TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025025230
公報種別
公開特許公報(A)
公開日
2025-02-21
出願番号
2023129822
出願日
2023-08-09
発明の名称
移動量推定装置
出願人
株式会社デンソー
,
トヨタ自動車株式会社
,
株式会社ミライズテクノロジーズ
代理人
弁理士法人明成国際特許事務所
主分類
G01C
21/28 20060101AFI20250214BHJP(測定;試験)
要約
【課題】車両の移動量の推定において、瞬時的誤差の影響を抑制する。
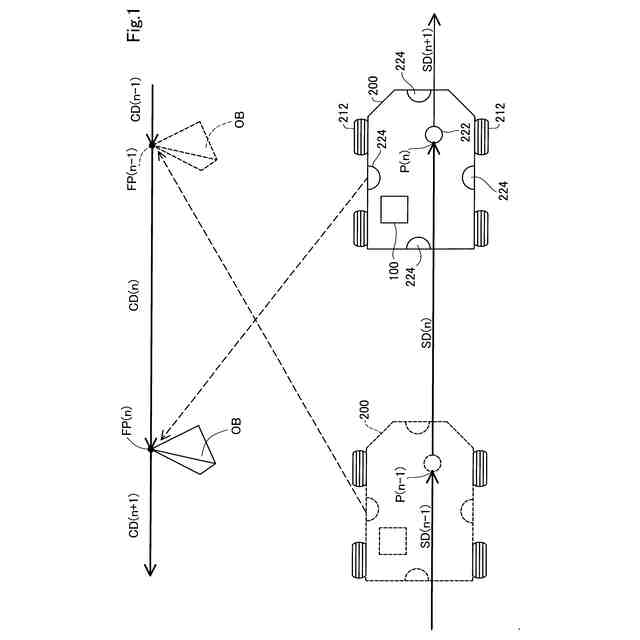
【解決手段】移動量推定装置100は、移動体に設けられる外界センサ224であって、移動体の外部の物標OBに関する外界情報を検出可能な外界センサによって検出された外界情報を用いて外界移動量CDを取得する外界移動量取得部114と、移動体に設けられる少なくとも一の内界センサ222であって、移動体の移動に関する内界情報を検出可能な内界センサによって検出された内界情報を用いて内界移動量を取得する内界移動量取得部116と、外界移動量と内界移動量との少なくともいずれかを用いて移動体の移動量を推定する移動量推定部120と、を備える。移動量推定部は、外界移動量と内界移動量との差を取得し、取得された差が予め定められた閾値以下であるか否かに基づいて、外界移動量と内界移動量とのいずれを用いて移動量を推定するかを決定する。
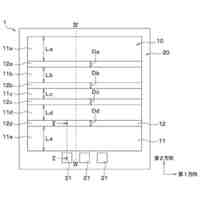
【選択図】図1
特許請求の範囲
【請求項1】
移動体の移動量を推定する移動量推定装置(100)であって、
前記移動体に設けられる少なくとも一の外界センサ(224)であって、前記移動体の外部の物標(OB)に関する外界情報を検出可能な外界センサによって検出された前記外界情報を用いて、前記移動体の移動量としての外界移動量(CD)を取得する外界移動量取得部(114)と、
前記移動体に設けられる少なくとも一の内界センサ(222)であって、前記移動体の移動に関する内界情報を検出可能な内界センサによって検出された前記内界情報を用いて、前記移動体の移動量としての内界移動量を取得する内界移動量取得部(116)と、
前記外界移動量と前記内界移動量との少なくともいずれかを用いて前記移動体の移動量を推定する移動量推定部(120)と、を備え、
前記移動量推定部は、
前記外界移動量と前記内界移動量との差を取得し、
取得された前記差が予め定められた閾値以下であるか否かに基づいて、取得された前記外界移動量と前記内界移動量とのいずれを用いて前記移動量を推定するかを決定する、
移動量推定装置。
続きを表示(約 1,400 文字)
【請求項2】
請求項1に記載の移動量推定装置であって、
さらに、前記移動量を補正するための補正値(CV)を、取得された前記差が前記閾値以下であるか否かに応じて決定する補正値決定部(118)を備え、
前記移動量推定部は、前記内界移動量と、決定された前記補正値とを用いて、前記移動量を推定する、
移動量推定装置。
【請求項3】
請求項2に記載の移動量推定装置であって、
前記閾値は、少なくとも前回以前に決定された前記補正値を用いて決定される前回補正値(CV(n-1))を用いて設定され、
前記補正値決定部は、今回取得された前記外界移動量と今回取得された前記内界移動量との差である今回差が、前記前回補正値以下であるか否かに基づいて、異なる前記補正値を決定する、
移動量推定装置。
【請求項4】
請求項3に記載の移動量推定装置であって、
前記補正値決定部は、前記今回差が前記前回補正値以下である場合に、前記今回差を今回の補正値として決定し、
前記移動量推定部は、今回取得された前記内界移動量と、決定された前記補正値とを用いて、前記移動量を推定する、
移動量推定装置。
【請求項5】
請求項3に記載の移動量推定装置であって、
前記補正値決定部は、前記今回差が前記前回補正値よりも大きい場合には、前記前回補正値を今回の補正値として決定する、
移動量推定装置。
【請求項6】
請求項5に記載の移動量推定装置であって、
前記移動量推定部は、
前記今回差が前記前回補正値よりも大きい場合に、今回取得された前記外界移動量と前回取得された前記外界移動量との差である外界移動量差と、今回取得された前記内界移動量と前回取得された前記内界移動量との差である内界移動量差とを取得し、
取得された前記外界移動量差が前記内界移動量差以上であるか否かに基づいて、取得された前記外界移動量と前記内界移動量とのいずれを用いて前記移動量を推定するかを決定する、
移動量推定装置。
【請求項7】
請求項6に記載の移動量推定装置であって、
前記補正値決定部は、取得された前記外界移動量差が前記内界移動量差以上である場合には、前記前回補正値を前記今回の補正値として前記補正値を決定し、
前記移動量推定部は、今回取得された前記内界移動量と、決定された前記補正値とを用いて、前記移動量を推定する、
移動量推定装置。
【請求項8】
請求項6に記載の移動量推定装置であって、
前記補正値決定部は、取得された前記外界移動量差が前記内界移動量差未満である場合には、前記前回補正値を前記今回の補正値として前記補正値を決定し、
前記移動量推定部は、今回取得された前記外界移動量を用いて、前記移動量を推定する、
移動量推定装置。
【請求項9】
前記外界センサは、複数の魚眼カメラを含むマルチカメラである、請求項1に記載の移動量推定装置。
【請求項10】
前記外界センサは、複数のピンホールカメラを含むマルチカメラである、請求項1に記載の移動量推定装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動量推定装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
例えば、特許文献1には、車両の外部の無線機と、車両側無線機との相対的な位置関係に基づいて車両の移動量を算出する無線位置推定部と、車輪速などを検知するセンサの情報を用いて車両の移動量を算出する車両位置推定部とを備える自車位置推定装置が開示されている。この自車位置推定装置は、無線位置推定部が算出した移動量と、車両位置推定部が算出した移動量とを比較して、両者の差分が小さくなるように車両の移動量を補正する。
【先行技術文献】
【特許文献】
【0003】
特開2022-182862号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の技術では、車両の移動量を補正するために、車両の外部に設けられる無線機を用いる。そのため、車両に備えられる装置のみで車両の移動量を推定することが求められている。この場合において、移動量の検出精度を向上させる観点から、検出結果に対するノイズの影響が抑制されることが望ましい。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
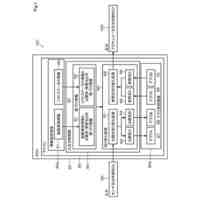
本開示の一形態によれば、移動体の移動量を推定する移動量推定装置(100)が提供される。この移動量推定装置は、前記移動体に設けられる少なくとも一の外界センサ(224)であって、前記移動体の外部の物標(OB)に関する外界情報を検出可能な外界センサによって検出された前記外界情報を用いて、前記移動体の移動量としての外界移動量(CD)を取得する外界移動量取得部(114)と、前記移動体に設けられる少なくとも一の内界センサ(222)であって、前記移動体の移動に関する内界情報を検出可能な内界センサによって検出された前記内界情報を用いて、前記移動体の移動量としての内界移動量を取得する内界移動量取得部(116)と、前記外界移動量と前記内界移動量との少なくともいずれかを用いて前記移動体の移動量を推定する移動量推定部(120)と、を備える。前記移動量推定部は、前記外界移動量と前記内界移動量との差を取得し、取得された前記差が予め定められた閾値以下であるか否かに基づいて、取得された前記外界移動量と前記内界移動量とのいずれを用いて前記移動量を推定するかを決定する。
【0007】
この形態の移動量推定装置によれば、外界移動量と内界移動量との差が閾値以下である否かにより、取得された外界移動量と内界移動量とのいずれに瞬時的誤差が含まれるか否かを判定することができる。したがって、瞬時的誤差が発生していない外界移動量と内界移動量といずれかを用いることにより、移動量の推定において、瞬時的誤差の影響を抑制することができる。
【図面の簡単な説明】
【0008】
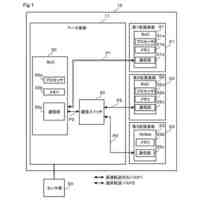
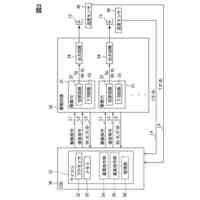
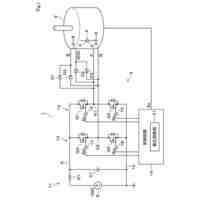
第1実施形態に係る移動量推定装置の構成を示す説明図。
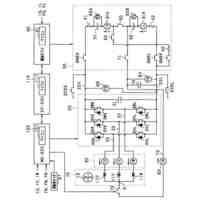
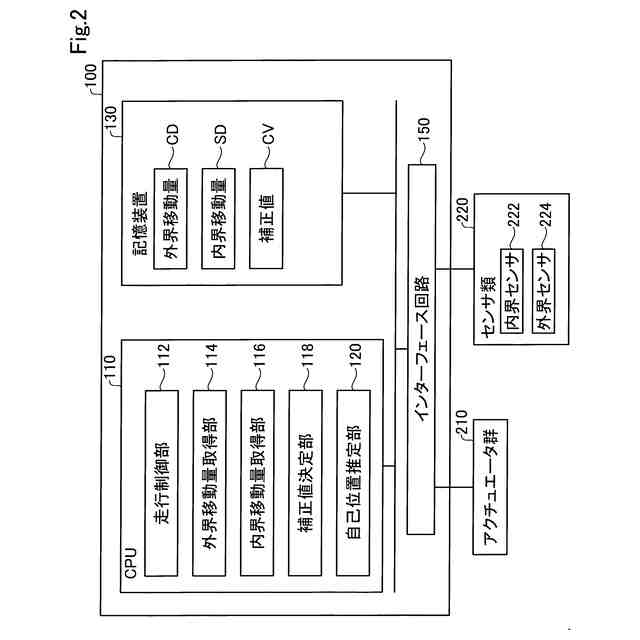
移動量推定装置の内部機能構成を示すブロック図。
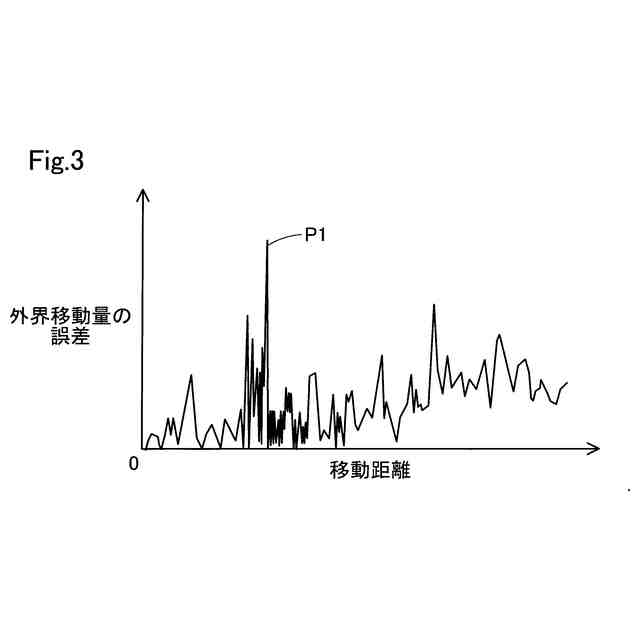
移動距離に対する外界移動量の誤差の変化を示すグラフ。
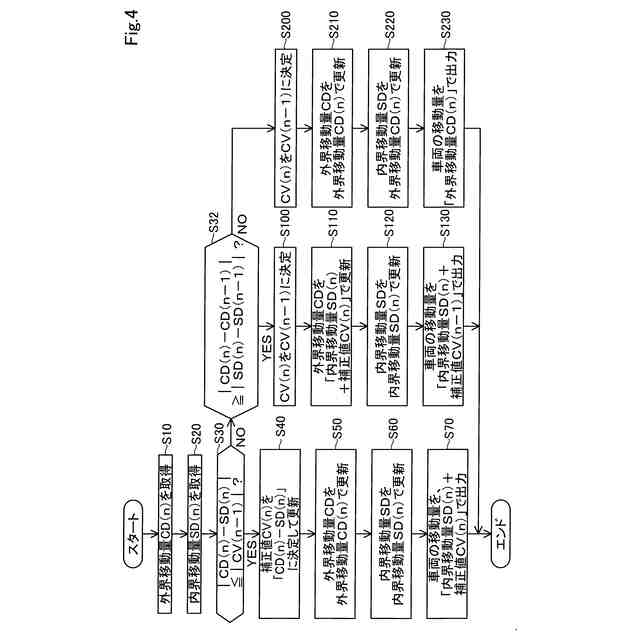
車両の移動量を推定する処理における処理ルーチンを示すフローチャート。
【発明を実施するための形態】
【0009】
A.第1実施形態:
図1は、本開示の第1実施形態に係る移動量推定装置100の構成を示す説明図である。移動量推定装置100は、車両200の移動量を推定する。車両200の移動量とは、例えば、回転行列および並行移動行列を含む並進回転移動量である。本実施形態では、移動量推定装置100は、車両200に搭載されるECU(Electronic Control Unit)であり、走行制御など、車両200の各種の制御を実行することも可能である。なお、移動量推定装置100は、ECUとは別体として車両200に設けられてもよく、また、外部のサーバなど、車両200の外部の装置によって実現されてもよい。
【0010】
移動量推定装置100による車両200の移動量の推定結果は、車両200の走行制御に利用される。「車両200の走行制御」とは、例えば、車両200の自動運転を制御する自動運転制御、運転支援制御などである。運転支援制御とは、車両200を走行車線に沿って走行させるための車線維持制御、ならびにリスク回避制御などである。「リスク回避制御」とは、車両200と物体との衝突リスクを低減するための操舵制御と制動制御とのうち少なくともいずれかを行う制御を意味する。車両200の走行制御では、車両200の位置に関する情報が用いられる。車両200の位置は、移動量推定装置100によって推定される車両200の移動量を用いて推定される。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
モータ
1日前
株式会社デンソー
モータ
9日前
株式会社デンソー
電子装置
5日前
株式会社デンソー
トランス
1日前
株式会社デンソー
電子装置
5日前
株式会社デンソー
半導体装置
1日前
株式会社デンソー
位相調整器
8日前
株式会社デンソー
半導体装置
1日前
株式会社デンソー
電力変換装置
9日前
株式会社デンソー
動力伝達装置
9日前
株式会社デンソー
電圧検出回路
8日前
株式会社デンソー
電圧検出回路
8日前
株式会社デンソー
負荷駆動装置
8日前
株式会社デンソー
電子制御装置
2日前
株式会社デンソー
電力変換装置
1日前
株式会社デンソー
電子制御装置
1日前
株式会社デンソー
移動量推定装置
1日前
株式会社デンソー
ガス燃料噴射弁
8日前
株式会社デンソー
動揺病抑制装置
9日前
株式会社デンソー
レーダ検査装置
8日前
株式会社デンソーテン
ディスプレイ装置
9日前
株式会社デンソーウェーブ
レーザレーダ装置
1日前
株式会社デンソー
巻線界磁型回転電機
1日前
株式会社デンソー
静電モータ駆動回路
8日前
株式会社デンソー
電界効果トランジスタ
9日前
株式会社デンソー
保護フィルム剥離装置
1日前
株式会社デンソー
半導体装置の製造方法
1日前
株式会社デンソー
電力変換装置の制御装置
15日前
株式会社デンソー
電力変換装置の制御装置
8日前
株式会社デンソー
電力変換装置、プログラム
2日前
株式会社デンソー
電力変換装置、プログラム
2日前
株式会社デンソー
半導体装置とその製造方法
1日前
株式会社デンソー
光偏向器および光走査装置
8日前
株式会社デンソー
電力変換装置、プログラム
2日前
株式会社デンソー
半導体装置および電力変換装置
1日前
株式会社デンソー
コイル体、電機子及び回転電機
1日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ