TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025020950
公報種別
公開特許公報(A)
公開日
2025-02-13
出願番号
2023124595
出願日
2023-07-31
発明の名称
モータ
出願人
株式会社デンソー
代理人
個人
,
個人
主分類
H02K
1/22 20060101AFI20250205BHJP(電力の発電,変換,配電)
要約
【課題】大きいディテントトルクを確保可能としたモータを提供すること。
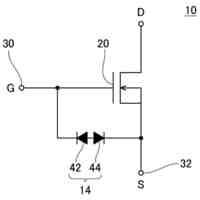
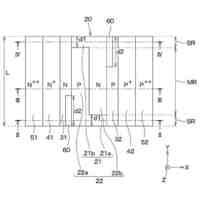
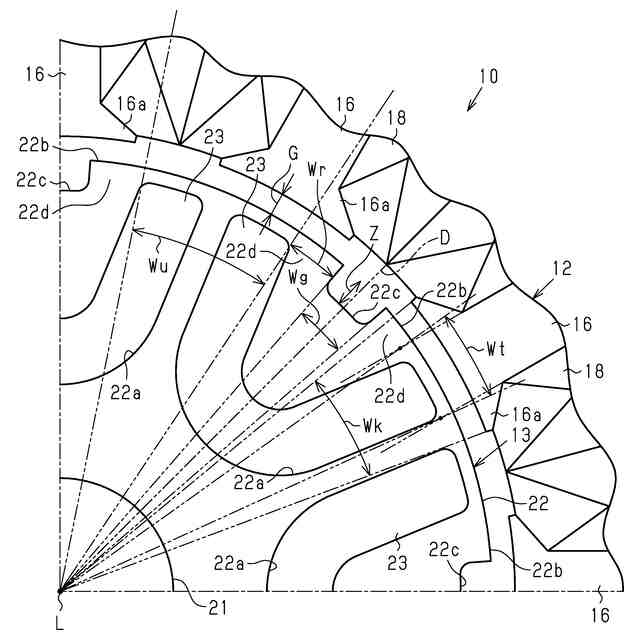
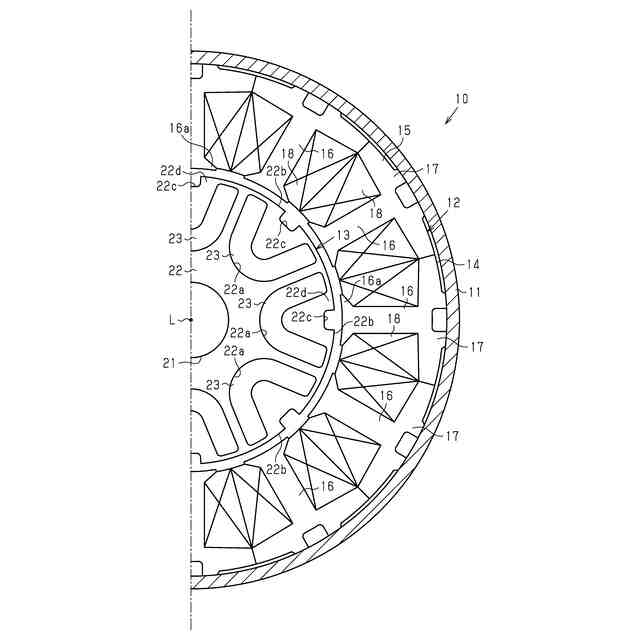
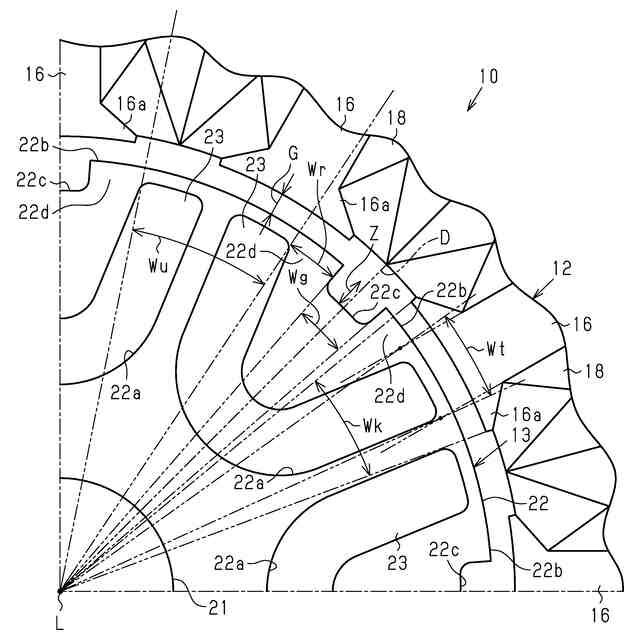
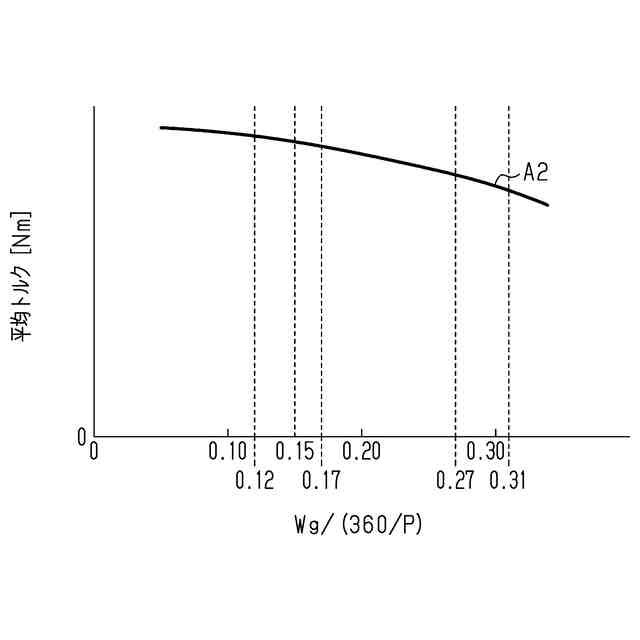
【解決手段】モータ10は、軸中心Lに向かって延びる周方向に複数のティース16と、ティースに巻回された巻線18とを有する円環状のステータ12と、ステータの内側に回転可能に収容されるロータコア22と、ロータコアの内部に設けられた周方向に複数の永久磁石23とを有し、ロータコアにおけるステータとの対向面に複数の永久磁石によって周方向に複数の磁極部22bが形成されるロータ13とを備える。磁極部は、径方向内側に凹設された溝22cを有し、溝は、磁極部における周方向の中心である磁極中心から周方向に対称に形成され、溝の径方向外側端部における溝幅の角度をWgとし、磁極部の数をPとして、0.12<Wg/(360/P)<0.31を満たすように設定されている。
【選択図】図2
特許請求の範囲
【請求項1】
軸中心(L)に向かって延びる周方向に複数のティース(16)と、前記ティースに巻回された巻線(18)とを有する円環状のステータ(12)と、
前記ステータの内側に回転可能に収容されるロータコア(22)と、前記ロータコアの内部に設けられた周方向に複数の永久磁石(23,32,33,36,37)とを有し、前記ロータコアにおける前記ステータとの対向面に前記複数の永久磁石によって周方向に複数の磁極部(22b)が形成されるロータ(13)と、を備えたモータ(10)であって、
前記磁極部は、径方向内側に凹設された溝(22c,31)を有し、
前記溝は、前記磁極部における周方向の中心である磁極中心から周方向に対称に形成され、
前記溝の径方向外側端部における溝幅の角度をWgとし、
前記磁極部の数をPとして、
0.12<Wg/(360/P)<0.31
を満たすように設定されている、
モータ。
続きを表示(約 1,200 文字)
【請求項2】
0.12<Wg/(360/P)<0.27
を満たすように設定されている、
請求項1に記載のモータ。
【請求項3】
前記ティースの径方向内側端部における幅の角度をWkとし、
前記溝の周方向の側方で磁路を構成する前記ロータコアの磁路部(22d)の幅の角度をWrとして、
0.7<Wk/(2×Wr+Wg)<1.0
を満たすように設定されている、
請求項1に記載のモータ。
【請求項4】
前記溝の周方向の側方で磁路を構成する前記ロータコアの磁路部の幅の角度をWrとし、
前記ティースの最小の幅が前記磁路部と同じ径方向位置にある場合の角度をWtとして、
0.5×Wt<Wr<Wt
を満たすように設定されている、
請求項1に記載のモータ。
【請求項5】
前記ティースと前記ロータコアとのエアギャップをGとし、
前記溝の径方向の深さをZとして、
Z/G≧0.75
を満たすように設定されている、
請求項1に記載のモータ。
【請求項6】
前記磁極部の各々に配置される前記永久磁石は、径方向外側が開口したU字またはV字に配置されている、
請求項1に記載のモータ。
【請求項7】
前記磁極部の数をPとし、
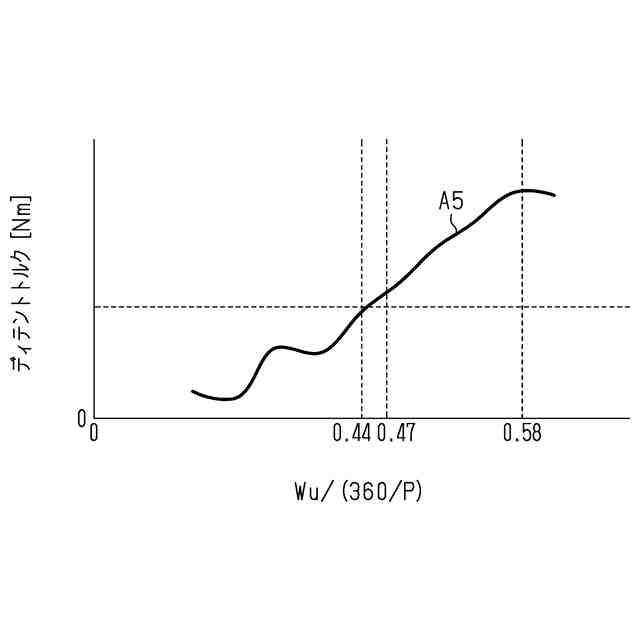
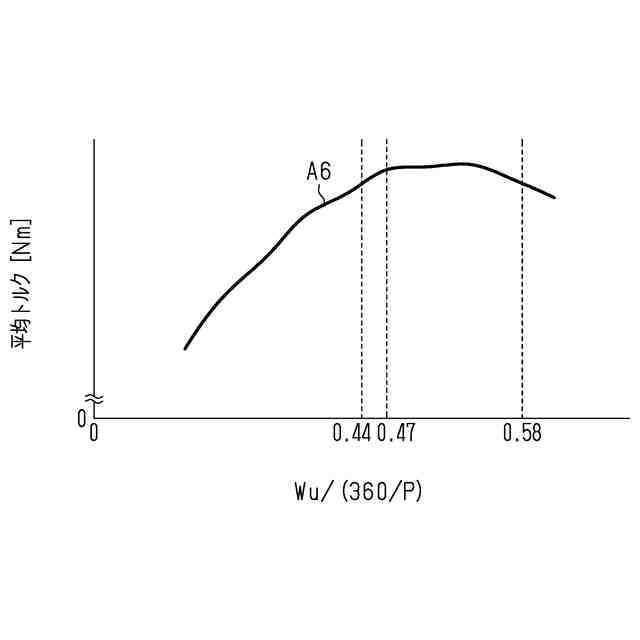
周方向に隣り合う前記永久磁石の端部同士を合わせた幅の角度をWuとして、
0.44<Wu/(360/P)<0.58
を満たすように設定されている、
請求項6に記載のモータ。
【請求項8】
前記溝(31)は、周方向の端面(31a)が径方向内側に向かうほど幅が広くなるように傾斜している、
請求項1に記載のモータ。
【請求項9】
前記永久磁石(32)の端部は、径方向外側に向かうほど前記溝の周方向端面から遠ざかる方向に延びつつも、前記溝の周方向の端面に近づく方向に突出する肉厚部(32a)を有する、
請求項1に記載のモータ。
【請求項10】
前記永久磁石(33,36)は、前記複数の磁極部における周方向の1つおきに配置されるものであり、
前記複数の磁極部は、前記永久磁石が配置された磁石磁極部(34)と、前記永久磁石が配置されていない非磁石磁極部(35)とが周方向に交互に配置されてなるものであり、
前記磁石磁極部における前記溝の周方向の側方で磁路を構成する前記ロータコアの磁石磁路部(22f)の幅の角度をWr1とし、
前記非磁石磁極部における前記溝の周方向の側方で磁路を構成する前記ロータコアの非磁石磁路部(22g)の幅の角度をWr2として、
(2×Wr1+Wg)/(2×Wr2+Wg)≦1.5
を満たすように、フラックスバリア(22h,22k)が設定されている、
請求項1に記載のモータ。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、モータに関するものである。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
電動可変バルブタイミング装置などの位置保持機能を必要とする装置に用いられるモータは、大きいディテントトルクを必要とする。ディテントトルクの向上を図ったモータとしては、ロータにおけるステータとの対向面に溝を設けたものが提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2019-41530号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記のようなモータでは、ロータに設けた溝によってディテントトルクの向上が図れるものの、本発明者らは、より大きいディテントトルクが必要となった場合にも対応できる構成を検討していた。
【0005】
本発明の目的は、大きいディテントトルクを確保可能としたモータを提供することにある。
【課題を解決するための手段】
【0006】
上記課題を解決するモータ(10)は、軸中心(L)に向かって延びる周方向に複数のティース(16)と、前記ティースに巻回された巻線(18)とを有する円環状のステータ(12)と、前記ステータの内側に回転可能に収容されるロータコア(22)と、前記ロータコアの内部に設けられた周方向に複数の永久磁石(23,32,33,36,37)とを有し、前記ロータコアにおける前記ステータとの対向面に前記複数の永久磁石によって周方向に複数の磁極部(22b)が形成されるロータ(13)と、を備えたモータ(10)であって、前記磁極部は、径方向内側に凹設された溝(22c,31)を有し、前記溝は、前記磁極部における周方向の中心である磁極中心から周方向に対称に形成され、前記溝の径方向外側端部における溝幅の角度をWgとし、前記磁極部の数をPとして、0.12<Wg/(360/P)<0.31を満たすように設定されている。
【0007】
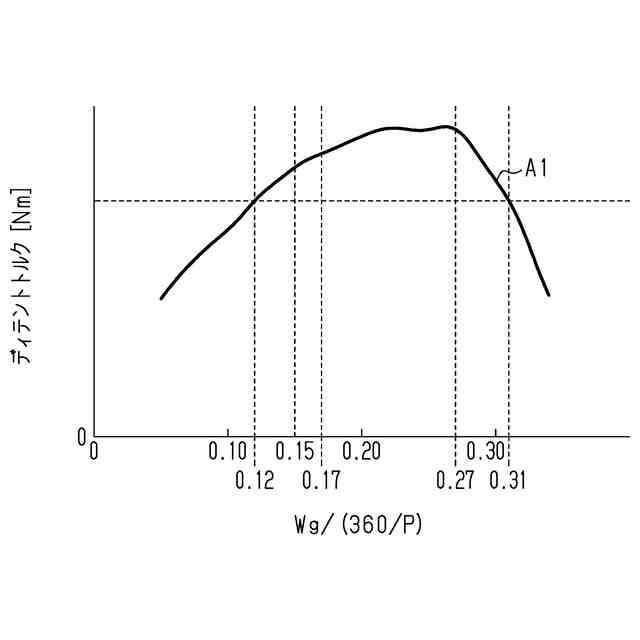
同構成によれば、磁極中心から周方向に対称に形成される溝の径方向外側端部における溝幅の角度をWgとし、磁極部の数をPとして、0.12<Wg/(360/P)<0.31を満たすように設定されるため、大きいディテントトルクを確保できる。つまり、図4に示すように、0.12<Wg/(360/P)<0.31を満たすように設定されるため、0.12<Wg/(360/P)<0.31を満たさない場合に比べて、大きいディテントトルクを得ることができる。
【0008】
上記課題を解決するモータ(10)は、軸中心(L)に向かって延びる周方向に複数のティース(16)と、前記ティースに巻回された巻線(18)とを有する円環状のステータ(12)と、前記ステータの内側に回転可能に収容されるロータコア(22)と、前記ロータコアの内部に設けられた周方向に複数の永久磁石(23,32,33,36,37)とを有し、前記ロータコアにおける前記ステータとの対向面に前記複数の永久磁石によって周方向に複数の磁極部(22b)が形成されるロータ(13)と、を備えたモータであって、前記磁極部は、径方向内側に凹設された溝(22c,31)、または前記溝の径方向外側端部が閉塞された形状の孔を有し、コギングピーク位置において、前記複数のティースの内の前記磁極部に対する角度の状態が同一となる特定のティースが発生する総トルクが、コギングトルクの80%から120%の範囲内となるように設定されている。
【0009】
同構成によれば、コギングピーク位置において、磁極部に対する角度の状態が同一となる特定のティースが発生する総トルクが、コギングトルクの80%から120%の範囲内となるように設定されているため、大きいディテントトルクを得ることができる。
【図面の簡単な説明】
【0010】
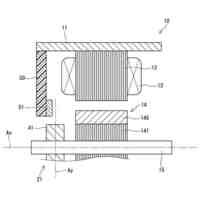
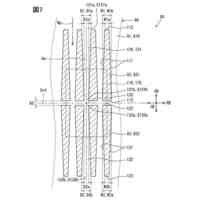
一実施形態におけるモータの一部断面図。
一実施形態におけるモータの一部平面図。
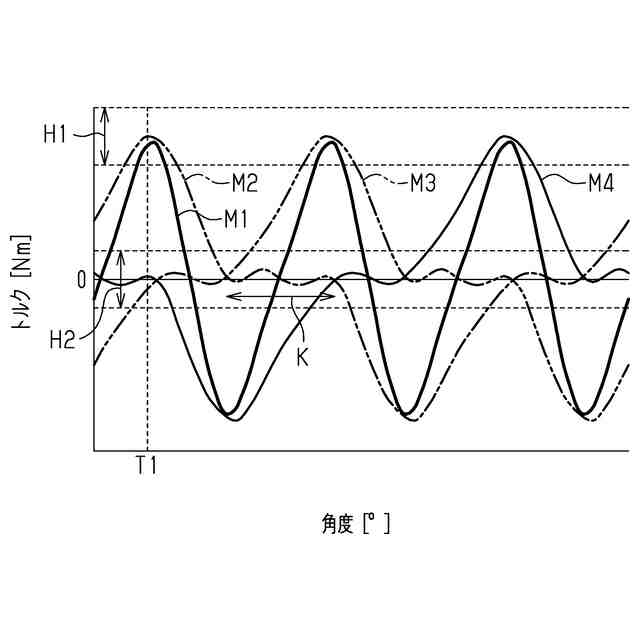
一実施形態におけるモータの角度-トルク特性図。
一実施形態におけるモータのWg/(360/P)-ディテントトルク特性図。
一実施形態におけるモータのWg/(360/P)-平均トルク特性図。
一実施形態におけるモータのWk/(2×Wr+Wg)-ディテントトルク特性図。
一実施形態におけるモータのZ/G-ディテントトルク特性図。
一実施形態におけるモータのWu/(360/P)-ディテントトルク特性図。
一実施形態におけるモータのWu/(360/P)-平均トルク特性図。
一実施形態におけるモータのWk/(360/S)-ディテントトルク特性図。
別例におけるモータの一部平面図。
別例におけるモータのWa-ディテントトルク特性図。
別例におけるモータの一部平面図。
別例におけるモータのWb-ディテントトルク特性図。
別例におけるモータのWb-平均トルク特性図。
別例におけるモータの一部平面図。
別例におけるモータの(2×Wr1+Wg)/(2×Wr2+Wg)-平均トルク特性図。
別例におけるモータの(2×Wr1+Wg)/(2×Wr2+Wg)-ディテントトルク特性図。
別例におけるモータの角度-トルク特性図。
別例におけるモータの(2×Wr1+Wg)/(2×Wr2+Wg)-リップル率特性図。
別例におけるモータの一部平面図。
別例におけるモータの一部平面図。
別例におけるモータの(Wgs-Wg)-平均トルク特性図。
別例におけるモータの一部平面図。
別例におけるモータの一部平面図。
別例におけるモータの一部平面図。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
電池装置
今日
株式会社デンソー
電子装置
10日前
株式会社デンソー
保冷容器
4日前
株式会社デンソー
熱交換器
4日前
株式会社デンソー
熱交換器
4日前
株式会社デンソー
光学部材
5日前
株式会社デンソー
光学部材
3日前
株式会社デンソー
電子装置
4日前
株式会社デンソー
通信装置
4日前
株式会社デンソー
半導体装置
10日前
株式会社デンソー
半導体装置
4日前
株式会社デンソー
電子制御装置
4日前
株式会社デンソー
電子制御装置
4日前
株式会社デンソー
光位相変調器
4日前
株式会社デンソー
通信システム
4日前
株式会社デンソー
電子制御装置
4日前
株式会社デンソー
電池ユニット
3日前
株式会社デンソー
電力変換装置
3日前
株式会社デンソー
通信システム
3日前
株式会社デンソー
電子制御装置
4日前
株式会社デンソーテン
パネルスピーカ
10日前
株式会社デンソーエレクトロニクス
ワイパ制御装置
3日前
株式会社デンソー
モータ制御装置
4日前
株式会社デンソー
スパークプラグ
10日前
株式会社デンソー
モータ制御装置
10日前
株式会社デンソー
回転角度検出装置
4日前
株式会社デンソー
アンテナデバイス
10日前
株式会社デンソー
マイクロホン装置
3日前
株式会社デンソー
回転電機のステータ
10日前
株式会社デンソー
インピーダンス測定装置
4日前
株式会社デンソーテン
制御装置および制御方法
5日前
株式会社デンソー
車両用故障診断システム
10日前
株式会社デンソー
車両用電子制御装置及び方法
4日前
株式会社デンソー
車両用電子制御装置及び方法
4日前
株式会社デンソーテン
樹脂成型品及び車載情報機器
10日前
株式会社SOKEN
駆動装置
4日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ