TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025032687
公報種別
公開特許公報(A)
公開日
2025-03-12
出願番号
2023138109
出願日
2023-08-28
発明の名称
物体追跡装置および物体追跡プログラム
出願人
株式会社デンソー
,
トヨタ自動車株式会社
,
株式会社ミライズテクノロジーズ
代理人
弁理士法人ゆうあい特許事務所
主分類
G01S
13/74 20060101AFI20250305BHJP(測定;試験)
要約
【課題】物体追跡についての頑健性の低下を抑制する物体追跡装置および物体追跡プログラムを提供する。
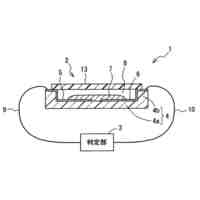
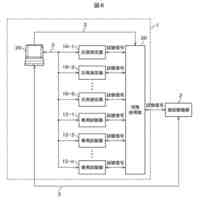
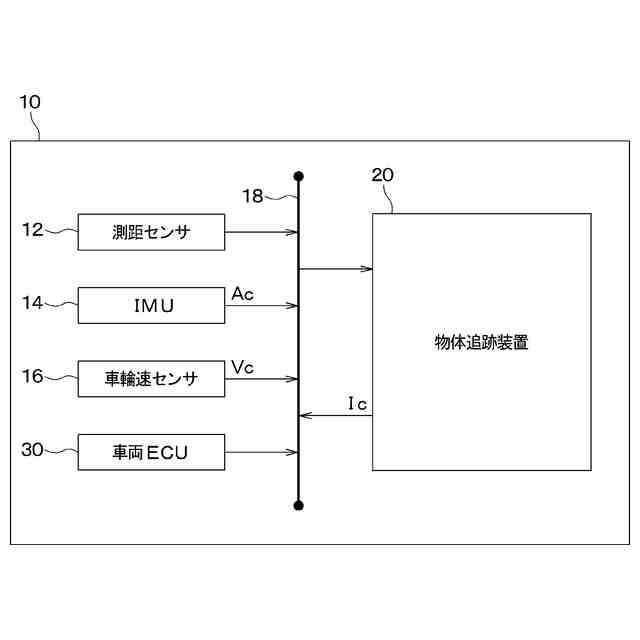
【解決手段】物体追跡装置20は、測距点についての位置および反射強度を予測し、測距点についての位置および反射強度と、予測測距点についての位置および反射強度とに基づいて、測距点と、予測測距点との対応付けを行い、互いに対応する測距点と予測測距点とに基づいて、予測測距点についての位置および反射強度を更新することにより、追跡対象物体を追跡する。また、物体追跡装置20は、更新した予測測距点についての位置および反射強度に基づいて、測距点についての位置および反射強度を予測する。
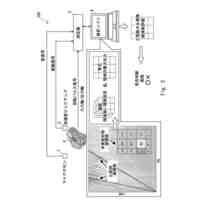
【選択図】図1
特許請求の範囲
【請求項1】
物体追跡装置であって、
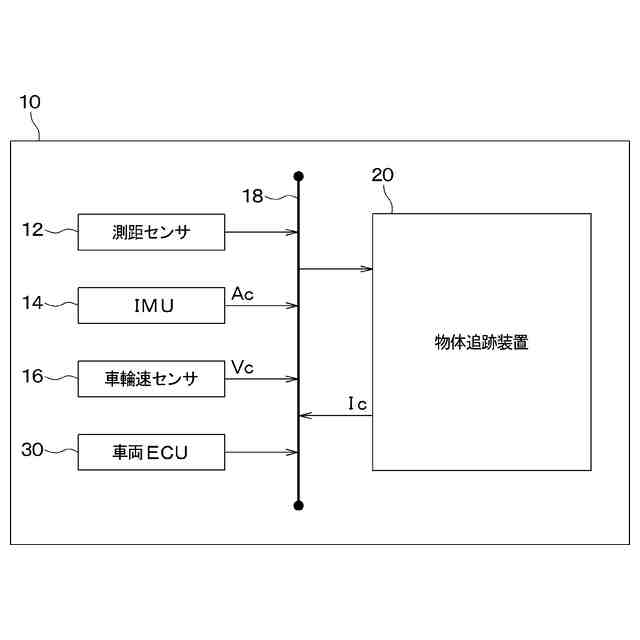
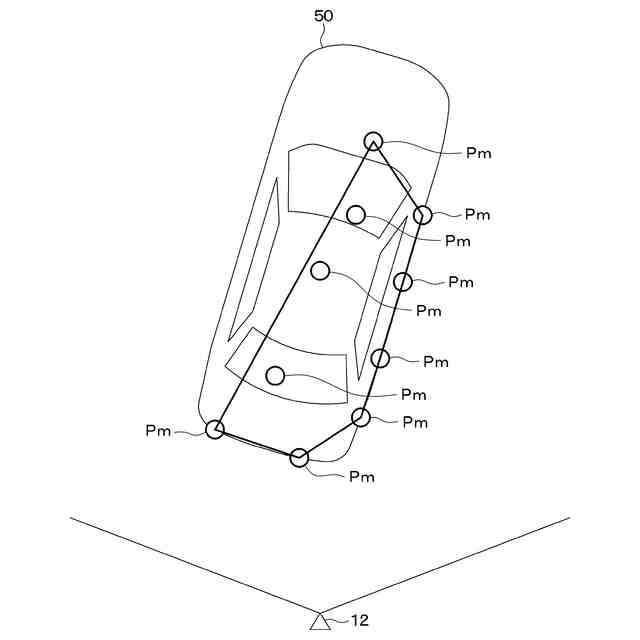
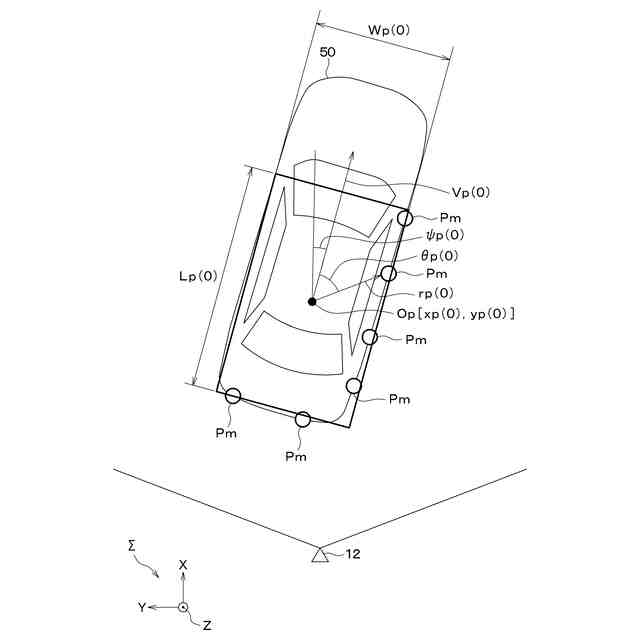
測距センサ(12)によって検出される測距点(Pm)の位置データおよび前記測距点にて反射される前記測距センサの探査波の反射強度に関するデータである反射データを取得する取得部(S100)と、
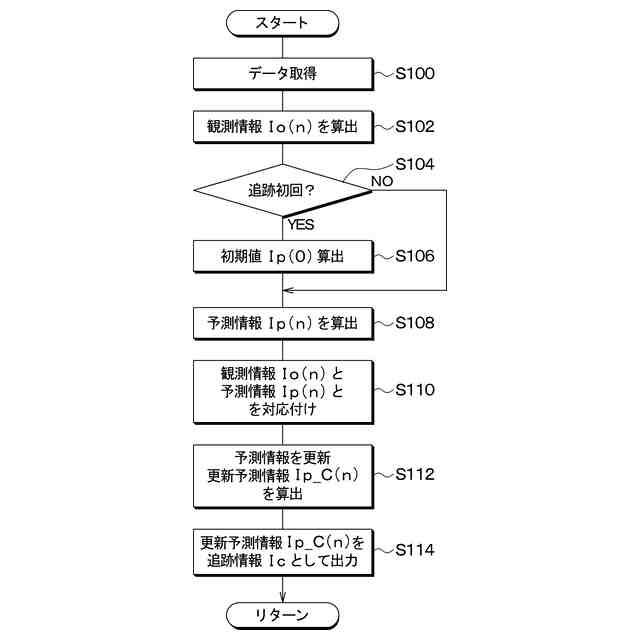
前記位置データおよび前記反射データに基づいて、追跡対象物体(50)の形状に関する値に寄与する前記測距点を抽出し、抽出した前記測距点についての位置および反射強度に関する値を算出する観測部(S102)と、
前記観測部によって抽出された前記測距点についての位置および反射強度に関する値を予測する予測部(S108)と、
前記観測部によって抽出された前記測距点についての位置および反射強度に関する値と、前記予測部によって予測された前記測距点である予測測距点(Pp)についての位置および反射強度に関する値とに基づいて、前記観測部によって抽出された前記測距点と、前記予測測距点との対応付けを行う対応算出部(S110)と、
互いに対応する前記観測部によって抽出された前記測距点と前記予測測距点とに基づいて、前記予測測距点についての位置および反射強度に関する値を更新することにより、前記追跡対象物体を追跡する更新部(S112)と、
を備え、
前記予測部は、前記更新部によって更新された前記予測測距点についての位置および反射強度に関する値に基づいて、前記観測部によって抽出された前記測距点についての位置および反射強度に関する値を予測する物体追跡装置。
続きを表示(約 1,900 文字)
【請求項2】
前記観測部は、前記位置データから前記測距点についての凸包を算出し、算出した凸包に基づいて、前記追跡対象物体の形状に関する値に寄与する前記測距点を抽出する請求項1に記載の物体追跡装置。
【請求項3】
前記予測部は、前記測距センサから前記予測測距点までの距離(Dp)に基づいて、前記予測測距点についての反射強度に関する値を予測する請求項1または2に記載の物体追跡装置。
【請求項4】
前記予測部は、前記測距センサおよび前記予測測距点を結ぶ線と前記予測測距点の接線とでなす角度(αp)に基づいて、前記予測測距点についての反射強度に関する値を予測する請求項1または2に記載の物体追跡装置。
【請求項5】
前記予測部は、前記追跡対象物体に関するヨー角(ψp)に基づいて、前記予測測距点についての反射強度に関する値を予測する請求項1または2に記載の物体追跡装置。
【請求項6】
前記対応算出部は、
前記観測部によって抽出された前記測距点についての位置および反射強度に関する値と、前記予測測距点についての位置および反射強度に関する値とに基づいて、前記予測測距点を、前記観測部によって抽出された前記測距点に近づけさせる補正をし、
補正した前記予測測距点と、前記観測部によって抽出された前記測距点との対応付けを行う請求項1または2に記載の物体追跡装置。
【請求項7】
前記更新部は、前記予測測距点についての反射強度に関する値が閾値よりも大きいときの回数が所定回数以上、連続するとき、前記予測測距点についての反射強度に関する値を更新する請求項1または2に記載の物体追跡装置。
【請求項8】
前記更新部は、前記測距センサおよび前記予測測距点を結ぶ線と前記予測測距点の接線とでなす角度(αp)がπ/2であるときの前記予測測距点を除いて、前記予測測距点についての位置および反射強度に関する値を更新する請求項1または2に記載の物体追跡装置。
【請求項9】
前記測距センサは、複数の波長を用いて前記測距点を検出し、
前記取得部は、前記複数の波長毎に、前記位置データおよび前記反射データを取得し、
前記観測部は、前記複数の波長毎に、前記追跡対象物体の形状に関する値に寄与する前記測距点を抽出し、抽出した前記測距点についての位置および反射強度に関する値を算出し、
前記予測部は、前記複数の波長毎に、前記観測部によって抽出された前記測距点についての位置および反射強度に関する値を予測し、
前記対応算出部は、前記複数の波長毎に、前記観測部によって抽出された前記測距点と、前記予測測距点との対応付けを行い、
前記更新部は、前記複数の波長毎に、前記予測測距点についての位置および反射強度に関する値を更新する請求項1または2に記載の物体追跡装置。
【請求項10】
物体追跡装置であって、
画像センサ(40)によって検出される測距点(Pm)の位置データおよび前記画像センサによって撮像される画像における前記測距点の輝度に関するデータである輝度データを取得する取得部(S100)と、
前記位置データ前記輝度データに基づいて、追跡対象物体(50)の形状に関する値に寄与する前記測距点を抽出し、抽出した前記測距点についての位置および輝度に関する値を算出する観測部(S102)と、
前記観測部によって抽出された前記測距点についての位置および輝度に関する値を予測する予測部(S108)と、
前記観測部によって抽出された前記測距点についての位置および輝度に関する値と、前記予測部によって予測された前記測距点である予測測距点(Pp)についての位置および輝度に関する値とに基づいて、前記観測部によって抽出された前記測距点と、前記予測測距点との対応付けを行う対応算出部(S110)と、
互いに対応する前記観測部によって抽出された前記測距点と前記予測測距点とに基づいて、前記予測測距点についての位置および輝度に関する値を更新することにより、前記追跡対象物体を追跡する更新部(S112)と、
を備え、
前記予測部は、前記更新部によって更新された前記予測測距点についての位置および輝度に関する値に基づいて、前記観測部によって抽出された前記測距点についての位置および輝度に関する値を予測する物体追跡装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、物体追跡装置および物体追跡プログラムに関するものである。
続きを表示(約 3,600 文字)
【背景技術】
【0002】
従来、非特許文献1に記載されているように、反射強度情報および幾何情報を用いて点群の対応付けをするアルゴリズムが知られている。
【先行技術文献】
【非特許文献】
【0003】
J.Park,Q.-Y.Zhou and V.Koltun,"Colored Point Cloud Registration Revisited," 2017 IEEE International Conference on Computer Vision (ICCV),Venice,Italy,2017,pp.143-152,doi:10.1109/ICCV.2017.25.
【発明の概要】
【発明が解決しようとする課題】
【0004】
非特許文献1のアルゴリズムでは、瞬時の反射強度情報および幾何情報が用いられるため、反射強度情報および幾何情報のバラつき、および、光の遮蔽等によって生じる反射強度のバラつき等のノイズにより、点群の対応付けの精度が低下する。したがって、非特許文献1のアルゴリズムでは、点群の対応付けの頑健性が低い。このため、非特許文献1のアルゴリズムを物体追跡に対して単純に用いることはできない。
【0005】
本開示は、物体追跡についての頑健性の低下を抑制する物体追跡装置および物体追跡プログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
請求項1に記載の発明は、物体追跡装置であって、測距センサ(12)によって検出される測距点(Pm)の位置データおよび測距点にて反射される測距センサの探査波の反射強度に関するデータである反射データを取得する取得部(S100)と、位置データおよび反射データに基づいて、追跡対象物体(50)の形状に関する値に寄与する測距点を抽出し、抽出した測距点についての位置および反射強度に関する値を算出する観測部(S102)と、観測部によって抽出された測距点についての位置および反射強度に関する値を予測する予測部(S108)と、観測部によって抽出された測距点についての位置および反射強度に関する値と、予測部によって予測された測距点である予測測距点(Pp)についての位置および反射強度に関する値とに基づいて、観測部によって抽出された測距点と、予測測距点との対応付けを行う対応算出部(S110)と、互いに対応する観測部によって抽出された測距点と予測測距点とに基づいて、予測測距点についての位置および反射強度に関する値を更新することにより、追跡対象物体を追跡する更新部(S112)と、を備え、予測部は、更新部によって更新された予測測距点についての位置および反射強度に関する値に基づいて、観測部によって抽出された測距点についての位置および反射強度に関する値を予測する物体追跡装置である。
【0007】
また、請求項10に記載の発明は、物体追跡装置であって、画像センサ(40)によって検出される測距点(Pm)の位置データおよび画像センサによって撮像される画像における測距点の輝度に関するデータである輝度データを取得する取得部(S100)と、位置データ輝度データに基づいて、追跡対象物体(50)の形状に関する値に寄与する測距点を抽出し、抽出した測距点についての位置および輝度に関する値を算出する観測部(S102)と、観測部によって抽出された測距点についての位置および輝度に関する値を予測する予測部(S108)と、観測部によって抽出された測距点についての位置および輝度に関する値と、予測部によって予測された測距点である予測測距点(Pp)についての位置および輝度に関する値とに基づいて、観測部によって抽出された測距点と、予測測距点との対応付けを行う対応算出部(S110)と、互いに対応する観測部によって抽出された測距点と予測測距点とに基づいて、予測測距点についての位置および輝度に関する値を更新することにより、追跡対象物体を追跡する更新部(S112)と、を備え、予測部は、更新部によって更新された予測測距点についての位置および輝度に関する値に基づいて、観測部によって抽出された測距点についての位置および輝度に関する値を予測する物体追跡装置である。
【0008】
さらに、請求項11に記載の発明は、物体追跡装置であって、測距センサ(12)によって検出される測距点(Pm)の位置データおよび測距点についてのドップラー速度に関するデータである速度データを取得する取得部(S100)と、位置データ速度データに基づいて、追跡対象物体(50)の形状に関する値に寄与する測距点を抽出し、抽出した測距点についての位置およびドップラー速度に関する値を算出する観測部(S102)と、観測部によって抽出された測距点についての位置およびドップラー速度に関する値を予測する予測部(S108)と、観測部によって抽出された測距点についての位置およびドップラー速度に関する値と、予測部によって予測された測距点である予測測距点(Pp)についての位置およびドップラー速度に関する値とに基づいて、観測部によって抽出された測距点と、予測測距点との対応付けを行う対応算出部(S110)と、互いに対応する観測部によって抽出された測距点と予測測距点とに基づいて、予測測距点についての位置およびドップラー速度に関する値を更新することにより、追跡対象物体を追跡する更新部(S112)と、を備え、予測部は、更新部によって更新された予測測距点についての位置およびドップラー速度に関する値に基づいて、観測部によって抽出された測距点についての位置およびドップラー速度に関する値を予測する物体追跡装置である。
【0009】
また、請求項12に記載の発明は、物体追跡プログラムであって、物体追跡装置を、測距センサ(12)によって検出される測距点(Pm)の位置データおよび測距点にて反射される測距センサの探査波の反射強度に関するデータである反射データを取得する取得部(S100)、位置データおよび反射データに基づいて、追跡対象物体(50)の形状に関する値に寄与する測距点を抽出し、抽出した測距点についての位置および反射強度に関する値を算出する観測部(S102)、観測部によって抽出された測距点についての位置および反射強度に関する値を予測する予測部(S108)、観測部によって抽出された測距点についての位置および反射強度に関する値と、予測部によって予測された測距点である予測測距点(Pp)についての位置および反射強度に関する値とに基づいて、観測部によって抽出された測距点と、予測測距点との対応付けを行う対応算出部(S110)、および、互いに対応する観測部によって抽出された測距点と予測測距点とに基づいて、予測測距点についての位置および反射強度に関する値を更新することにより、追跡対象物体を追跡する更新部(S112)として機能させ、予測部は、更新部によって更新された予測測距点についての位置および反射強度に関する値に基づいて、観測部によって抽出された測距点についての位置および反射強度に関する値を予測する物体追跡プログラムである。
【0010】
さらに、請求項13に記載の発明は、物体追跡プログラムであって、物体追跡装置を、画像センサ(40)によって検出される測距点(Pm)の位置データおよび画像センサによって撮像される画像における測距点の輝度に関するデータである輝度データを取得する取得部(S100)、位置データ輝度データに基づいて、追跡対象物体(50)の形状に関する値に寄与する測距点を抽出し、抽出した測距点についての位置および輝度に関する値を算出する観測部(S102)、観測部によって抽出された測距点についての位置および輝度に関する値を予測する予測部(S108)、観測部によって抽出された測距点についての位置および輝度に関する値と、予測部によって予測された測距点である予測測距点(Pp)についての位置および輝度に関する値とに基づいて、観測部によって抽出された測距点と、予測測距点との対応付けを行う対応算出部(S110)、および、互いに対応する観測部によって抽出された測距点と予測測距点とに基づいて、予測測距点についての位置および輝度に関する値を更新することにより、追跡対象物体を追跡する更新部(S112)として機能させ、予測部は、更新部によって更新された予測測距点についての位置および輝度に関する値に基づいて、観測部によって抽出された測距点についての位置および輝度に関する値を予測する物体追跡プログラムである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社大真空
センサ
12日前
アズビル株式会社
圧力センサ
5日前
株式会社ミツトヨ
エンコーダ
6日前
日本精機株式会社
基板及び表示装置
今日
日本碍子株式会社
ガスセンサ
5日前
学校法人同志社
測位システム
今日
日本FC企画株式会社
特性試験装置
8日前
株式会社小野測器
回転計測装置
19日前
株式会社ミツトヨ
変位測定装置
19日前
株式会社東芝
センサ
19日前
株式会社東芝
センサ
5日前
アズビル株式会社
検査用プローブ
13日前
エスペック株式会社
環境試験装置
5日前
積水ハウス株式会社
測定治具
5日前
古河電気工業株式会社
漏水検知構造
6日前
株式会社ノーリツ
温度センサ取付具
6日前
株式会社ノーリツ
温度センサ取付具
6日前
トヨタ自動車株式会社
異音解析方法
19日前
個人
レーザージャイロ応用重力場計測装置
7日前
トヨタ自動車株式会社
NVH解析装置
19日前
一丸ファルコス株式会社
コラーゲンの検出方法
今日
日鉄テクノロジー株式会社
衝突試験装置
9日前
アズビル株式会社
距離設定形光電センサ
今日
中国電力株式会社
位置推定システム
5日前
ヒロセ電機株式会社
磁気センサ装置
12日前
トヨタ自動車株式会社
故障兆候の検出方法
今日
株式会社国際電気
試験装置
5日前
トヨタ自動車株式会社
レーダ取付構造
19日前
株式会社トプコン
撮像装置及び測量システム
5日前
株式会社トプコン
撮像装置及び測量システム
5日前
矢崎総業株式会社
情報処理装置
今日
株式会社日立ハイテクサイエンス
熱分析装置
13日前
トヨタ自動車株式会社
方法
19日前
マクセル株式会社
電気化学式酸素センサ
5日前
株式会社ミツトヨ
画像測定機およびプログラム
今日
内山工業株式会社
分析装置用部材
19日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ