TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025032718
公報種別
公開特許公報(A)
公開日
2025-03-12
出願番号
2023138165
出願日
2023-08-28
発明の名称
制御装置および制御方法
出願人
株式会社デンソーテン
代理人
弁理士法人酒井国際特許事務所
主分類
B60W
30/045 20120101AFI20250305BHJP(車両一般)
要約
【課題】車両の旋回時、運転操作に対する違和感をドライバに与えにくくすることができる制御装置および制御方法を提供する。
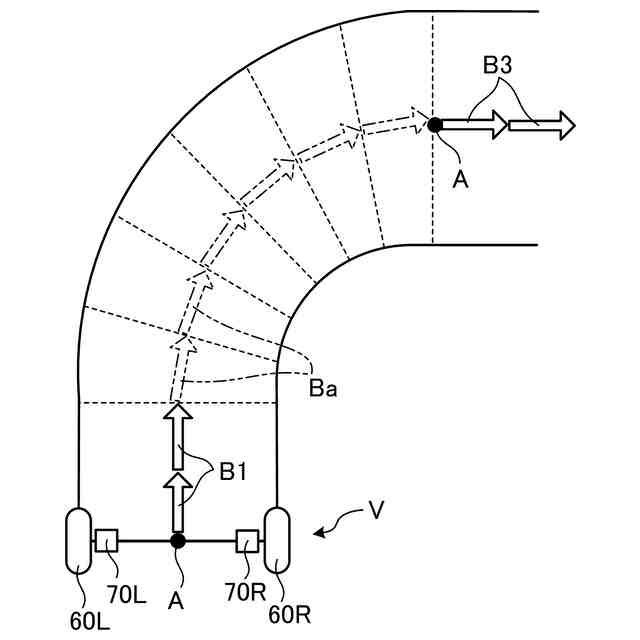
【解決手段】実施形態の一態様に係る制御装置は、車両の内輪と外輪とをモータで個別駆動可能なコントローラを備える。コントローラは、アクセル操作の入力量に応じて、車両の車幅方向の基準位置に対し目標速度を設定し、目標速度になるように、内輪および外輪の目標回転数をそれぞれ設定するものであり、車両の旋回走行時は、基準位置を、直進走行時の基準位置よりも外輪側に変更する。
【選択図】図1C
特許請求の範囲
【請求項1】
車両の内輪と外輪とをモータで個別駆動可能なコントローラを備え、
前記コントローラは、
アクセル操作の入力量に応じて、前記車両の車幅方向の基準位置に対し目標速度を設定し、前記目標速度になるように、前記内輪および前記外輪の目標回転数をそれぞれ設定するものであり、
前記車両の旋回走行時は、前記基準位置を、直進走行時の前記基準位置よりも前記外輪側に変更する、
制御装置。
続きを表示(約 840 文字)
【請求項2】
前記制御装置は、
ステアリングの舵角に応じて前記基準位置を変更する、
請求項1に記載の制御装置。
【請求項3】
前記制御装置は、
前記車両に搭載された加速度センサによって検出される外輪方向への加速度に応じて、前記車両が旋回しているか否かを判定する、
請求項1に記載の制御装置。
【請求項4】
前記制御装置は、
前記車両の左右の前輪のうちの前記外輪側に前記基準位置を変更する、
請求項1に記載の制御装置。
【請求項5】
前記制御装置は、
前記車両が前方向に下り傾斜する走行路を走行している場合、前記目標速度に上限値を設定する、
請求項1に記載の制御装置。
【請求項6】
前記制御装置は、
前記車両が前記外輪方向に下り傾斜する走行路を走行している場合、前記目標速度に上限値を設定する、
請求項1に記載の制御装置。
【請求項7】
車両の内輪と外輪とをモータで個別駆動可能なコントローラが実行する制御方法であって、
アクセル操作の入力量に応じて、前記車両の車幅方向の基準位置に対し目標速度を設定し、前記目標速度になるように、前記内輪および前記外輪の目標回転数をそれぞれ設定し、
前記車両の旋回走行時は、前記基準位置を、直進走行時の前記基準位置よりも前記外輪側に変更する、
制御方法。
【請求項8】
内輪と外輪とを個別駆動する車両のモータを制御する制御装置であって、
直進走行時は、アクセル操作の入力量に応じて目標速度を設定し、前記車両が前記目標速度になるように、前記モータの回転数を制御し、
旋回走行時は、前記アクセル操作の入力量に応じて前記外輪の目標速度を設定し、前記外輪が前記目標速度になるように、前記モータの回転数を制御する、
制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御装置および制御方法に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、車両が前方にあるカーブを曲がる際に、カーブの曲率半径に基づいて旋回時の目標速度を設定する技術が提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2010-89700号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記の従来技術にあっては、目標速度を変更して旋回するため、ドライバはアクセル操作の入力量(操作量)によって期待する速度と異なる速度で旋回が行われ、運転操作に対して違和感を抱く可能性がある。
【0005】
本発明は、上記に鑑みてなされたものであって、車両の旋回時、運転操作に対する違和感をドライバに与えにくくすることができる制御装置および制御方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決し、目的を達成するために、本発明に係る制御装置は、車両の内輪と外輪とをモータで個別駆動可能なコントローラを備える。前記コントローラは、アクセル操作の入力量に応じて、前記車両の車幅方向の基準位置に対し目標速度を設定し、前記目標速度になるように、前記内輪および前記外輪の目標回転数をそれぞれ設定するものであり、前記車両の旋回走行時は、前記基準位置を、直進走行時の前記基準位置よりも前記外輪側に変更する。
【0007】
また、本発明に係る制御装置は、内輪と外輪とを個別駆動する車両のモータを制御する。制御装置は、直進走行時は、アクセル操作の入力量に応じて目標速度を設定し、前記車両が前記目標速度になるように、前記モータの回転数を制御し、旋回走行時は、前記アクセル操作の入力量に応じて前記外輪の目標速度を設定し、前記外輪が前記目標速度になるように、前記モータの回転数を制御する。
【発明の効果】
【0008】
本発明によれば、車両の旋回時、運転操作に対する違和感をドライバに与えにくくすることができる。
【図面の簡単な説明】
【0009】
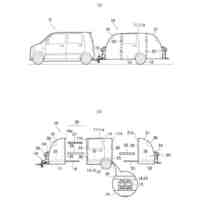
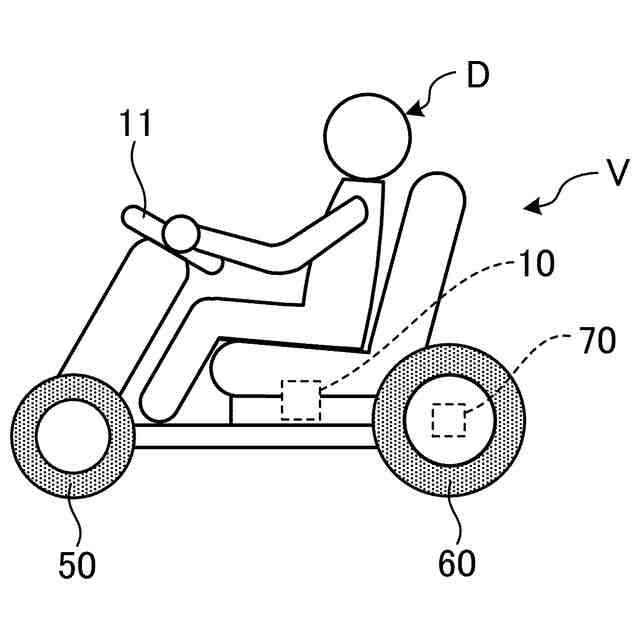
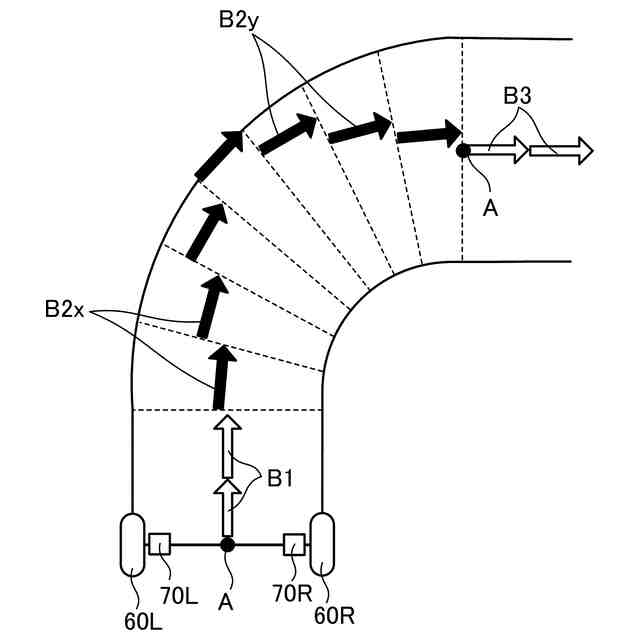
図1Aは、第1実施形態に係る制御装置による制御方法の概要を説明する図である。
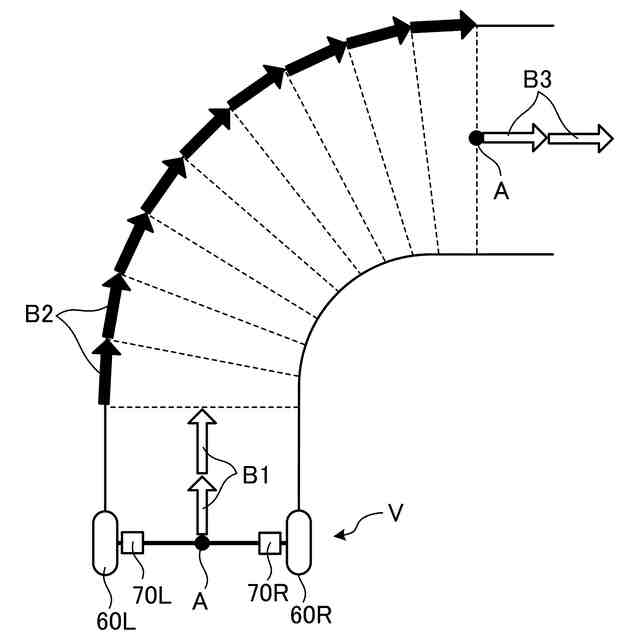
図1Bは、従来技術に係る制御装置による制御方法の概要を説明する図である。
図1Cは、第1実施形態に係る制御装置による制御方法の概要を説明する図である。
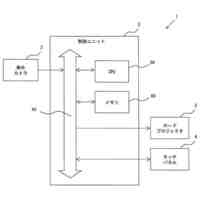
図2は、第1実施形態に係る制御装置の構成を示すブロック図である。
図3は、係数情報を説明するための図である。
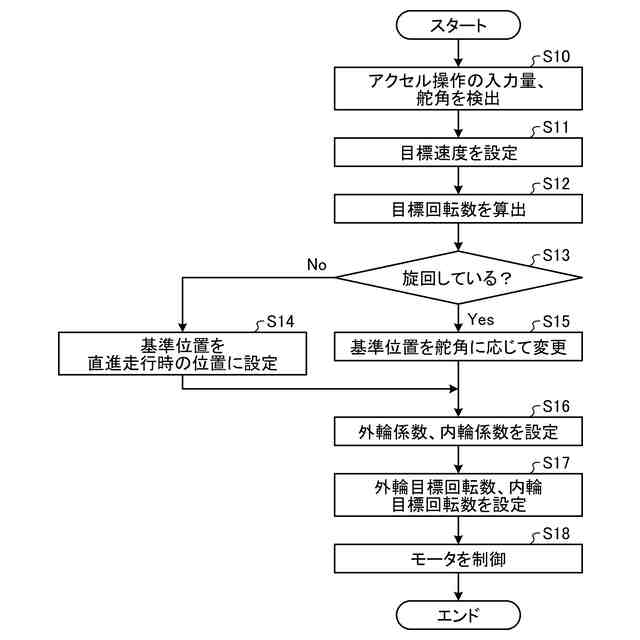
図4は、制御装置のコントローラが実行する処理手順を示すフローチャートである。
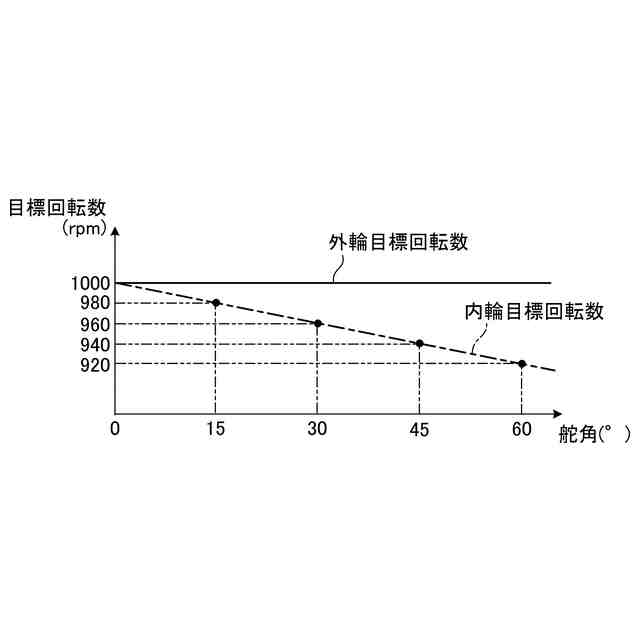
図5は、旋回走行時の外輪目標回転数および内輪目標回転数を説明するための図である。
図6は、第2実施形態に係る制御装置による制御方法を説明する図である。
図7は、第2実施形態に係る外輪係数および内輪係数などを説明する図である。
図8は、第2実施形態に係る外輪係数および内輪係数などを説明する図である。
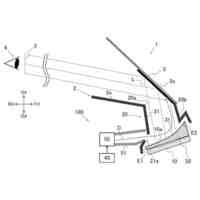
図9は、第3変形例に係る制御装置を説明するための図である。
【発明を実施するための形態】
【0010】
以下、添付図面を参照して、本願の開示する制御装置および制御方法の実施形態を詳細に説明する。なお、以下に示す実施形態によりこの発明が限定されるものではない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
飛行自動車
2か月前
個人
警告装置
24日前
個人
眼科手術車
4か月前
個人
授乳用車両
3か月前
個人
小型EVシステム
26日前
日本精機株式会社
ケース
1か月前
日本精機株式会社
表示装置
3か月前
個人
アンチロール制御装置
1か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
照明装置
1か月前
日本精機株式会社
表示装置
4か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
1か月前
井関農機株式会社
作業車両
3か月前
日本精機株式会社
表示装置
1か月前
株式会社松華
懸架装置
1か月前
個人
キャンピングトレーラー
4か月前
個人
台車用車輪止め具
4か月前
個人
ブレーキシステム
1か月前
個人
謝意シグナル装着車
4か月前
横浜ゴム株式会社
タイヤ
1か月前
個人
自動車ドア開度規制ベルト
25日前
個人
自走式立体型洗車場
1か月前
個人
ステージカー
1か月前
日本精機株式会社
車載表示装置
4か月前
マツダ株式会社
車両
2か月前
トヨタ自動車株式会社
車両
4か月前
日本精機株式会社
車両用表示装置
4か月前
日本精機株式会社
車両用表示装置
1か月前
マツダ株式会社
車両
2か月前
株式会社ユーシン
照明装置
8日前
マツダ株式会社
車両
3か月前
井関農機株式会社
作業車両
1か月前
日本精機株式会社
車両用表示装置
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ