車両に搭載された画像センサ(34)により取得した画像に基づいて、前記画像を構成する画素の特徴パラメータの周期的変化態様を算出し、
算出した前記周期的変化態様に基づいて、前記物標までの距離を推定する。
請求項15に記載の制御プログラムは、車両(V)に搭載される制御装置(2)に備えられたプロセッサ(21)により実行される、コンピュータ読み取り可能なプログラムであって、
前記プロセッサにより実行される処理は、
前記車両に搭載された画像センサ(34)により取得した画像に基づいて、前記画像を構成する画素の特徴パラメータの周期的変化態様を算出する処理と、
算出した前記周期的変化態様に基づいて、前記物標までの距離を推定する処理と、
を含む。
【0006】
なお、出願書類中の各欄において、各要素に括弧付きの参照符号が付されている場合がある。この場合、参照符号は、単に、同要素と後述する実施形態に記載の具体的構成との対応関係の一例を示すものであるにすぎない。よって、本開示は、参照符号の記載によって、何ら限定されるものではない。
【図面の簡単な説明】
【0007】
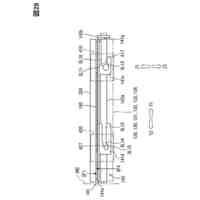
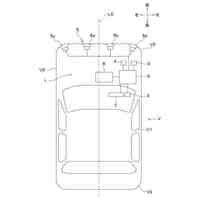
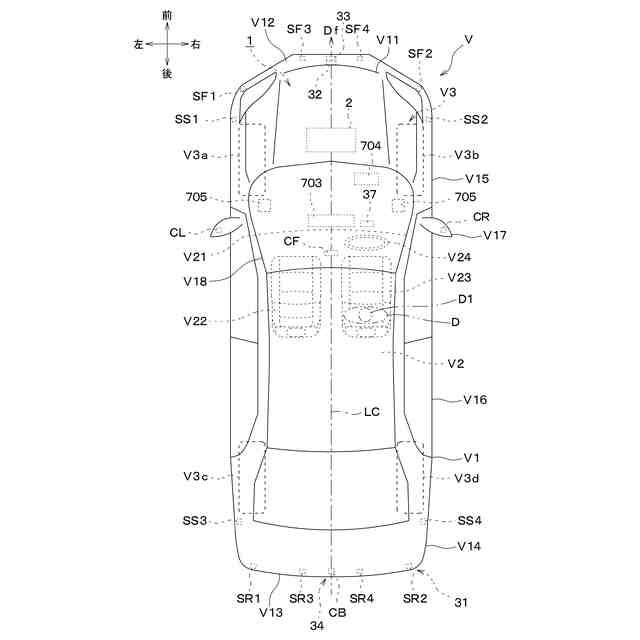
実施形態に係る制御装置としての運転ECUを含む車載システムを搭載した車両の概略的な構成を示す平面図である。
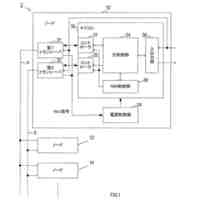
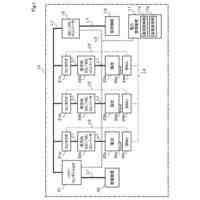
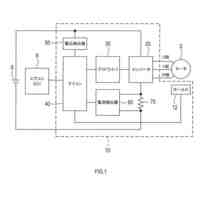
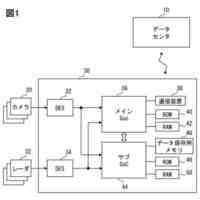
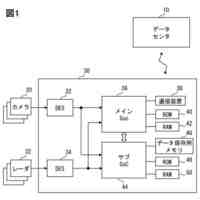
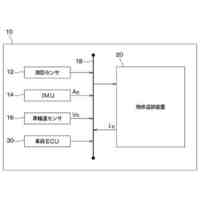
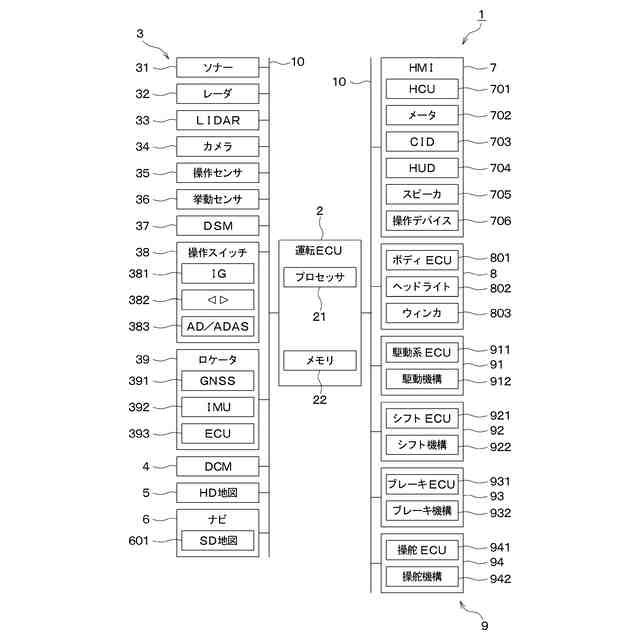
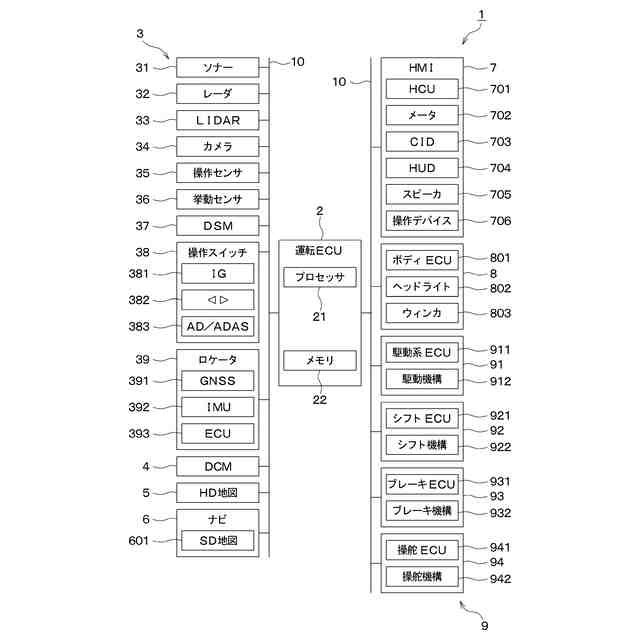
図1に示された車載システムの全体構成を示す概略的なブロック図である。
図2に示されたソナーセンサを用いた物標検知の概略を示す図である。
図2に示されたソナーセンサを用いた物標検知の概略を示す図である。
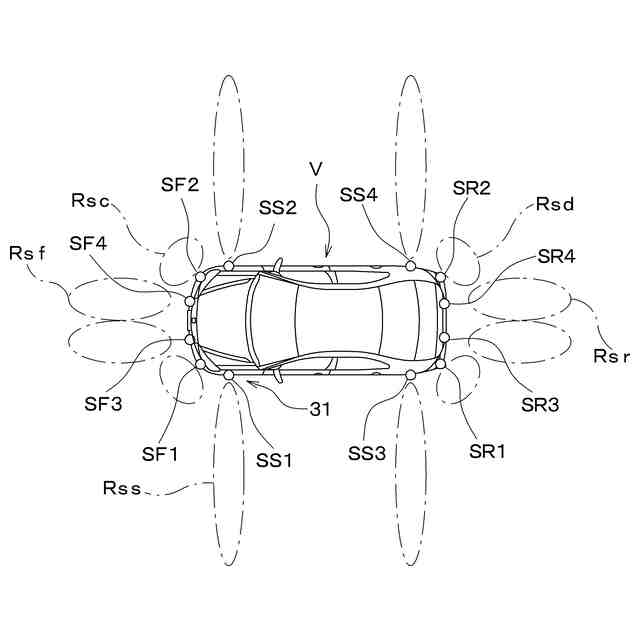
図2に示された複数のソナーセンサの各々における物標検知範囲の概略を示す図である。
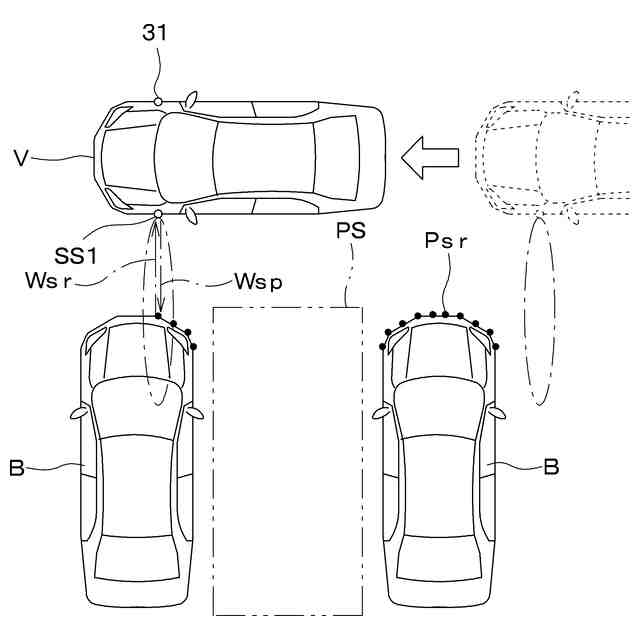
図2に示されたソナーセンサを用いた駐車スペース検知の概略を示す図である。
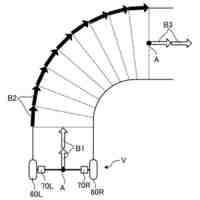
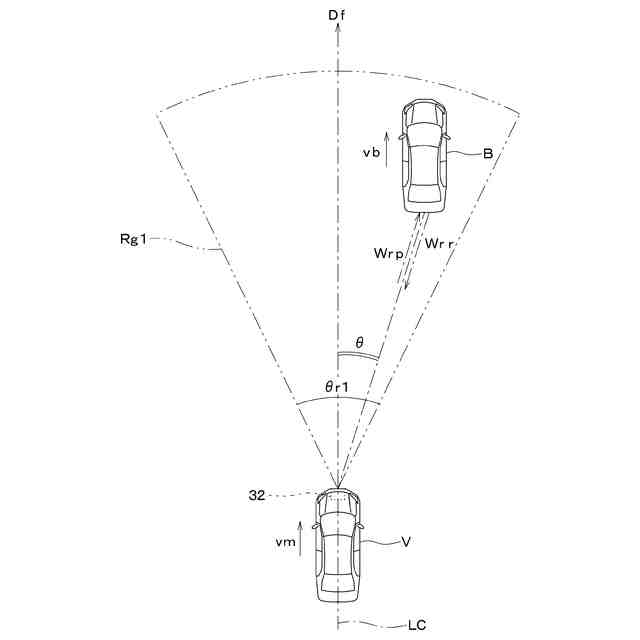
図2に示されたレーダセンサを用いた物標検知の概略を示す図である。
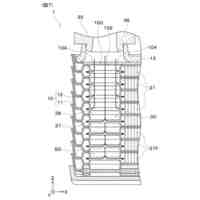
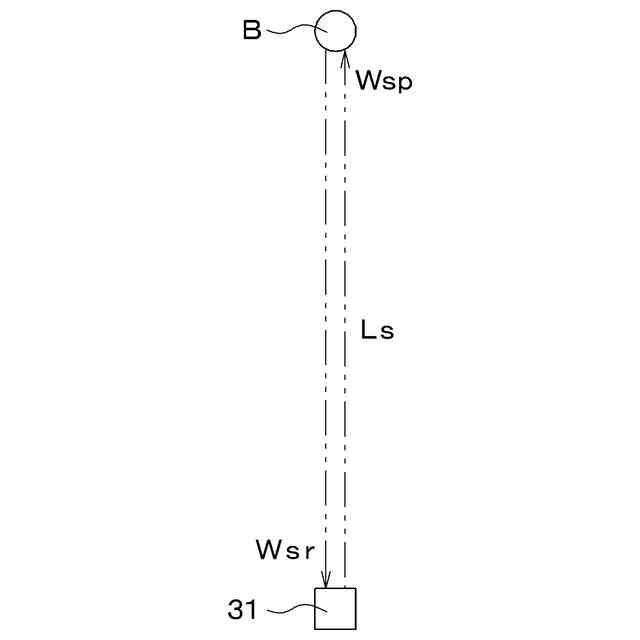
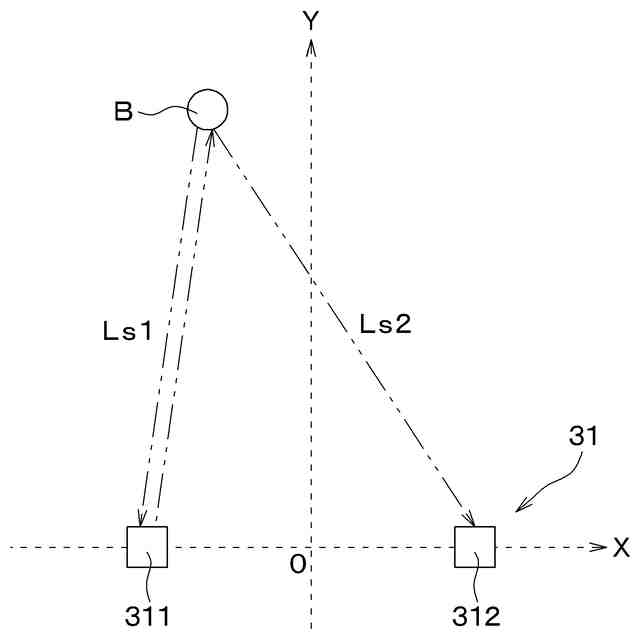
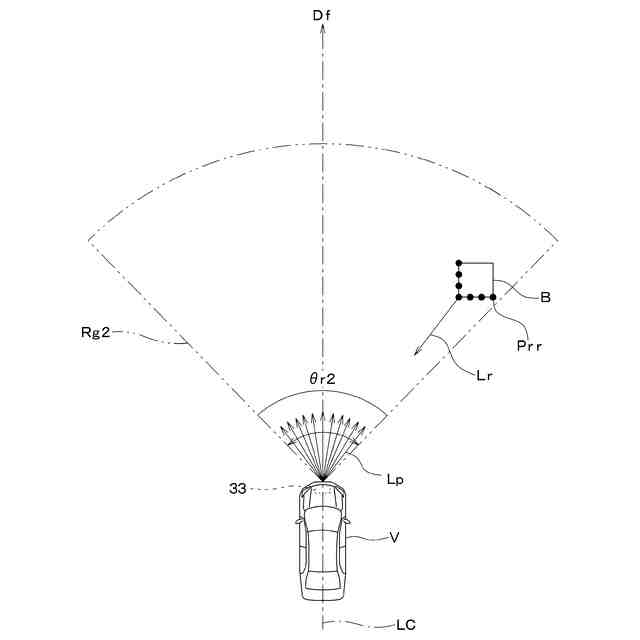
図2に示されたレーザレーダセンサを用いた物標検知の概略を示す図である。
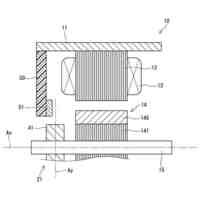
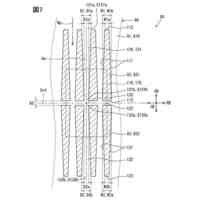
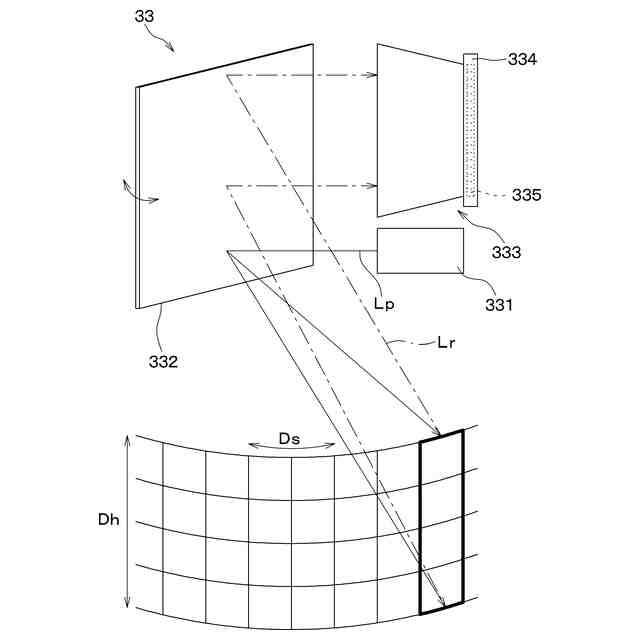
図8に示されたレーザレーダセンサの構成および動作の概略を示す図である。
図2に示されたカメラを用いた物標検知の概略を示す図である。
図2に示されたカメラを用いた物標検知の概略を示す図である。
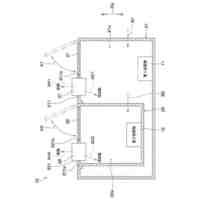
図2に示されたドライバ状態モニタを用いたドライバ状態検知の概略を示す図である。
図2に示されたドライバ状態モニタを用いたドライバ状態検知の概略を示す図である。
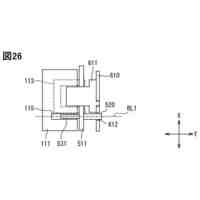
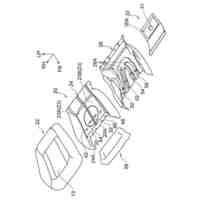
図2に示されたヘッドアップディスプレイの概略構成を示す図である。
図14に示されたドライバの視点からフロントウィンドシールド越しの自車両前方の路面とダッシュボードの一部とを見た様子を示す概略図である。
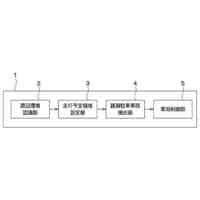
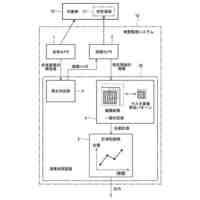
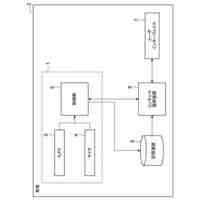
図2に示された運転ECUにて実現される概略的な機能構成の一例を示すブロック図である。
図16に示された認知部にて実現される概略的な機能構成の一例を示すブロック図である。
実施形態における認知対象である物標の具体例を示す概略図である。
実施形態における認知対象である物標の具体例を示す概略図である。
実施形態における認知対象である物標の具体例を示す概略図である。
実施形態における認知対象である物標の具体例を示す概略図である。
実施形態における認知対象である物標の具体例を示す概略図である。
実施形態における認知対象である物標の具体例を示す概略図である。
実施形態における認知対象である物標の具体例を示す概略図である。
実施形態における認知対象である物標の具体例を示す概略図である。
実施形態における認知対象である物標の具体例を示す概略図である。
実施形態における認知対象である物標の具体例を示す概略図である。
実施形態における物標認知結果を利用した制御シーンの一例を示す概略図である。
実施形態における物標認知結果を利用した制御シーンの他の一例を示す概略図である。
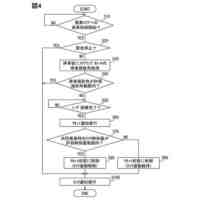
図17に示された路面標示認識における処理の一例を示すフローチャートである。
実施形態における認知対象のうちの1つである横断歩道が経年劣化した状態を示す概略図である。
横断歩道が遮蔽物により遮蔽された状態を示す概略図である。
横断歩道が自車両から比較的遠い場合の自車両からの見え方の一例を示す概略図である。
横断歩道が自車両に比較的近い場合の自車両からの見え方の一例を示す概略図である。
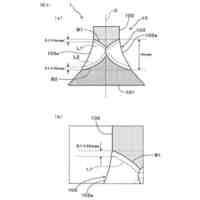
横断歩道における標示パターン形状の概略を示すグラフである。
図33における一点鎖線で示された仮想水平線に沿った画素特徴パラメータの変化の様子を示すグラフである。
図34における一点鎖線で示された仮想水平線に沿った画素特徴パラメータの変化の様子を示すグラフである。
横断歩道までの距離とペイント周期との関係を示すグラフである。
図38に示された関係の取得方法を示すグラフである。
横断歩道に掠れや遮蔽が存在する場合の道路幅員方向における画素特徴パラメータの変化の様子を示すグラフである。
図40に示された画素特徴パラメータの変化をフーリエ変換した結果を示すグラフである。
横断歩道が自車両から遠い場合の実際の横断歩道の道路幅員方向における画素特徴パラメータの変化の様子を示すグラフである。
図42Aに示された画素特徴パラメータの変化をフーリエ変換した結果を示すグラフである。
横断歩道と自車両との距離が中程度である場合の実際の横断歩道の道路幅員方向における画素特徴パラメータの変化の様子を示すグラフである。
図43Aに示された画素特徴パラメータの変化をフーリエ変換した結果を示すグラフである。
横断歩道が自車両に近い場合の実際の横断歩道の道路幅員方向における画素特徴パラメータの変化の様子を示すグラフである。
図44Aに示された画素特徴パラメータの変化をフーリエ変換した結果を示すグラフである。
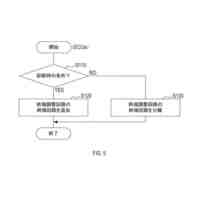
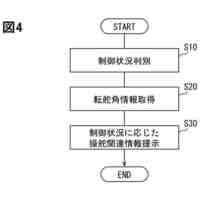
本実施形態における距離推定処理の概略を示すフローチャートである。
本実施形態における距離推定対象の他の例を示す概略図である。
本実施形態における距離推定対象のさらに他の例を示す概略図である。
本実施形態における距離推定対象のさらに他の例を示す概略図である。
本実施形態における距離推定対象のさらに他の例を示す概略図である。
本実施形態における距離推定対象のさらに他の例を示す概略図である。
本実施形態における距離推定対象のさらに他の例を示す概略図である。
【発明を実施するための形態】
【0008】
(実施形態)
以下、本開示の例示的な実施形態について、適宜図面を参照しつつ説明する。なお、実施形態に対しては、適宜、構成や機能や実装例についての変更が可能である。よって、明細書中において、複数の実施形態や変形例を記載することがある。この場合、以下の説明において、或る1つの実施形態と他の実施形態との間、或る1つの実施形態とその変形例との間、あるいは、或る1つの変形例と他の変形例との間で、相互に同一または均等である部分については、同一の参照符号を付与するものとする。そして、かかる部分に関する、先行する説明は、技術的矛盾または特段の追加説明なき限り、後行する他の実施形態あるいは変形例に適宜援用され得るものとする。
【0009】
(車両全体構成)
図1を参照すると、本開示の適用対象としての車両であるシステム搭載車両Vは、いわゆる四輪自動車であって、平面視にて略矩形状の車体V1を備えている。以下、システム搭載車両Vの車幅方向における中心を通り、且つシステム搭載車両Vにおける車両全長方向と平行な仮想直線を、車両中心線LCと称する。図1において、車幅方向は図中左右方向である。車両全長方向は、車幅方向と直交し且つ車高方向と直交する方向である。車高方向は、システム搭載車両Vの車高を規定する方向であって、システム搭載車両Vを走行可能な状態で水平面上に安定的に載置した場合の重力作用方向と平行な方向である。また、説明の便宜上、システム搭載車両Vにおける「前」「後」「左」「右」を、図1中にて矢印で示された通りに定義する。すなわち、車両全長方向は、前後方向と同義である。また、車幅方向は、左右方向と同義である。なお、車高方向は、システム搭載車両Vの載置条件または走行条件により、重力作用方向と平行とはならない場合があり得る。もっとも、車高方向は、多くの場合、重力作用方向に沿った方向となる。
【0010】
車体V1の内側には、ドライバDを含む乗員の搭乗空間を構成する車室V2が形成されている。また、車体V1における四隅の各々には、車輪V3が設けられている。すなわち、車体V1における左前部には、左前輪V3aが設けられている。車体V1における右前部には、右前輪V3bが設けられている。車体V1における左後部には、左後輪V3cが設けられている。車体V1における右後部には、右後輪V3d設けられている。なお、システム搭載車両Vは、四輪自動車に限定されず、3輪自動車であってもよいし、貨物トラック等の6輪または8輪自動車であってもよい。駆動輪の位置や数についても、特段の限定はない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
電子装置
今日
株式会社デンソー
通信装置
今日
株式会社デンソー
光学部材
1日前
株式会社デンソー
熱交換器
今日
株式会社デンソー
熱交換器
今日
株式会社デンソー
保冷容器
今日
株式会社デンソー
半導体装置
今日
株式会社デンソー
光位相変調器
今日
株式会社デンソー
電子制御装置
今日
株式会社デンソー
電子制御装置
今日
株式会社デンソー
電子制御装置
今日
株式会社デンソー
電子制御装置
今日
株式会社デンソー
通信システム
今日
株式会社デンソー
モータ制御装置
今日
株式会社デンソー
回転角度検出装置
今日
株式会社デンソー
回転電機のステータ
6日前
株式会社デンソーテン
制御装置および制御方法
1日前
株式会社デンソー
インピーダンス測定装置
今日
株式会社デンソー
車両用電子制御装置及び方法
今日
株式会社デンソー
車両用電子制御装置及び方法
今日
株式会社SOKEN
駆動装置
今日
日本発條株式会社
車両用シート
今日
株式会社SOKEN
運転支援装置
今日
株式会社デンソー
視覚監視システム及び視覚監視方法
今日
株式会社デンソー
モータ制御装置及びモータ制御方法
今日
株式会社デンソー
制御装置、制御方法、制御プログラム
今日
株式会社デンソー
制御装置、制御方法、制御プログラム
今日
株式会社デンソー
物体追跡装置および物体追跡プログラム
1日前
株式会社デンソー
物体検知装置および物体検知プログラム
1日前
トヨタ自動車株式会社
感情判定システム
今日
株式会社デンソー
スパークプラグ電極およびスパークプラグ
1日前
株式会社デンソー
制御装置、制御方法、および制御プログラム
今日
株式会社デンソー
3レベルインバータの制御装置、及びプログラム
1日前
株式会社デンソーテン
レバースイッチ、ディスプレイ装置、及び車載機器
今日
株式会社デンソーテン
映像処理装置、車載カメラシステムおよび映像処理方法
今日
株式会社デンソーテン
充電制御装置、車載装置、充電制御方法、及び充電制御プログラム
今日
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ