TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025033690
公報種別
公開特許公報(A)
公開日
2025-03-13
出願番号
2023139589
出願日
2023-08-30
発明の名称
回転角度検出装置
出願人
株式会社デンソー
代理人
弁理士法人服部国際特許事務所
主分類
G01D
5/245 20060101AFI20250306BHJP(測定;試験)
要約
【課題】精度よく角度検出可能な回転角度検出装置を提供する。
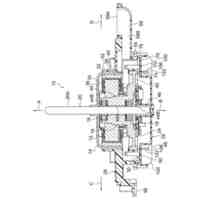
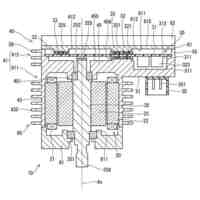
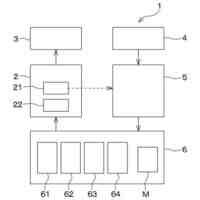
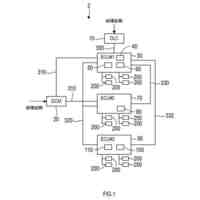
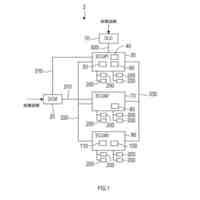
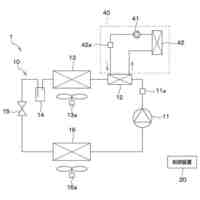
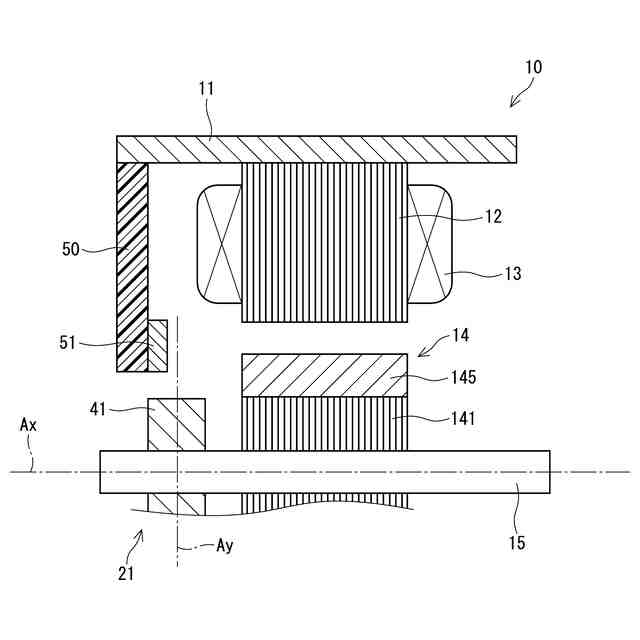
【解決手段】回転角度検出装置21は、センサマグネット41と、センサ部51と、を備える。センサマグネット41は、ロータ14と一体に回転するシャフト15の径方向外側に固定されている。センサ部51は、センサマグネット41の磁界を検出可能な検出素子511、512を有する。センサ部51は、シャフト15の径方向外側、かつ、センサマグネット41の軸方向における中心線Ayからずれた位置に設けられ、センサマグネット41の主磁束成分とは異なる2方向の磁束を検出可能である。
【選択図】 図1
特許請求の範囲
【請求項1】
ロータ(14)と一体に回転するシャフト(15)の径方向外側に固定されているセンサマグネット(41~46)と、
前記センサマグネットの磁界を検出可能な検出素子(511、512、521、522)を有するセンサ部(51~54)と、
を備え、
前記センサ部は、前記シャフトの径方向外側、かつ、前記センサマグネットの軸方向における中心線からずれた位置に設けられ、前記センサマグネットの主磁束成分とは異なる2方向の磁束を検出する回転角度検出装置。
続きを表示(約 450 文字)
【請求項2】
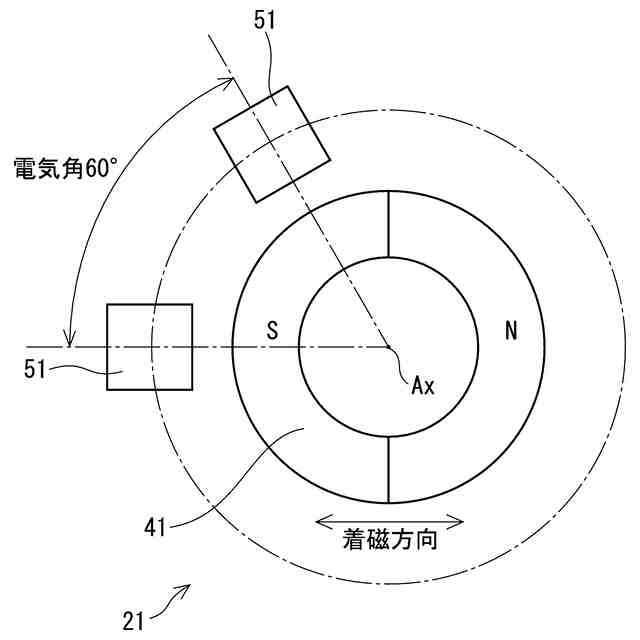
前記センサマグネットは、径方向に平行に着磁されている請求項1に記載の回転角度検出装置。
【請求項3】
前記センサ部は、検出する2方向の磁束密度の振幅が等しくなる箇所に配置される請求項1または2に記載の回転角度検出装置。
【請求項4】
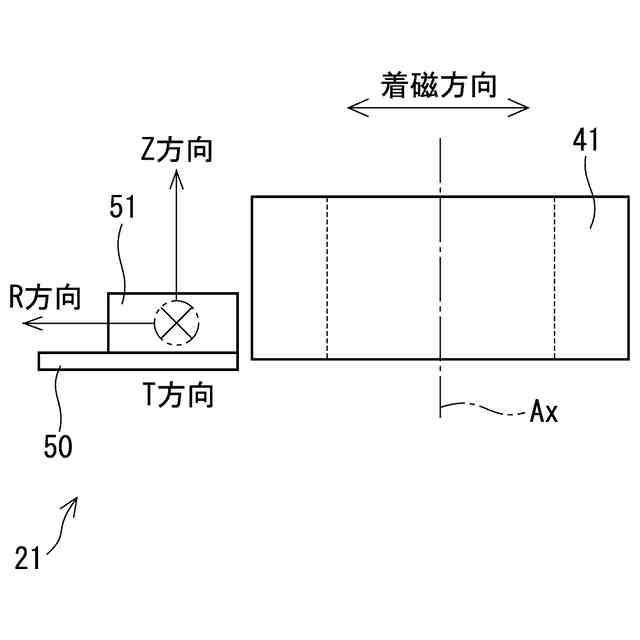
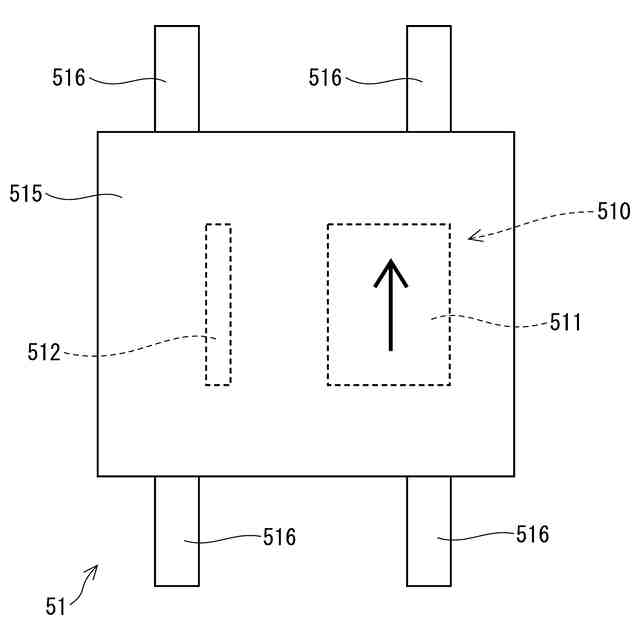
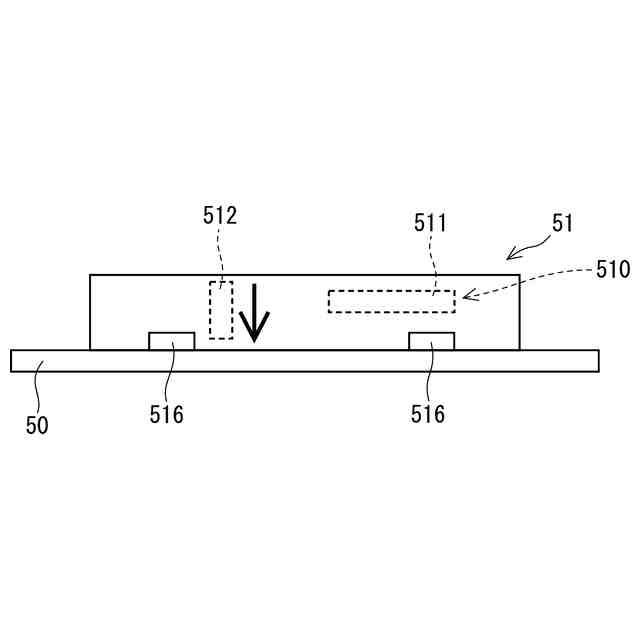
前記センサ部は、異なる方向の磁束を検出する2つの前記検出素子からなる素子対(510)が封止部(515)により封止され、前記シャフトの軸線に直交する仮想平面上に設けられている基板(50)に実装されており、
前記素子対の一方の前記検出素子(511)の検出面は、前記基板の実装面に平行に設けられており、他方の前記検出素子(512)の検出面は、前記基板の実装面に垂直に設けられている請求項1に記載の回転角度検出装置。
【請求項5】
前記センサ部は、複数設けられており、前記シャフトの軸線を中心とする同心円上であって、電気角60°または120°の間隔で配置されている請求項1に記載の回転角度検出装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、回転角度検出装置に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
従来、回転子の回転に伴う磁束の変化を検出することで回転角度を検出する回転角度検出装置が知られている。例えば特許文献1では、径方向用ホールセンサが受ける磁束密度成分の振幅と周方向用ホールセンサが受ける磁束密度成分の振幅とが同じになるように、径方向用ホールセンサおよび周方向用ホールセンサが配置されている。
【先行技術文献】
【特許文献】
【0003】
特開2009-276261号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
センサマグネットの着磁方向の磁束密度は、他の方向の磁束密度よりも大きいため、特許文献1のように配置を工夫するだけでは磁束密度成分の振幅差を減らしきれず、高い取付精度が要求される。
【0005】
本発明は、上述の課題に鑑みてなされたものであり、その目的は、精度よく角度検出可能な回転角度検出装置を提供することにある。
【課題を解決するための手段】
【0006】
本発明の回転角度検出装置は、センサマグネット(41~46)と、センサ部(51~54)と、を備える。センサマグネットは、ロータ(14)と一体に回転するシャフト(15)の径方向外側に固定されている。センサ部は、センサマグネットの磁界を検出可能な検出素子(511、512、521、522)を有する。
【0007】
センサ部は、シャフトの径方向外側、かつ、センサマグネットの軸方向における中心線からずれた位置に設けられ、センサマグネットの主磁束成分とは異なる2方向の磁束を検出する。これにより、精度よく角度検出を行うことができる。
【図面の簡単な説明】
【0008】
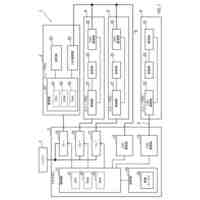
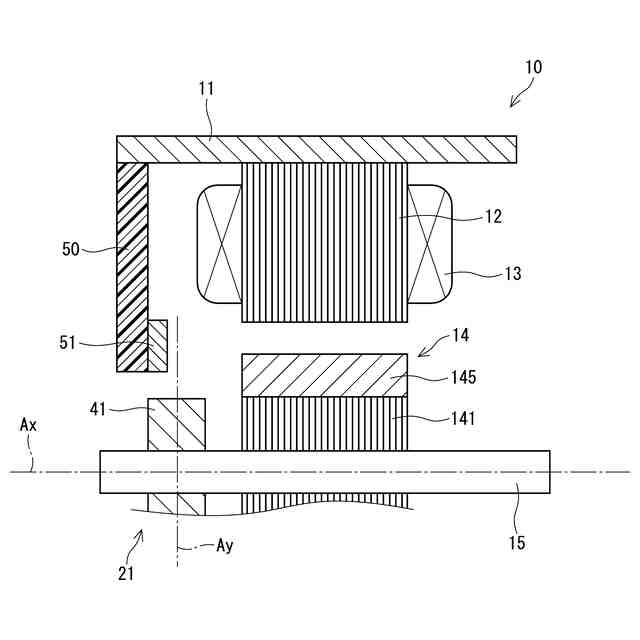
第1実施形態によるモータを示す断面図である。
第1実施形態による回転角度検出装置を示す平面図である。
第1実施形態による回転角度検出装置を示す平面図である。
第1実施形態による回転角度検出装置の側面図である。
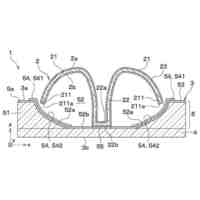
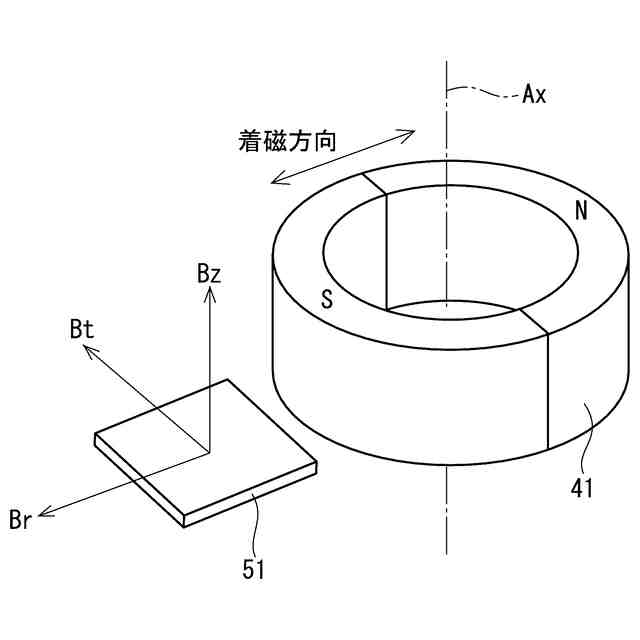
第1実施形態によるセンサマグネットとセンサ部との配置を示す斜視図である。
第1実施形態によるセンサ部の平面図である。
第1実施形態によるセンサ部の側面図である。
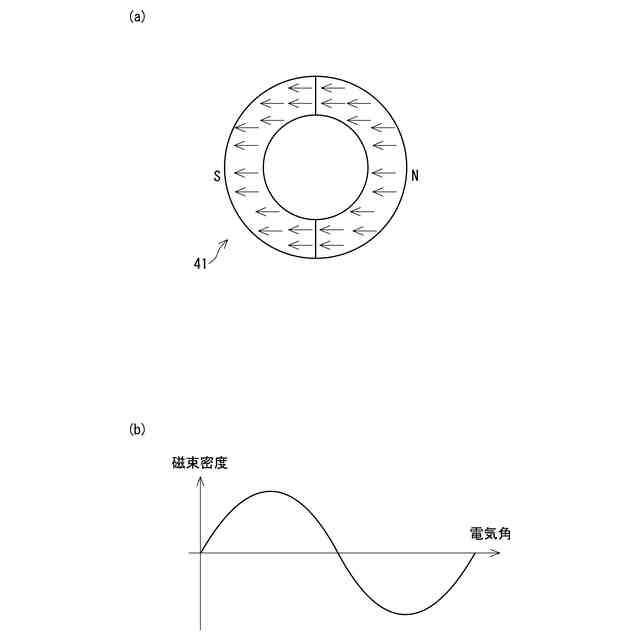
(a)は第1実施形態によるセンサマグネットの着磁を示す図であり、(b)は磁束密度を説明する図である。
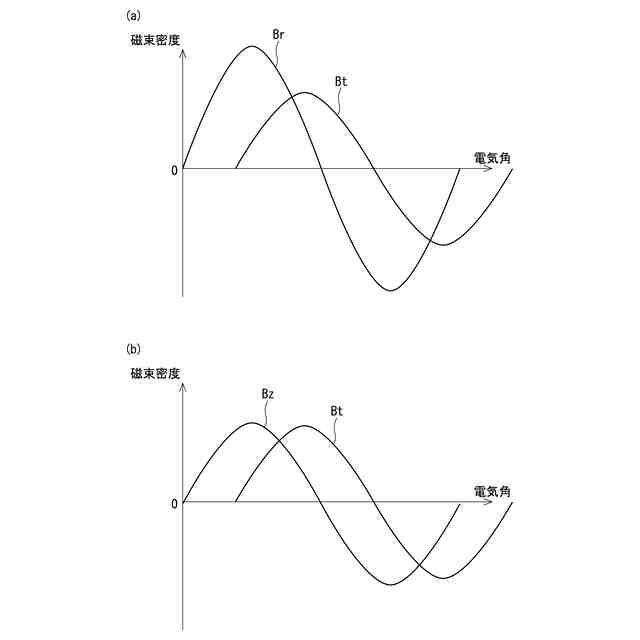
(a)は径方向および接線方向の磁束密度を示す図であって、(b)は軸方向および接線方向の磁束密度を示す図である。
センサ部の軸方向位置を説明する図である。
(a)は位置C3にセンサ部を配置した場合の磁束密度を示す図であり、(b)は位置C2にセンサ部を配置した場合の磁束密度を示す図である。
(a)は同一平面上にセンサ部を配置した場合の側面図であり、(b)は異なる平面にセンサ部を配置した場合の側面図である。
(a)は第2実施形態によるセンサマグネットの着磁を示す図であり、(b)は磁束密度を説明する図である。
(a)は第3実施形態によるセンサマグネットの着磁を示す図であり、(b)は磁束密度を説明する図である。
第4実施形態による回転角度検出装置を示す平面図である。
第5実施形態による回転角度検出装置を示す平面図である。
(a)は第5実施形態によるセンサマグネットの着磁を示す図であり、(b)は磁束密度を説明する図である。
第6実施形態による回転角度検出装置を示す平面図である。
第7実施形態による回転角度検出装置を示す平面図である。
第7実施形態による回転角度検出装置を示す側面図である。
第7実施形態によるセンサ部の平面図である。
第7実施形態によるセンサ部の側面図である。
第8実施形態による回転角度検出装置を示す平面図である。
第8実施形態による回転角度検出装置を示す側面図である。
第9実施形態による回転角度検出装置を示す平面図である。
第10実施形態による回転角度検出装置を示す平面図である。
第10実施形態による回転角度検出装置を示す側面図である。
他の実施形態による回転角度検出装置を示す側面図である。
他の実施形態による回転角度検出装置を示す平面図である。
他の実施形態による回転角度検出装置を示す平面図である。
【発明を実施するための形態】
【0009】
以下、本発明による回転角度検出装置を図面に基づいて説明する。以下、複数の実施形態において、実質的に同一の構成には同一の符号を付して説明を省略する。
【0010】
(第1実施形態)
第1実施形態を図1~図12に示す。図1に示すように、回転角度検出装置21は、モータ10の回転角度を検出する。モータ10は、モータケース11、ステータ12、巻線13、ロータ14、および、シャフト15を備える。モータケース11は筒状に形成される。ステータ12は、例えば積層鉄板により形成され、モータケース11の径方向内側に固定されている。巻線13は、ステータ12に巻回されている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソーエレクトロニクス
筐体
17日前
株式会社デンソー
モータ
1か月前
株式会社デンソー
演算装置
16日前
株式会社デンソー
試験装置
26日前
株式会社デンソー
電池装置
24日前
株式会社デンソー
診断装置
16日前
株式会社デンソー
回転電機
1か月前
株式会社デンソー
駆動装置
9日前
株式会社デンソー
慣性センサ
23日前
株式会社デンソー
レーダ装置
17日前
株式会社デンソー
半導体装置
16日前
株式会社デンソー
レーダ装置
17日前
株式会社デンソー
レーダ装置
23日前
株式会社デンソー
レーダ装置
24日前
株式会社デンソー
レーダ装置
24日前
株式会社デンソー
半導体装置
26日前
株式会社デンソー
レーダ装置
1か月前
株式会社デンソー
半導体装置
8日前
株式会社デンソーウェーブ
タグ通信装置
16日前
株式会社デンソー
通信システム
1か月前
株式会社デンソーウェーブ
タグ通信装置
1か月前
株式会社デンソー
通信システム
1か月前
株式会社デンソー
通信システム
1か月前
株式会社デンソー
電力変換装置
9日前
株式会社デンソー
電子制御装置
2日前
株式会社デンソーテン
スピーカ装置
2日前
株式会社デンソー
車載用冷凍装置
10日前
株式会社デンソー
熱交換システム
12日前
株式会社デンソー
回転角度検出装置
24日前
株式会社デンソー
路面摩擦推定装置
1か月前
株式会社デンソーウェーブ
光学情報読取装置
16日前
株式会社デンソー
スイッチング素子
8日前
株式会社デンソーテン
スロットアンテナ
25日前
株式会社デンソーウェーブ
ロボットシステム
1か月前
株式会社デンソーウェーブ
データ配信システム
1か月前
株式会社デンソーウェーブ
歪ゲージの取付方法
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ