TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025032690
公報種別
公開特許公報(A)
公開日
2025-03-12
出願番号
2023138114
出願日
2023-08-28
発明の名称
物体検知装置および物体検知プログラム
出願人
株式会社デンソー
代理人
弁理士法人ゆうあい特許事務所
主分類
G01S
15/931 20200101AFI20250305BHJP(測定;試験)
要約
【課題】車両に搭載された超音波センサを用いて物体を検知する物体検知装置および物体検知プログラムにおいて、良好な物体検知を実現するために、凍結判定をよりいっそう良好に行うこと。
【解決手段】物体検知装置(6)は、車両(V)に搭載された超音波センサ(5)を用いて物体を検知する装置である。かかる物体検知装置は、凍結判定部を備えている。凍結判定部は、所定の凍結判定条件が成立した場合に、超音波センサが凍結状態であると判定する。凍結判定条件は、同一の車体部品(V3)に装着された2つの超音波センサである第一超音波センサ(5a)と第二超音波センサ(5b)とのうちの一方から送信された超音波が他方に受信される間接波における送信時刻と受信時刻との間の経過時間である間接波行程時間が間接波判定閾値時間以下である間接波近接検知が成立することを含む。
【選択図】図1
特許請求の範囲
【請求項1】
車両(V)に搭載された超音波センサ(5)を用いて物体を検知する、物体検知装置(6)であって、
所定の凍結判定条件が成立した場合に、前記超音波センサが凍結状態であると判定する、凍結判定部(64)を備え、
前記凍結判定条件は、同一の車体部品(V3)に装着された2つの前記超音波センサである第一超音波センサ(5a)と第二超音波センサ(5b)とのうちの一方から送信された超音波が他方に受信される間接波における送信時刻と受信時刻との間の経過時間である間接波行程時間が間接波判定閾値時間以下である間接波近接検知が成立することを含む、
物体検知装置。
続きを表示(約 1,200 文字)
【請求項2】
前記凍結判定条件は、前記間接波近接検知の成立が所定時間または所定回数継続することを含む、
請求項1に記載の物体検知装置。
【請求項3】
前記凍結判定条件は、前記第一超音波センサから送信された超音波が前記第二超音波センサに受信される前記間接波と、前記第二超音波センサから送信された超音波が前記第一超音波センサに受信される前記間接波との双方にて、前記間接波近接検知が成立することを含む、
請求項1に記載の物体検知装置。
【請求項4】
前記間接波判定閾値時間は、前記第一超音波センサと前記第二超音波センサとの間の距離を、0℃における音速で除した値以下に設定された、
請求項1に記載の物体検知装置。
【請求項5】
前記凍結判定条件は、前記間接波近接検知が成立し、且つ、外気温が閾値温度以下であることを含む、
請求項1に記載の物体検知装置。
【請求項6】
前記凍結判定条件は、前記間接波近接検知が成立し、且つ、前記第一超音波センサから送信された超音波が前記第一超音波センサに受信される直接波における送信時刻と受信時刻との間の経過時間である直接波行程時間が直接波判定閾値時間以下である直接波近接検知が成立することを含む、
請求項1に記載の物体検知装置。
【請求項7】
前記車体部品は金属製のバンパである、
請求項1に記載の物体検知装置。
【請求項8】
前記凍結判定部は、前記間接波近接検知が不成立、且つ、前記第一超音波センサから送信された超音波が前記第一超音波センサに受信される直接波における送信時刻と受信時刻との間の経過時間である直接波行程時間が直接波判定閾値時間以下である直接波近接検知が不成立の場合に、前記超音波センサが凍結状態であるとの判定を解除する、
請求項1に記載の物体検知装置。
【請求項9】
車両(V)に搭載された超音波センサ(5)を用いて物体を検知する物体検知装置(6)により実行される、物体検知プログラムであって、
前記物体検知装置により実行される処理は、所定の凍結判定条件が成立した場合に、前記超音波センサが凍結状態であると判定する、凍結判定処理を含み、
前記凍結判定条件は、同一の車体部品(V3)に装着された2つの前記超音波センサである第一超音波センサ(5a)と第二超音波センサ(5b)とのうちの一方から送信された超音波が他方に受信される間接波における送信時刻と受信時刻との間の経過時間である間接波行程時間が間接波判定閾値時間以下である間接波近接検知が成立することを含む、
物体検知プログラム。
【請求項10】
前記凍結判定条件は、前記間接波近接検知の成立が所定時間または所定回数継続することを含む、
請求項9に記載の物体検知プログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両に搭載された超音波センサを用いて物体を検知する物体検知装置、および、かかる物体検知装置により実行される物体検知プログラムに関するものである。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
超音波センサを用いて車両の周囲の物体を検知して乗員に対する警告や運転支援等の車両制御を行う装置が知られている。この種の装置において、超音波センサの表面に雪や氷等の異物が固着すると、物体検知に不具合が生じ得る。そこで、固着状態の発生を検知したり、固着状態に起因した物体の誤検知や当該誤検知による車両制御への支障を低減したりするための種々の提案がなされている。
【0003】
例えば、特許文献1に記載の運転支援装置は、超音波センサからの物体情報に基づいて、所定基準以上の時間連続性で物体が検出されていると判断した場合に、かかる物体を検出対象の障害物と確定し、この障害物に関する運転支援を開始する。ここで、かかる運転支援装置は、超音波センサからの物体情報に基づく物体までの距離が所定距離以下であり且つ積雪環境を検出した場合に、所定基準以上の時間連続性の判断基準を、物体を検出対象の障害物と確定し難くなる方向に変更する。これにより、超音波センサへの雪の固着に起因した運転支援の支障を低減することができる。具体的には、超音波センサにより検出されている物体が検出対象の障害物と確定されるまでの時間を長くすること(すなわち遅らせること)ができる。これにより、超音波センサに雪が固着している可能性が考えられる場合に、より慎重な障害物判定が実現されることになり、運転支援の信頼性を高めることができる。
【先行技術文献】
【特許文献】
【0004】
特開2014-89073号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記事情から明らかなように、この種の装置において、良好な物体検知を実現するために、凍結判定をよりいっそう良好に行うことが求められている。本発明は、上記に例示した事情等に鑑みてなされたものである。
【課題を解決するための手段】
【0006】
請求項1に記載の物体検知装置(6)は、車両(V)に搭載された超音波センサ(5)を用いて物体を検知する装置であって、
所定の凍結判定条件が成立した場合に、前記超音波センサが凍結状態であると判定する、凍結判定部(64)を備え、
前記凍結判定条件は、同一の車体部品(V3)に装着された2つの前記超音波センサである第一超音波センサ(5a)と第二超音波センサ(5b)とのうちの一方から送信された超音波が他方に受信される間接波における送信時刻と受信時刻との間の経過時間である間接波行程時間が間接波判定閾値時間以下である間接波近接検知が成立することを含む。
請求項9に記載の物体検知プログラムは、車両(V)に搭載された超音波センサ(5)を用いて物体を検知する物体検知装置(6)により実行されるコンピュータプログラムであって、
前記物体検知装置により実行される処理は、所定の凍結判定条件が成立した場合に、前記超音波センサが凍結状態であると判定する、凍結判定処理を含み、
前記凍結判定条件は、同一の車体部品(V3)に装着された2つの前記超音波センサである第一超音波センサ(5a)と第二超音波センサ(5b)とのうちの一方から送信された超音波が他方に受信される間接波における送信時刻と受信時刻との間の経過時間である間接波行程時間が間接波判定閾値時間以下である間接波近接検知が成立することを含む。
【0007】
なお、出願書類中の各欄において、各要素に括弧付きの参照符号が付されている場合がある。この場合、参照符号は、単に、同要素と後述する実施形態に記載の具体的構成との対応関係の一例を示すものであるにすぎない。よって、本発明は、参照符号の記載によって、何ら限定されるものではない。
【図面の簡単な説明】
【0008】
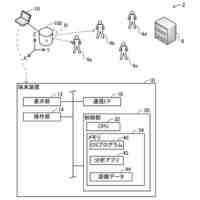
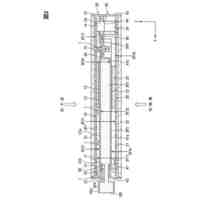
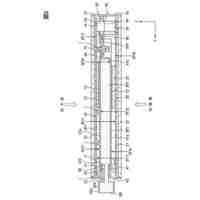
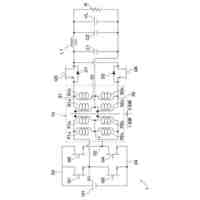
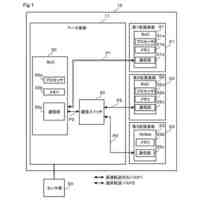
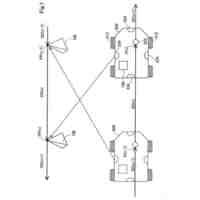
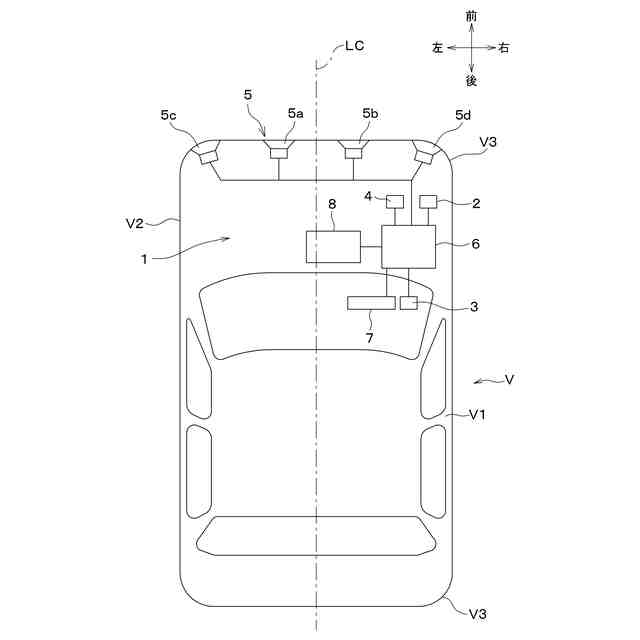
本発明の一実施形態に係る物体検知装置を搭載した車両の全体構成を示す概略図である。
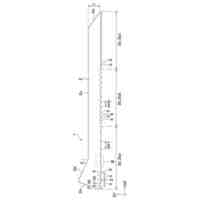
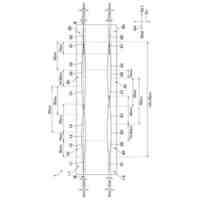
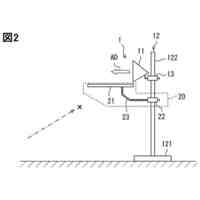
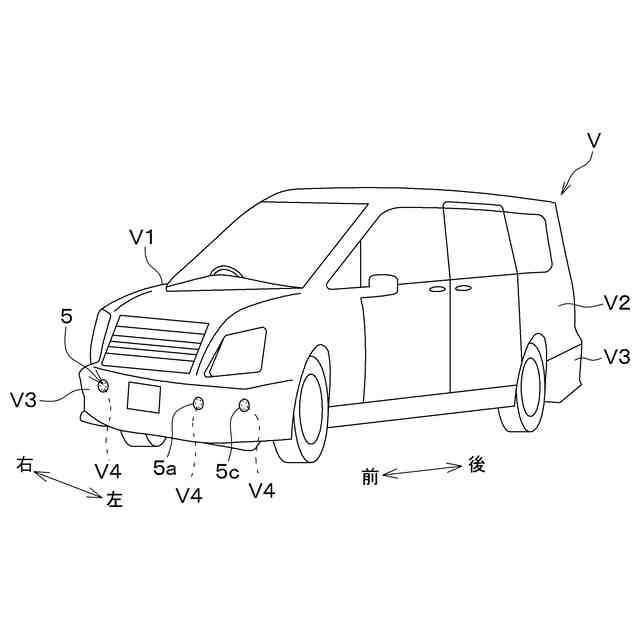
図1に示された車両の外観を示す斜視図である。
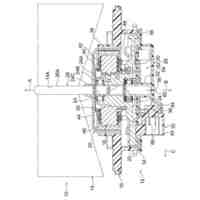
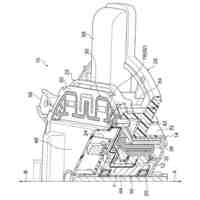
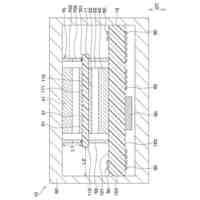
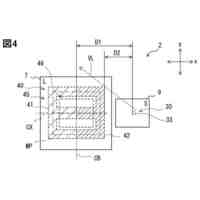
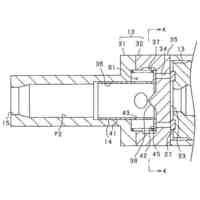
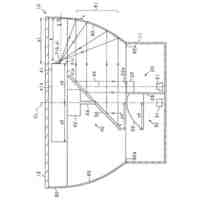
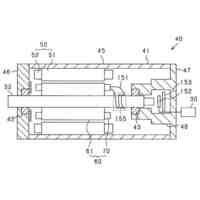
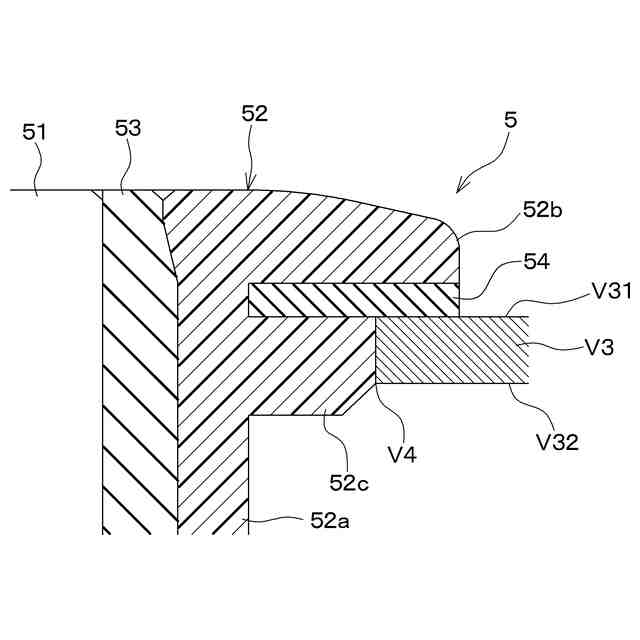
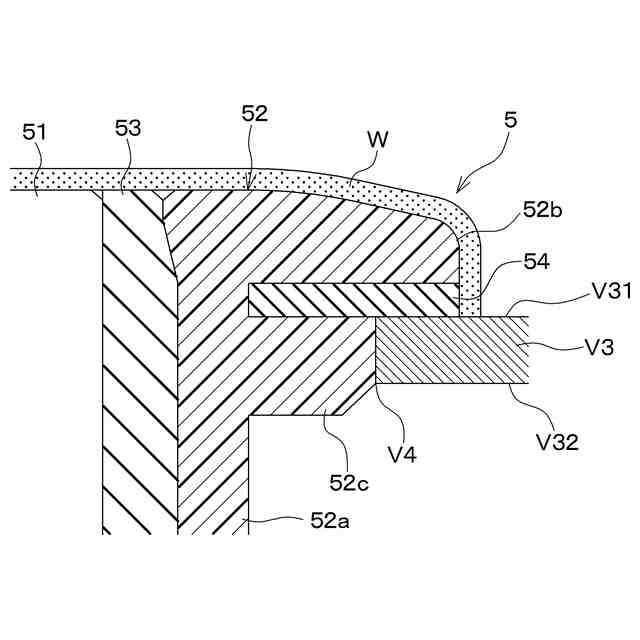
図2に示された超音波センサの車体に対する取り付け構造の概要を示す拡大断面図である。
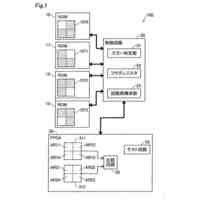
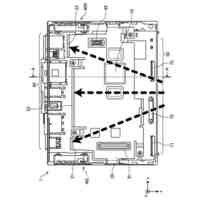
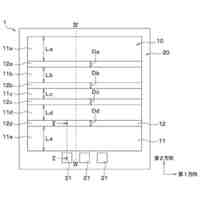
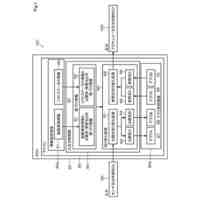
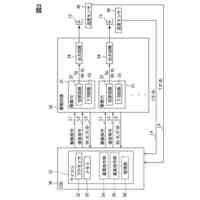
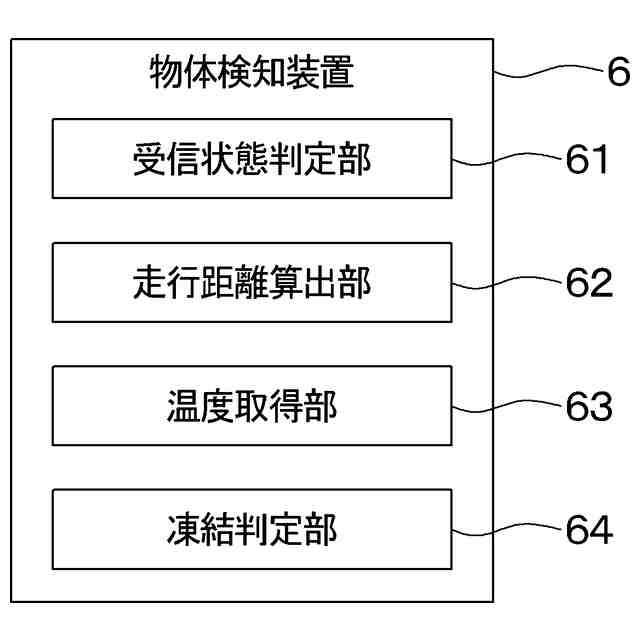
図1に示された物体検知装置における機能構成の概略を示すブロック図である。
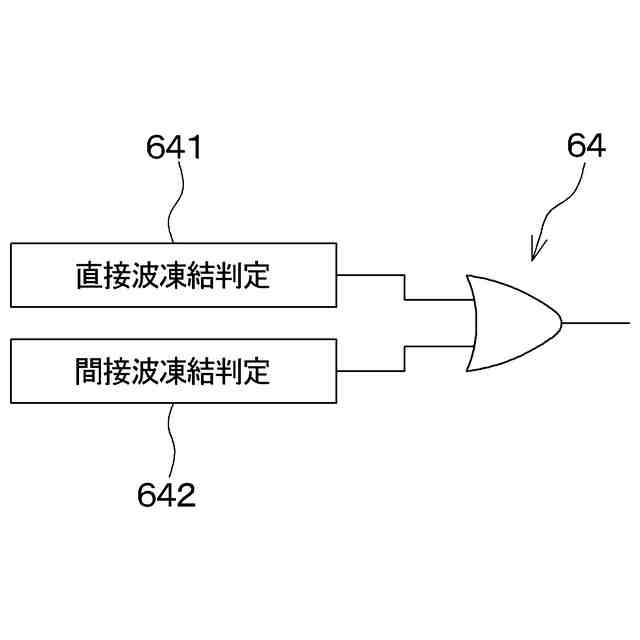
図4に示された凍結判定部のロジック構成の一例を概略的に示すブロック図である。
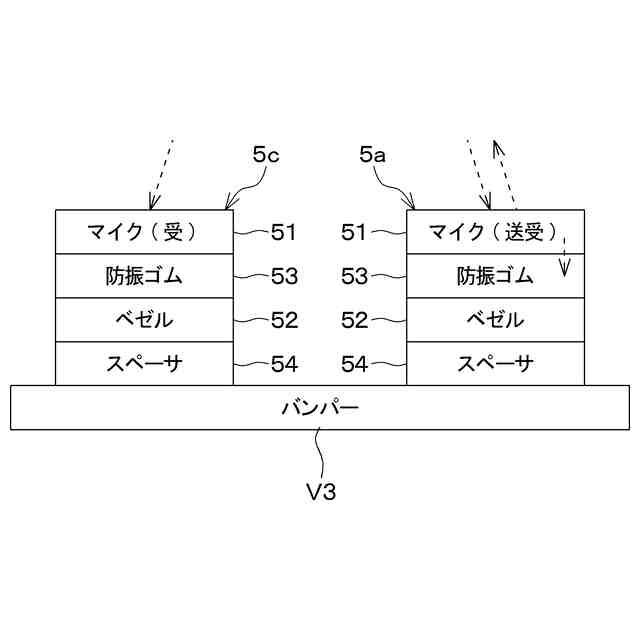
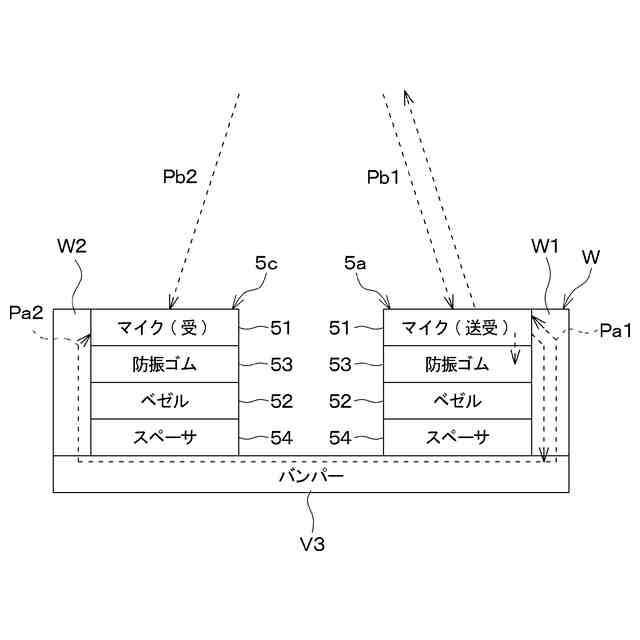
図2に示された互いに隣接する2つの超音波センサがともに凍結していない状態における振動伝達の概要を示す概略図である。
図3に示された超音波センサが凍結した状態を概略的に示す拡大断面図である。
図2に示された互いに隣接する2つの超音波センサがともに凍結した状態における振動伝達の概要を示す概略図である。
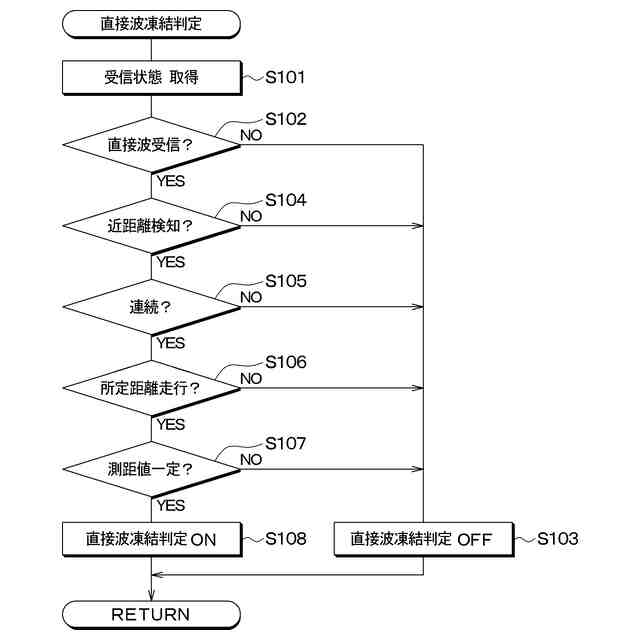
本発明の一実施形態に係る物体検知装置の動作例を示すフローチャートである。
本発明の一実施形態に係る物体検知装置の動作例を示すフローチャートである。
図10に示された間接波判定閾値時間の説明のためのグラフである。
本発明の一実施形態に係る物体検知装置の動作例を示すフローチャートである。
本発明の他の一実施形態に係る物体検知装置の動作例を示すフローチャートである。
本発明のさらに他の一実施形態に係る物体検知装置の動作例を示すフローチャートである。
本発明のさらに他の一実施形態に係る物体検知装置の動作例を示すフローチャートである。
図4に示された凍結判定部のロジック構成の他の一例を概略的に示すブロック図である。
【発明を実施するための形態】
【0009】
以下、本発明の例示的な実施形態について、適宜図面を参照しつつ説明する。なお、実施形態に対しては、適宜、構成や機能や実装例についての変更が可能である。よって、明細書中において、複数の実施形態や変形例を記載することがある。この場合、以下の説明において、或る1つの実施形態と他の実施形態との間、或る1つの実施形態とその変形例との間、あるいは、或る1つの変形例と他の変形例との間で、相互に同一または均等である部分については、同一の参照符号を付与するものとする。そして、かかる部分に関する、先行する説明は、技術的矛盾または特段の追加説明なき限り、後行する他の実施形態あるいは変形例に適宜援用され得るものとする。
【0010】
(全体構成)
図1および図2を参照すると、車両Vは、いわゆる四輪自動車であって、平面視にて略矩形状に形成された箱状の車体V1を備えている。車両Vおよび車体V1における、「前」、「後」、「左」、および「右」の概念は、図1および図2にて矢印で示した通りである。これらの方向概念は、前進走行中の車両Vにおける進行方向を向くドライバを基準としたものである。図中矢印で示された方向概念において、左右方向は「車幅方向」に相当し、前後方向は「車両全長方向」に相当する。車両全長方向は、図1を参照すると、車幅方向における車体V1の中心を通る車両中心線LCと平行である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
モータ
19日前
株式会社デンソー
モータ
13日前
株式会社デンソー
論理回路
12日前
株式会社デンソーウェーブ
分析装置
5日前
株式会社デンソー
電子装置
23日前
株式会社デンソー
光学部材
今日
株式会社デンソー
電子装置
23日前
株式会社デンソーウェーブ
決済端末
5日前
株式会社デンソー
電子装置
5日前
株式会社デンソーテン
電子機器
12日前
株式会社デンソー
トランス
19日前
株式会社デンソー
位相調整器
26日前
株式会社デンソー
半導体装置
19日前
株式会社デンソー
半導体装置
5日前
株式会社デンソー
電力変換器
5日前
株式会社デンソー
半導体装置
19日前
株式会社デンソー
電子制御装置
19日前
株式会社デンソー
電子制御装置
5日前
株式会社デンソー
電力制御装置
6日前
株式会社デンソー
負荷駆動装置
26日前
株式会社デンソー
電子制御装置
20日前
株式会社デンソー
電力変換装置
19日前
株式会社デンソー
電圧検出回路
26日前
株式会社デンソー
電圧検出回路
26日前
株式会社デンソー
モータ制御装置
5日前
株式会社デンソーテン
パネルスピーカ
5日前
株式会社デンソー
ガス燃料噴射弁
26日前
株式会社デンソー
レーダ検査装置
26日前
株式会社デンソー
移動量推定装置
19日前
株式会社デンソー
スパークプラグ
5日前
株式会社デンソー
アンテナデバイス
5日前
株式会社デンソー
開閉制御システム
5日前
株式会社デンソーウェーブ
レーザレーダ装置
19日前
株式会社デンソー
回転電機のステータ
5日前
株式会社デンソー
巻線界磁型回転電機
19日前
株式会社デンソー
半導体装置の製造方法
19日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ