TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025030409
公報種別
公開特許公報(A)
公開日
2025-03-07
出願番号
2023135684
出願日
2023-08-23
発明の名称
モータ制御装置
出願人
株式会社デンソー
代理人
名古屋国際弁理士法人
主分類
H02P
6/16 20160101AFI20250228BHJP(電力の発電,変換,配電)
要約
【課題】本開示の1つの局面は、回転センサが検出するロータの回転位置を高精度に補正する技術を提供する。
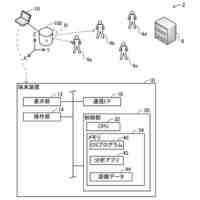
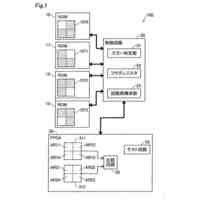
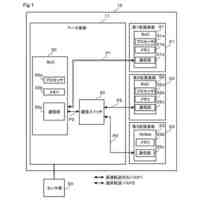
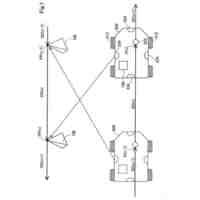
【解決手段】位相差検出部54は、ブラシレスモータ10のロータ14の回転位置の検出信号とステータコイル12U、12V、12Wの誘起電圧との発生タイミングの位相差を検出する。周期検出部54は、検出信号の信号周期を検出する。順序判定部54は、検出信号と誘起電圧との発生タイミングの順序を判定する。補正部54は、検出信号の信号周期が所定周期以内で、検出信号が誘起電圧よりも進んでいる正順か、あるいは遅れている逆順の場合、位相差に基づいてステータコイルへの通電タイミングを補正し、信号周期が所定周期以内で正順と逆順とが混じっているか、あるいは信号周期が所定周期よりも長い場合、過去に学習した補正の学習値に基づいてステータコイルへの通電タイミングを補正する。
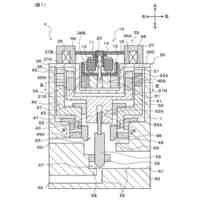
【選択図】図1
特許請求の範囲
【請求項1】
ブラシレスモータ(10)の回転を制御するモータ制御装置(50)であって、
磁極を有するロータ(14)の回転位置を検出する回転センサ(22)の検出信号の発生タイミングと、ステータ(12)のステータコイル(12U、12V、12W)に発生する誘起電圧の前記発生タイミングとの位相差を検出するように構成された位相差検出部(54、S410、S412)と、
前記検出信号の信号周期を検出するように構成された周期検出部(54、S406)と、
前記検出信号の前記発生タイミングと前記誘起電圧の前記発生タイミングとの順序を判定するように構成されている順序判定部(54、S412)と、
前記周期検出部が検出する前記検出信号の前記信号周期が所定周期以下で、前記検出信号の前記発生タイミングが前記誘起電圧の前記発生タイミングよりも進んでいる正順と前記順序判定部が判定するか、あるいは前記検出信号の前記発生タイミングが前記誘起電圧の前記発生タイミングよりも遅れている逆順と前記順序判定部が判定する場合、前記位相差検出部が検出する前記位相差に基づいて前記ステータコイルへの通電タイミングを補正し、前記信号周期が前記所定周期以下で前記正順と前記逆順とが混じっているか、あるいは前記信号周期が前記所定周期よりも長い場合、過去に前記正順または前記逆順の場合に前記通電タイミングを補正するために学習した学習値に基づいて前記ステータコイルへの前記通電タイミングを補正するように構成された補正部(54、S408、S420~S434)と、
を備えるモータ制御装置。
続きを表示(約 300 文字)
【請求項2】
請求項1に記載のモータ制御装置であって、
前記位相差検出部は、前記ロータの回転中に前記ステータコイルへの通電がオフされると、前記位相差を検出するように構成されている、
モータ制御装置。
【請求項3】
請求項1に記載のモータ制御装置であって、
前記順序判定部は、前記検出信号が発生してから前記検出信号の前記信号周期の1/2以下の間で前記誘起電圧が発生すると前記正順と判定し、前記検出信号が発生してから前記検出信号の前記信号周期の1/2よりも遅れて前記誘起電圧が発生すると前記逆順と判定するように構成されている、
モータ制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ブラシレスモータの回転を制御する技術に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
ブラシレスモータのロータの回転位置を回転センサで検出し、ロータの回転位置に基づいてステータコイルへの通電を制御することによりブラシレスモータの回転を制御する技術が知られている。
【0003】
しかしながら、回転センサの取り付け位置の誤差、あるいは回転センサの特性ばらつきにより、回転センサが検出する回転位置がばらつくことがある。この場合、回転センサが検出する回転位置に基づいて制御されるステータコイルへの通電タイミングがずれるので、ブラシレスモータの回転を適正に制御できず、騒音や振動が増加することがあった。
【0004】
そこで、下記特許文献1では、回転センサによる回転位置の検出信号と、ステータコイルに発生する誘起電圧との位相差に基づいて、回転センサが検出するロータの回転位置を補正する技術が提案されている。
【0005】
特許文献1に記載の技術では、回転センサの検出信号の発生タイミングが誘起電圧の発生タイミングよりも進んでいる正順と遅れている逆順とのいずれの場合であっても、回転センサが検出するロータの回転位置を補正することができる。
【先行技術文献】
【特許文献】
【0006】
特開2017-169332号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、回転センサの検出信号の発生タイミングと誘起電圧の発生タイミングとの順序として正順と逆順とが混じると、正順と逆順とのどちらに合わせて、回転センサが検出するロータの回転位置を補正すればよいかを判定できない。
【0008】
また、ブラシレスモータの異常などにより、回転センサの検出信号の信号周期が所定周期より長くなると、マイコン等において信号周期等の時間をカウントするカウンタがオーバーフローする恐れがある。カウンタがオーバーフローすると、回転位置の検出信号とステータコイルに発生する誘起電圧との位相差に基づいて、回転センサが検出するロータの回転位置を補正することができない。
【0009】
特許文献1の記載の技術では、回転センサの検出信号の発生タイミングと誘起電圧の発生タイミングとについて正順と逆順とが混じるか、検出信号の信号周期が所定周期よりも長くなると、固定の補正値でロータの回転位置を補正することが考えられる。
【0010】
しかしながら、発明者の詳細な検討の結果、固定の補正値を使用すると、回転センサが検出するロータの回転位置を補正する精度が低下するという課題が見出された。
本開示の1つの局面は、回転センサが検出するロータの回転位置を高精度に補正する技術を提供することにある。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
モータ
10日前
株式会社デンソー
モータ
16日前
株式会社デンソー
モータ
24日前
株式会社デンソーテン
電子機器
9日前
株式会社デンソーウェーブ
分析装置
2日前
株式会社デンソーウェーブ
決済端末
2日前
株式会社デンソー
電子装置
20日前
株式会社デンソー
電子装置
20日前
株式会社デンソー
トランス
16日前
株式会社デンソー
電子装置
2日前
株式会社デンソー
論理回路
9日前
株式会社デンソー
半導体装置
16日前
株式会社デンソー
半導体装置
16日前
株式会社デンソー
電力変換器
2日前
株式会社デンソー
半導体装置
2日前
株式会社デンソー
位相調整器
23日前
株式会社デンソー
電力制御装置
3日前
株式会社デンソー
電子制御装置
2日前
株式会社デンソー
電力変換装置
24日前
株式会社デンソー
電子制御装置
16日前
株式会社デンソー
電子制御装置
17日前
株式会社デンソー
動力伝達装置
24日前
株式会社デンソー
電力変換装置
16日前
株式会社デンソー
負荷駆動装置
23日前
株式会社デンソー
電圧検出回路
23日前
株式会社デンソー
電圧検出回路
23日前
株式会社デンソー
動揺病抑制装置
24日前
株式会社デンソー
ガス燃料噴射弁
23日前
株式会社デンソー
モータ制御装置
2日前
株式会社デンソーテン
パネルスピーカ
2日前
株式会社デンソー
移動量推定装置
16日前
株式会社デンソー
レーダ検査装置
23日前
株式会社デンソー
スパークプラグ
2日前
株式会社デンソーウェーブ
レーザレーダ装置
16日前
株式会社デンソー
開閉制御システム
2日前
株式会社デンソー
アンテナデバイス
2日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ